一种电磁直驱六自由度解耦柔性纳米定位平台
- 国知局
- 2024-07-27 12:54:18
本发明涉及微纳米定位,具体涉及一种电磁直驱六自由度解耦柔性纳米定位平台。
背景技术:
1、六自由度纳米定位平台广泛应用于光学、生物医学、显微镜和芯片制造等诸多领域,如用于纳米压印光刻的模板基底对准调平装置、用于光纤对接的六自由度微操作机器人等。现有的六自由度纳米定位平台包括宏动和微动这两种结构,宏观尺度的振动和运动定位平台一般采用刚性的串联或并联机构,由电机或液压驱动,但常常因为摩擦力的问题出现分辨率低的状况;亚微米尺度的振动和运动定位平台则采用柔性铰链和压电驱动,但压电陶瓷驱动器输出位移较小,往往在0.01mm~0.1mm,无法完成大行程位移需求。
2、中国专利cn113125094 a,公开了一种基于柔性机构的六自由度微振动装置,该装置通过微震动的方式来实现六个自由度的移动。中国专利cn109502542a涉及一种基于柔顺并联机构的多自由度纳米定位平台,该平台采用纳米精度的冗余驱动,但结构形式过于复杂,且使用压电陶瓷驱动器使得平台行程较小。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷中的至少一种而提供一种电磁直驱六自由度解耦柔性纳米定位平台。该定位平台共有八个运动支链并联,四个水平分布运动支链驱动动平台产生前后、左右移动和水平面上的转动,四个垂直运动支链驱动动平台产生竖直方向的移动、俯仰转动及左右摆动。此外,本发明还在运动支链末端加入柔性球铰作为解耦装置,来降低输入输出以及各自由度方向上的耦合。
2、本发明的目的可以通过以下技术方案来实现:
3、基于此,设计人提出了一种电磁直驱六自由度解耦柔性纳米定位平台,这种纳米定位平台结构简单对称,采用音圈电机驱动器直接进行驱动,能在各个自由度方向上实现完全解耦,使其定位精度更高并且控制更加方便。
4、一种电磁直驱六自由度解耦柔性纳米定位平台,该定位平台包括底板和位于底板之上的动平台,以及位于底板和动平台之间的多个水平运动支链和多个垂直运动支链;
5、所述的水平运动支链包括水平支链安装支架、水平支链连接板、解耦机构和传动组件;
6、所述的水平支链安装支架一端固定在底板上,另一端与传动组件固定连接;所述的解耦机构一端与传动组件远离水平支链安装支架一端固定连接,另一端与水平支链连接板固定连接,所述的水平支链连接板远离解耦机构的一端与动平台固定连接;
7、所述的垂直运动支链包括垂直支链安装支架、解耦机构和传动组件;
8、所述的垂直支链安装支架一端固定在底板上,另一端与传动组件固定连接;所述的解耦机构一端与传动组件远离垂直支链安装支架固定连接,另一端与动平台固定连接。
9、更具体地,底板通过多个水平运动支链和多个垂直运动支链与动平台进行连接,保证定位平台的各个组成部分无间隙,实现动平台高精度运动。
10、进一步地,所述的传动组件包括刚性矩形框架、电机安装底块、电机安装块、音圈电机;所述的矩形框架内侧一端设有电机安装底块,相对的一端设有电机安装块;所述的音圈电机位于电机安装底块和电机安装块之间。更具体地,音圈电机有磁钢组件和线圈组件,音圈电机一端的磁钢组件和电机安装底块相连,音圈电机线圈组件与电机安装块相连。
11、进一步地,所述的水平运动支链和垂直运动支链均有4个。
12、进一步地,所述的水平运动支链围绕动平台中心旋转对称;分别位于所述底板1的四个角。所述的水平运动支链所在轴线相交围成的图形的面积大于0。
13、进一步地,所述的垂直运动支链绕动平台中心旋转对称;每一个所述的垂直运动支链的中心点位于同一高度。
14、更具体地,与水平运动支链相配合的音圈电机用于驱动水平运动支链带动动平台产生水平面上的前后、左右平移或竖直方向旋转;与垂直运动支链相配合的音圈电机用于驱动垂直运动支链带动动平台产生竖直方向的移动、俯仰转动或摆动。基于上述设计,音圈电机通过四个水平运动支链和四个垂直运动支链带动末端在空间内产生六个自由度的运动;多个水平运动支链和多个垂直运动支链绕动平台中心旋转对称,使整体结构的对称设置,提高了对称性,提高了运动的灵活性和准确性。
15、进一步地,所述的水平运动支链和垂直运动支链并联工作。
16、进一步地,所述的水平支链安装支架为l型刚性连接板,水平支链连接板和电机安装底块为刚性连接板。
17、进一步地,所述的垂直支链安装支架为夹角均为90°的w型刚性连接板。
18、进一步地,所述的解耦机构为柔性球铰。
19、进一步地,所述的柔性球铰为大行程柔性球铰。
20、与现有技术相比,本发明具有以下优点:
21、(1)本发明设计了一种由八个运动支链并联驱动的新型柔性纳米定位平台,采用八个运动支链并联,分别通过四组水平支链和四组垂直支链实现平面三自由度和空间三自由度运动;
22、(2)本发明采用基于柔性梁的大行程球形铰链以及整体对称结构,来降低驱动器输入输出和各自由度方向上的耦合,提升平台的行程范围和解耦性能;
23、(3)本发明采用音圈电机等电磁驱动器直接驱动并联柔性机构实现六自由度纳米定位,具有结构形式简单,运动行程大,便于加工装配以及成本低等优点。
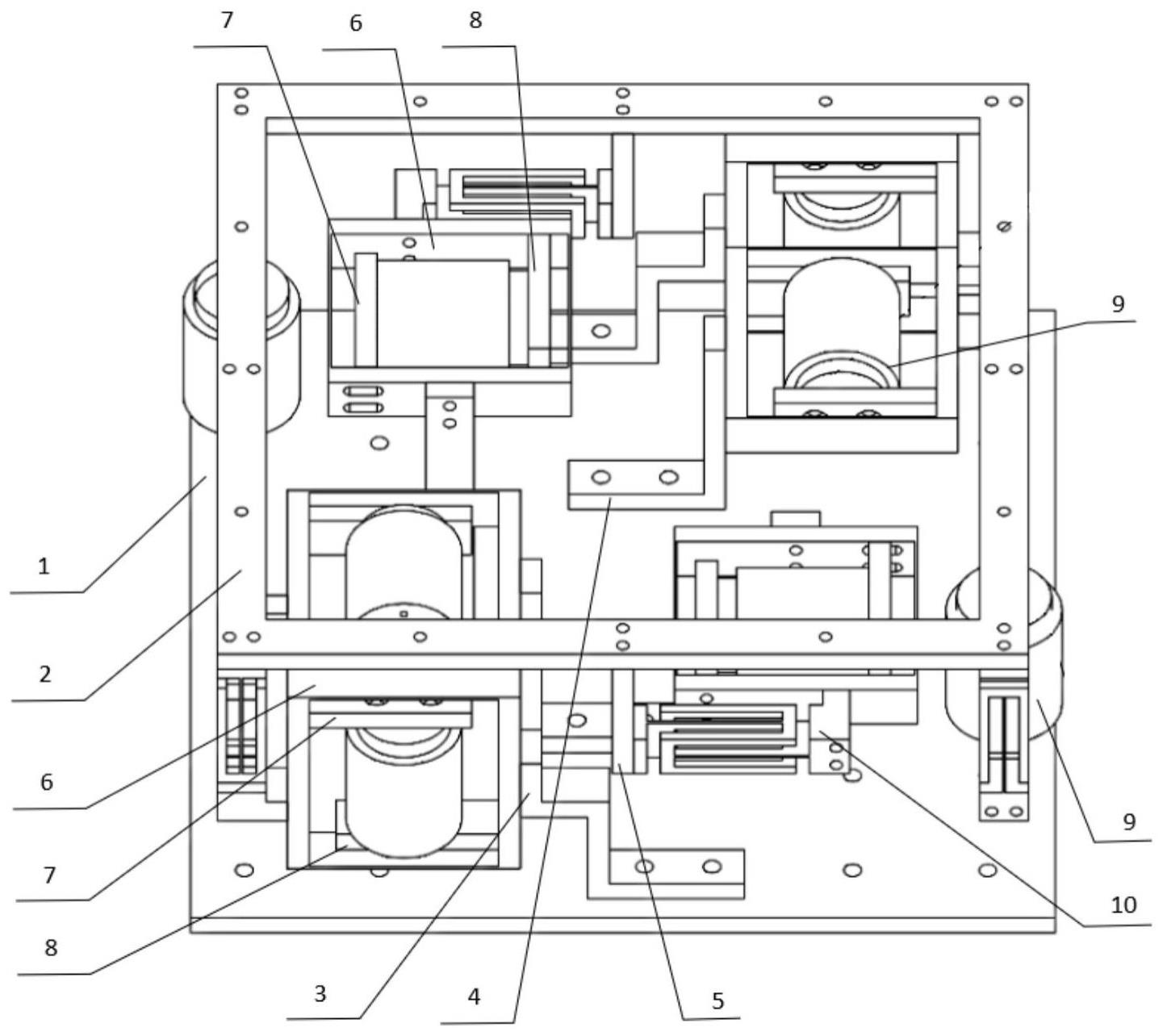
技术特征:1.一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,该定位平台包括底板(1)和位于底板(1)之上的动平台(2),以及位于底板(1)和动平台(2)之间的多个水平运动支链和多个垂直运动支链;
2.根据权利要求1所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的传动组件包括矩形框架(6)、电机安装底块(7)、电机安装块(8)、音圈电机(9);
3.根据权利要求1所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的水平运动支链和垂直运动支链均有4个。
4.根据权利要求3所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的水平运动支链围绕动平台(2)中心旋转对称;所述的水平运动支链所在轴线相交围成的图形的面积大于0。
5.根据权利要求3所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的垂直运动支链绕动平台(2)中心旋转对称;每一个所述的垂直运动支链的中心点位于同一高度。
6.根据权利要求1所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的水平运动支链和垂直运动支链并联工作。
7.根据权利要求1所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的水平支链安装支架(4)为l型板。
8.根据权利要求1所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的垂直支链安装支架(3)为夹角均为90°的w型板。
9.根据权利要求1所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的解耦机构(10)为柔性球铰。
10.根据权利要求9所述的一种电磁直驱六自由度解耦柔性纳米定位平台,其特征在于,所述的柔性球铰为大行程柔性球铰。
技术总结本发明涉及一种电磁直驱六自由度解耦柔性纳米定位平台,该定位平台包括底板(1)和位于底板(1)之上的动平台(2),以及位于底板(1)和动平台(2)之间的多个水平运动支链和多个垂直运动支链。与现有技术相比,本发明共有八个运动支链并联,四个水平分布运动支链驱动动平台产生前后、左右移动和水平面上的转动,四个垂直运动支链驱动动平台产生竖直方向的移动、俯仰转动及左右摆动。此外,本发明还在运动支链末端加入柔性球铰作为解耦装置,来降低输入输出以及各自由度方向上的耦合。技术研发人员:谢超,赖磊捷受保护的技术使用者:上海工程技术大学技术研发日:技术公布日:2024/1/12本文地址:https://www.jishuxx.com/zhuanli/20240726/124056.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。