基于磁场辅助沉积的闭环原子力伺服反馈控制系统及方法
- 国知局
- 2024-07-27 11:10:57
本发明属于电化学沉积微纳米级体元及微米级构型的高精度定域微增材制造,特别是涉及到一种基于磁场辅助沉积的闭环原子力伺服反馈控制系统及方法。
背景技术:
1、由于电化学沉积过程中多体元结合因素作用,沉积体容易出现表面质量过低、结晶形态不良、晶粒粗大和沉积层错位等现象。结合质量较差、结构致密度较低是沉积体元接合精密控制的难题,实现纳米级精度沉积过程的有效自动监控是现阶段的焦点问题。
2、另外,磁场产生的洛伦兹力、磁化力以及磁流体动力学效应对电沉积过程中的粒子运动过程、传递、吸附、晶粒生长、沉积速度具有重要影响,对性能具有决定性作用。
3、目前,原子力显微镜技术(afm)在多维扫描过程中具有高分辨率、高速度及高稳定性的特点,并能准确控制其与样品间的相互作用力,但是相应的对微悬臂的弯曲特性精确控制也提出了挑战。现有技术中,虽然将原子力显微镜技术(afm)应用到了电化学沉积设备中,但是由于对微悬臂的弯曲特性控制精度较低而且没有使用磁场辅助设备,因此仍无法做到高精度结构尺寸沉积,并且多体元间结合质量较差,结构致密度低,进而影响了纳米尺度下的组件间结合质量和结构密度。
4、因此现有技术当中亟需要一种新型的技术方案来解决这一问题。
技术实现思路
1、本发明所要解决的技术问题是:提供一种基于磁场辅助沉积的闭环原子力伺服反馈控制系统及方法用于解决现有技术中对微悬臂的弯曲特性控制精度低,因此仍无法做到高精度结构尺寸沉积,并且多体元间结合质量较差,结构致密度低的技术问题。
2、基于磁场辅助沉积的闭环原子力伺服反馈控制系统,包括增材制造装置主体,所述增材制造装置主体包括控制器、恒电位仪、电极单元、双向x-y-z轴移动单元、电解液压力控制单元、原子力探针单元以及位于原子力探针单元下方的电镀槽,所述原子力探针单元包括原子力探针和微悬臂,其特征是:还包括z向反馈控制单元、z向微位移单元和磁场辅助系统,
3、所述z向微位移单元包括三维压电陶瓷扫描器伺服电机和压电陶瓷陶管致动器;所述三维压电陶瓷扫描器伺服电机分别与压电陶瓷陶管致动器以及控制器连接;
4、所述z向反馈控制单元在原子力探针单元的探针与沉积体元处于接触状态下对微悬臂进行z向位移的闭环控制,z向反馈控制单元包括z向反馈控制器、固体激光二极管、位置感知检测器psd、锁相放大器和功率放大器;所述固体激光二极管发射激光照射到原子力探针单元的原子力探针微悬臂上;所述微悬臂上具有金涂层,具有金涂层的微悬臂反射回的信号照射到位置感知检测器psd;所述位置感知检测器psd对接收的信号进行光电转换,并将转换后的电压信号反馈到锁相放大器;所述锁相放大器实时获得的电压信号为微悬臂变形引起的直流电压值并传输给z向反馈控制器;所述z向反馈控制器传输微悬臂变形引起的直流电压值给增材制造装置主体的控制器;
5、增材制造装置主体的控制器将接收的微悬臂变形引起的直流电压值以及控制器的程序电压设定值取差值,通过获取的差值、探针的实时位置数据,然后将两者分别与设定阈值和目标位置进行比较,生成控制信号,控制三维压电陶瓷扫描器伺服电机进而控制压电陶瓷陶管致动器带动微悬臂沿z向上升,直至微悬臂变形引起的直流电压值小于设定阈值,实现微悬臂变形的闭环在线监测;
6、所述磁场辅助系统包括直流电源控制系统和由圆形漆包铜导线绕制形成的呈空心圆筒形的线圈,所述直流电源控制系统的正负极分别与线圈的两端连接;所述增材制造装置主体的电镀槽中设置有绝缘塑料腔;所述电极单元包括碳纤维阳极、参比电极ag/agcl和工作电极;所述绝缘塑料腔的内底部安装工作电极,绝缘塑料腔的上部边缘设置有碳纤维阳极和参比电极ag/agcl;所述线圈套装在绝缘塑料腔外侧壁上。
7、所述程序电压设定值为通过在控制器中各设定值相应自动生成;所述各设定值包括沉积位置、沉积电位、磁场大小和体元高度。
8、所述z向反馈控制器中设置有两个数据采集卡,其中一个数据采集卡为电压信号采集卡,用于收集提供给导电基板的电压信号;另一个数据采集卡为电压偏转信号采集卡,用于收集来自原子力显微镜的电压偏转信号,电压偏转信号采集卡与增材制造装置主体的压电致动器相连接,控制探针x、y、z三个方向的压电位置。
9、所述z向反馈控制器中还设置有积分控制器;在积分反馈控制中,所述积分控制器用于控制打印过程中z向反馈控制器的输入和输出之间的控制精度,减少偏差,进而电压偏转信号采集卡采集到的信号精度相应提高。
10、基于磁场辅助沉积的闭环原子力伺服反馈控制系统还包括电解液压力微调单元,所述电解液压力控制单元包括电解液压力控制器、微压力泵、控制阀和压电致动器;所述电解液压力控制器压通过电致动器与微压力泵连接;所述控制阀安装在给探针供电解液的管路上,控制阀与电解液压力控制器连接;
11、所述电解液压力微调单元包括压力传感器和数据采集卡ⅱ;所述数据采集卡ⅱ加装在电解液压力控制器上,并与电解液压力控制器连接;所述压力传感器安装在控制阀的进液端,用来监测经过控制阀调节后的电解液实际压力,压力传感器通过检测电解液流动产生的压力数据实时监测电解液的流动情况,并将压力数据传输给数据采集卡ⅱ;所述电解液压力控制器接收数据采集卡ⅱ上的压力数据,电解液压力控制器根据预先设定的压力值以及预定的pid控制逻辑计算与当前压力的偏差,基于该偏差来通过调整微压力泵以及控制阀的状态,从而控制电解液的压力和流速,实现电解液在探针针尖的定域流出,并且保证探针针尖处的压力满足设定要求。
12、基于磁场辅助沉积的闭环原子力伺服反馈控制方法,利用所述的基于磁场辅助沉积的闭环原子力伺服反馈控制系统,包括以下步骤,并且以下步骤顺次进行:
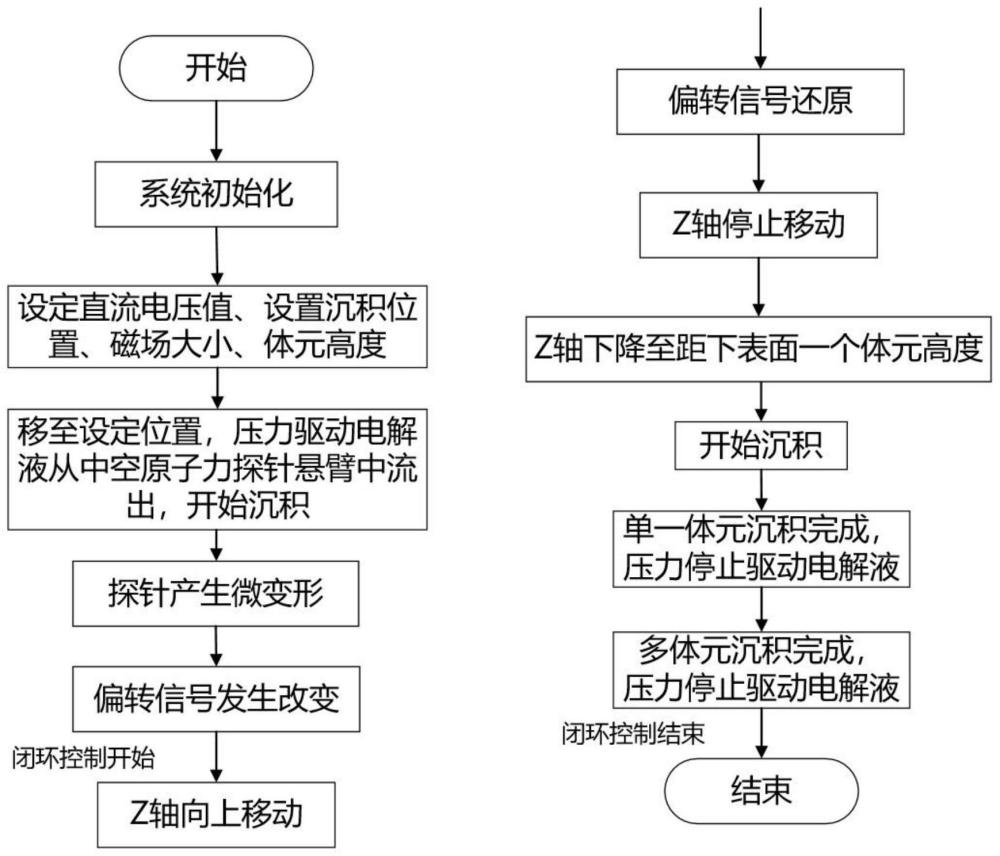
13、步骤一、将待沉积的导电基板与恒电位仪的电源负极相连接并放入绝缘塑料腔并开启直流电源控制系统;
14、步骤二、将原子力探针填充0.5m的硫酸铜电解液;
15、步骤三、将打印文件导入到增材制造装置主体的控制器内,在控制器上设置各设定值,开始打印;
16、步骤四、电解液在微压力泵的驱动下经过微悬臂从探针针尖806处流入支撑溶液中,在距离导电基板上表面设定位置高度开始沉积;
17、步骤五、沉积过程中,沉积体元接触探针针尖,使探针针尖的作用力发生变化,引起微悬臂的弯曲变形;
18、步骤六、固体激光二极管发射的激光照射到具有金涂层的微悬臂上,反射回来的信号经过位置感知检测器psd的光电转换形成电压信号并反馈到与之相连的锁相放大器中,锁相放大器实时获得的电压信号是一个反映微悬臂位移的直流电压值,将该直流电压值传送给z向反馈控制器;
19、步骤七、增材制造装置主体的控制器将接收的微悬臂变形引起的直流电压值以及控制器的程序电压设定值取差值,通过获取的差值、微悬臂端头的实时位置数据,然后将两者分别与设定阈值和目标位置进行比较,生成控制信号,控制三维压电陶瓷扫描器伺服电机进而控制压电陶瓷陶管致动器带动微悬臂沿z向上升,直至微悬臂变形引起的直流电压值小于设定阈值时或者微悬臂在z向上升1微米微悬臂停止上升;所述程序电压设定值为通过在控制器中各设定值相应自动生成;
20、步骤八、z轴运动到下一沉积体元的上方,距离导电基板一个体元高度处停止,重复步骤七,继续进行下一体元的沉积和微悬臂变形的闭环控制,实现微悬臂变形的闭环在线监测;
21、步骤九、沉积完成后,微压力泵停止工作,探针中的电解液停止流动,微悬臂在双向x-y-z轴移动单元的带动下回到初始位置,将导电基板取出,经清洗装在样件盒内,关闭电源控制系统。
22、所述步骤三中的打印文件为.csv格式,打印文件包含有关每个体元位置、压力和沉积电位、磁场电源参数的信息;所述位置为其在x、y、z三轴中的位置,记为(x、y、z)。
23、所述步骤五中,沉积过程中通过电解液压力微调单元对电解液的压力和流速进行控制,实现电解液在探针针尖的定域流出;
24、所述电解液压力控制单元包括电解液压力控制器、微压力泵、控制阀和压电致动器;所述电解液压力控制器压通过电致动器与微压力泵连接;所述控制阀安装在给探针供电解液的管路上,控制阀与电解液压力控制器连接;
25、所述电解液压力微调单元包括压力传感器和数据采集卡ⅱ;所述数据采集卡ⅱ加装在电解液压力控制器上,并与电解液压力控制器连接;所述压力传感器安装在控制阀的进液端,用来监测经过控制阀调节后的电解液实际压力,压力传感器通过检测电解液流动产生的压力数据实时监测电解液的流动情况,并将压力数据传输给数据采集卡ⅱ;所述电解液压力控制器接收数据采集卡ⅱ上的压力数据,电解液压力控制器根据预先设定的压力值以及预定的pid控制逻辑计算与当前压力的偏差,基于该偏差来通过调整微压力泵以及控制阀的状态,从而控制电解液的压力和流速,实现电解液在探针针尖的定域流出,并且保证探针针尖处的压力满足设定要求。
26、通过上述设计方案,本发明可以带来如下有益效果:
27、1、本发明采用磁场辅助电沉积技术,能够加速沉积速率,提高沉积层的均匀性和致密性,并提高沉积层性能,因此在微纳米结构制造方面具有重要的应用潜力。
28、2、本发明通过实时监测探针针尖与沉积体之间的作用力,并通过微悬臂的变形来反应力的大小,将通过位置感知检测器psd的反馈实时与程序电压设定值进行比较,间断调整z轴电机的实时位置,从而实现对原子力探针的原子力伺服闭环控制,达到持续高质量沉积的效果。原子力探针进行的原子力伺服闭环控制,主要得益于位置感知检测器psd的精确反馈。弹性微悬臂的微小变形实现原子力探针金字塔针尖与样品之间的作用力精确检测。
29、3、本发明中经过原子力伺服闭环控制的原子力探针,在调控尺寸精度和表面粗糙度方面具有显著优势。可以通过控制软件设定电极之间的直流电压值设定不同的微悬臂触发直流电压值,实现高精度沉积,不会像弯液面约束电化学沉积出现竹节状的沉积结构,本发明能做到力、位移和压力的协调统一。
30、4、本发明对电解液的控制能够实现对金属原子析出过程的精确感知、增强增大沉积过程的稳定性和重现性、同时提升微区内体元空间构型位置精度、能够完成电化学沉积纳米级体元及微米级构型的高精度定域微增材制造,对提高微小尺度电化学增材的精度具有显著意义。
本文地址:https://www.jishuxx.com/zhuanli/20240726/117772.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表