一种基于外系统缓解风机疲劳载荷的动态输入控制策略
- 国知局
- 2024-07-27 13:12:28
本发明属于风机控制,具体涉及一种基于外系统缓解风机疲劳载荷的动态输入控制策略。
背景技术:
1、近些年来,风力发电机的制造趋势是增大尺寸和额定功率,因为增大风机的尺寸可以使其从风中提取更多的能量。然而,风机的尺寸越大,也会导致风机组件的结构应力和疲劳载荷的增加,从长远来看,这将导致更大的维护和运行成本。为了降低风能的平准化成本,风机的控制器设计目标需是减轻风机结构的疲劳载荷,同时尽可能提高发电量。
2、为了提高风机的发电效率,目前的研究中已经提出了许多反馈控制策略。然而对风机只进行反馈控制效果可能并不好,因为执行器动作的延迟将导致风机仅对已经影响系统状态的风速做出响应。为了解决这一缺点,提出了激光雷达(lidar)测风技术,在风与叶片相互作用之前提供即将到来的风速估计,从而将前馈控制引入到风机系统以补偿风速扰动并提高系统性能。
3、在针对缓解风机疲劳载荷的控制方案研究中,非线性模型预测控制(nonlinearmodel predictive control,nmpc)可以降低湍流风和极端阵风下风机的结构疲劳载荷。然而,nmpc的一个关键限制是其庞大的计算成本,这使得它无法在传统的工业控制器上实时使用。自适应动态规划(adaptive dynamic programming,adp)技术也可以减少风机的疲劳载荷,但adp的学习过程需要大量的计算能力和较高的采样率,可能会超出物理设备的限制。精确输出调节(exact output regulation,eor)控制方法可以在减少疲劳载荷的同时最大化发电量,但该算法不能从理论上解释控制器降低疲劳载荷的原因;此外,该算法仅在平均风速点处针对风机系统进行线性化处理,使得所设计的控制器在风机的工作点变化时便不再适用。因此需要设计一种计算复杂度低,可解释性强,在降低风机疲劳载荷的同时提高发电量的控制算法。
技术实现思路
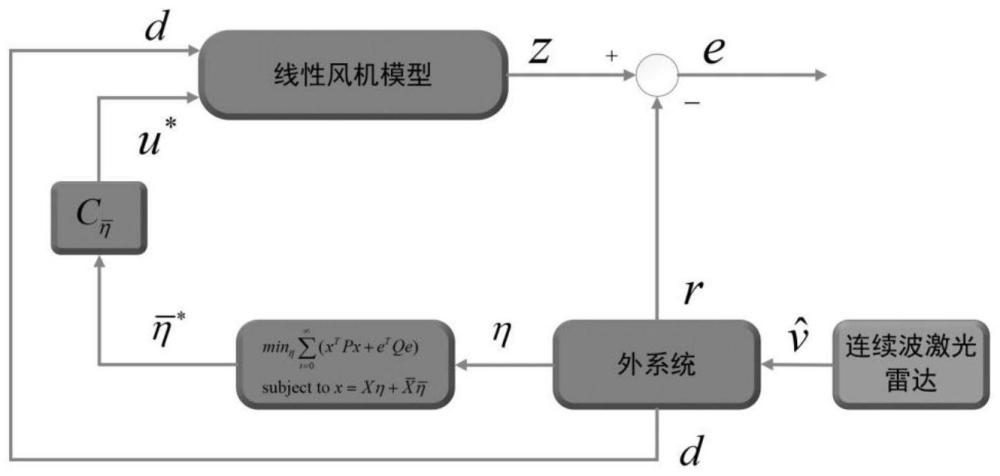
1、为了弥补现有技术的不足,本发明旨在提供一种基于外系统缓解风机疲劳载荷的动态输入控制策略,通过一个外系统来模拟线性变参数风机系统的外部干扰信号和风机被控输出需要跟踪的参考信号,从而将前馈加反馈控制引入到风机系统以补偿风速扰动并提高系统性能,实现在降低风机疲劳载荷的同时最大化发电功率。为实现该目的,本发明的具体技术方案如下:
2、所述的一种基于外系统缓解风机疲劳载荷的动态输入控制策略,具体步骤如下:
3、s1.针对非线性风机数学模型在不同工作点进行线性化,得到线性变参数风机模型;
4、s2.基于线性变参数风机模型引入外系统,利用外系统的输出信号r和d来模拟线性变参数风机模型的外部干扰信号和风机被控输出z需要跟踪的参考信号;
5、s3.利用外系统的状态η求解最优控制问题,计算出最优控制率u*;
6、s4.通过连续波激光雷达得到有效风速的估计值
7、s5.采用自回归模型来拟合连续波激光雷达提供的风速的估计值然后基于有效风速的估计值来搭建外系统模型,并确保误差信号e最终趋于零,即风机的外部干扰信号d被渐近抑制,且被控输出z渐近跟踪期望的参考信号r。
8、进一步地,所述步骤s1中采用的非线性风机数学模型为:
9、
10、
11、
12、
13、
14、其中,ωr和ωg是转子转速和发电机转速,δ是传动轴扭转,ng是变速箱传动比,ta和tg是气动转矩和发电机转矩,jr和jg是转子惯量和发电机惯量,ds和ks是低速轴的阻尼系数和弹性系数,ξ和ft是塔架的位移和其受到的推力,mt、dt和kt分别是塔架的质量、阻尼系数和弹性系数,τt和tg,ref是时间常数和参考发电机转矩;
15、基于风机系统具有六个状态u=tg,ref为系统控制输入,d=v为不可控扰动输入,为了便于设计控制器,在不同的风速点周围对非线性风机模型进行线性化,从而得到了一个线性变参数系统,该系统具有如下形式:
16、
17、
18、
19、其中,和分别表示稳态状态、稳态输入和当前工作点风速;和分别表示风机系统的测量输出和被控输出;故系统状态矩阵为:
20、
21、其中,和测量输出和被控输出矩阵为:
22、cz=[1 0 0 0 0 0]
23、考虑零阶保持器,采样周期为t,则线性变参数风机模型的离散形式为:
24、xk+1=a1xk+b1uk+b2dk
25、yk=cyxk
26、zk=czxk
27、其中,矩阵a1、b1和b2分别是矩阵ap、bp和hp的离散变换形式。
28、进一步地,所述步骤s2中,外部干扰信号dk和参考信号rk是由一个已知的外系统生成的,跟踪误差信号ek=zk-rk表示被控输出zk与参考信号rk之间的差值,该外系统可表示为:
29、ηk+1=aηηk
30、dk=cdηk
31、rk=crηk
32、其中,ηk为外系统的状态量,aη为外系统的状态矩阵,cd和cr分别表示外部扰动信号和参考信号的输出矩阵。
33、进一步地,所述步骤s3中考虑控制输入信号uk由下面的动态策略生成:
34、
35、
36、其中,矩阵和的构造条件是使得动态策略系统是可观测的,系统状态xk可以写成关于外系统状态ηk和控制输入信号状态的线性函数,即:
37、
38、其中矩阵x和满足:
39、xaη=a1x+b2cd
40、
41、此外,zk和ek都是关于ηk和的线性函数:
42、
43、
44、利用连续波激光雷达在线提供的外系统状态ηk,然后通过求解优化问题:
45、
46、
47、得到最优控制输入信号状态并进一步计算得出最优控制输入p和q是给定的对称正定矩阵。
48、进一步地,所述步骤s5中采用自回归模型来拟合连续波激光雷达提供的风速信号然后引入线性时不变差分方程来模拟外系统动力学,其表示为:
49、
50、
51、其中,为连续波激光雷达在采样时刻k测得的风速,为当前工作点的风速,ak为系统系数,n为外系统动态的阶数。
52、进一步地,选择n=3来建立外系统的动态,故外系统的动态可以表示为:
53、
54、其中,
55、
56、使用递推最小二乘法来求出最优系统系数
57、由于系统输入扰动为实测风速与工作点风速之间的偏差,即故扰动信号的输出矩阵cd为:
58、cd=[100];
59、在低风速运行区域下,系统被控输出的跟踪目标为最优转子转速,即故参考信号的输出矩阵cr为:
60、
61、进一步地,基于外系统的动态输入控制器简称为dic,发电机转矩动态中的时间常数τt=0.01s,权重矩阵p和q为:
62、
63、q=100000。
64、与现有技术相比,本发明有以下优点:该方法在降低风机疲劳载荷的同时最大化发电功率,不仅降低了求解最优控制问题的复杂性,而且从理论上解释了控制器可以减轻风机传动轴和塔架的疲劳载荷的原因。通过外系统来模拟线性变参数风机系统的外部干扰信号和风机被控输出需要跟踪的参考信号,从而将前馈加反馈控制引入到风机系统以补偿风速扰动并提高了系统性能;采用自回归模型对连续波激光雷达提供的风速信号进行拟合,从而便于利用连续波激光雷达的测量数据来构建外系统动力学模型。在基于外系统的动态输入控制器dic作用下塔架的位移变化率比eor和pi都要平稳,与eor和pi控制器相比,dic分别使塔架的疲劳载荷降低了12.9%和31.5%,传动轴的疲劳载荷降低了47.3%和88.5%;此外,与eor和pi控制器相比,dic在平均发电量上分别牺牲了1.4%和提高了4.3%。
本文地址:https://www.jishuxx.com/zhuanli/20240726/125352.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表