具有浮动涡轮机的风力发电场的控制的制作方法
- 国知局
- 2024-07-27 13:31:49
本发明涉及一种控制浮动风力发电场中的尾流的方法。它还涉及一种被配置为执行这种方法的控制系统。
背景技术:
1、浮动风力发电场具有显著增加可用于海上风力发电场的海域的潜力,因为浮动风力涡轮机可以布置在如下区域中,在该区域中底部固定式风力涡轮机的实施是不可能的。然而,浮动风力涡轮机暴露于尾流效应,由于浮动运动,与底部固定式风力涡轮机的风力发电场中发生的那些动力学相比,浮动风力涡轮机的动力学更复杂。因此,借助于现有方法极难减少尾流效应。通常,当风力发电场中的排与进入的风的角度紧密地对准时,发生尾流效应。前面的上游风力涡轮机阻挡流入风并干扰到达下游风力涡轮机的风。风被操纵成使得引起被称为风力不足的减小的风速和被称为风湍流的增加的风速变化。因此,下游风力涡轮机受到更大湍流和力量更小的风的影响。风力不足与发电场级别上的减少的功率产生有关,而风湍流与增加的负载有关。增加的负载是风湍流导致下游风力涡轮机的机械负载中的振动的结果,并且导致更高的磨损。
2、文献ep3783221a1涉及一种在风力发电场中重新定位浮动风力涡轮机的控制系统。然而,重新定位浮动风力涡轮机可能需要额外的实施努力,因为风力涡轮机需要是可航行的。
3、文献dk201470456a1描述了多个海上风力涡轮机相对于彼此的动态定位。通过测量风况并使用基于风力涡轮机的几何布置估计尾流场的模型来获得关于尾流场的信息。至少两个浮动风力涡轮机放置在尾流场的影响最小化所在的位置处。
技术实现思路
1、因此,需要减轻上述缺点中的至少一些,并且需要在风力发电场级别上减少尾流引起的性能损失和尾流引起的负载增加。
2、这种需要由独立权利要求的特征来满足。从属权利要求描述了本发明的实施例。
3、根据本发明的实施例,提供了一种控制浮动风力发电场中的尾流的方法。所述风力发电场包括能够在操作期间改变位置和/或取向的多个浮动风力涡轮机。所述多个浮动风力涡轮机包括上游风力涡轮机和下游风力涡轮机,其中,所述下游风力涡轮机位于所述上游风力涡轮机的下游,使得所述上游风力涡轮机的尾流对所述下游风力涡轮机具有影响。所述方法包括:监测所述多个浮动风力涡轮机中的至少一个处的风况以生成至少第一所监测的风况;监测指示所述多个浮动风力涡轮机中的至少一个的位置和/或取向的一个或多个参数以生成至少第一所监测的浮动运动状态;以及基于参数集来生成控制参数,所述参数集至少包括所述第一所监测的风况和所述第一所监测的浮动运动状态。所述控制参数被从所述参数集导出,其中,所述导出考虑了上游风力涡轮机的浮动运动参数对所述上游风力涡轮机的尾流的影响,并且考虑了所述上游风力涡轮机的尾流对下游风力涡轮机的影响。所述控制参数被导出以便减小对所述下游风力涡轮机的尾流影响。所述方法还包括:基于所述控制参数来控制所述多个浮动风力涡轮机中的至少一个的操作。所述第一所监测的浮动运动状态可以包括指示所述至少一个浮动风力涡轮机的浮动运动的参数
4、结果,在风力发电场级别上提高了功率生产或性能。同时,风湍流减少,并且因此每个浮动风力涡轮机的负载以及与其相关联的磨损减少。此外,使控制参数的生成基于风力涡轮机的动态运动可提高尾流控制的效率和准确度。特别地,浮动风力涡轮机的运动(例如由海浪涌动引起的垂荡运动或横摇运动的幅值)可例如由于尾流蜿蜒而显著地改变浮动风力涡轮机的尾流。这可以导致更宽的有效尾流轮廓,但是也可以例如通过由于与其自身尾流的相互作用而产生额外的湍流来提高尾流恢复率。因此,可能需要较少的控制动作来减少尾流影响。通过考虑浮动风力涡轮机的运动状态,尾流控制可以因此变得更高效,并且可以提高风力发电场的总体效率。
5、比较而言,现有技术依赖于风力发电场中的风力涡轮机的布置的几何结构,并且由现有技术执行的控制对风力涡轮机重新定位以最小化尾流影响(例如,如在ep3783221a1中描述的)。由于这种几何考虑是基于静态绝对位置和旋转角的,现有技术提供了与“使用风力涡轮机的浮动运动状态作为尾流控制的基础”相悖的教导。特别是通过使用中心或平均位置,现有技术的处理去除了所有动态信息,并且因此使得不可能利用这种信息。现有技术也没有教导在尾流优化方案中如何可以可能地处理这种浮动运动状态,使得技术人员将不会考虑在用于重新定位浮动风力涡轮机的现有技术控制方法中使用相应的动态运动状态。
6、例如,监测可以由传感器、传感系统和基于模型或滤波器的监测系统中的至少一者来执行,但不限于此,所述监测系统例如可以是状态观测器、卡尔曼滤波器等。监测还可以包括信号预处理和后处理,例如滤波。
7、监测可以包括估计至少第一所监测的风况和/或至少第一所监测的浮动运动状态。优选地,估计是基于所测量的输入的,并且该方法还包括(借助于传感器单元)测量所测量的输入。
8、监测多个浮动风力涡轮机中的至少一个的风况可包括测量在多个浮动风力涡轮机中的至少一个处的风况,和/或监测指示多个浮动风力涡轮机中的至少一个的位置和/或取向的一个或多个参数可包括测量指示多个浮动风力涡轮机中的至少一个的位置和/或取向的一个或多个参数。
9、应当清楚,减小对至少一个浮动风力涡轮机的尾流影响增加了风力发电场的总体性能/功率生产。可能的是,一些风力涡轮机(例如上游风力涡轮机)的性能可能降低,以便降低对其他风力涡轮机(例如下游风力涡轮机)的尾流影响。这可例如通过应用艏摇偏移和/或叶片变桨偏移来实现。还可能的是,可以增加对多个浮动风力涡轮机的子集的尾流影响,以便减少对未被该子集包括的其他风力涡轮机的尾流影响。然而,可以减小对风力发电场的至少一个浮动风力涡轮机的尾流影响,以提高风力发电场的性能。相应地,可以减小对风力发电场的至少一个浮动风力涡轮机的尾流影响,以便减小由于尾流引起的风湍流而在风力发电场级别上的负荷。因此,应当清楚,控制参数可包括多个控制参数,每个控制参数与风力发电场的风力涡轮机中的一个相关联并且由其执行。然而,多个控制参数所包括的控制参数的数量可能不等于风力涡轮机的数量。
10、根据实施例,针对其生成所述第一所监测的浮动运动状态的所述至少一个浮动风力涡轮机是所述上游风力涡轮机,并且针对其生成所述第一所监测的风况的所述至少一个风力涡轮机是所述上游风力涡轮机。所述方法优选地还包括:监测所述下游风力涡轮机(120)处的第二浮动运动状态和第二风况,以便生成第二所监测的浮动运动状态和第二所监测的风况。所述第二所监测的浮动运动状态和所述第二所监测的风况被所述参数集包括在内。
11、浮动运动参数可以被第一所监测的浮动运动状态包括在内。
12、所述方法还可以包括:监测多个浮动风力涡轮机中的每个的风况和浮动运动状态,以生成相应的所监测的风况和相应的所监测的浮动运动状态。相应的所监测的风况和相应的浮动运动状态可被所述参数集包括在内。
13、监测多个浮动风力涡轮机处的风况和浮动运动增加了风力发电场中的风况的分布的细节水平,并且因此增加了尾流减少的效率。
14、优选地,可以仅对处于操作中的这种浮动风力涡轮机执行对风况和浮动运动状态的监测。例如,对于处于缩减(curtailment)或未操作的这种浮动风力涡轮机,可以不监测或以受限的方式监测风况和浮动运动状态。
15、根据实施例,监测风况包括监测表示流入风向、风湍流和风速中的至少一者的一个或多个风参数。
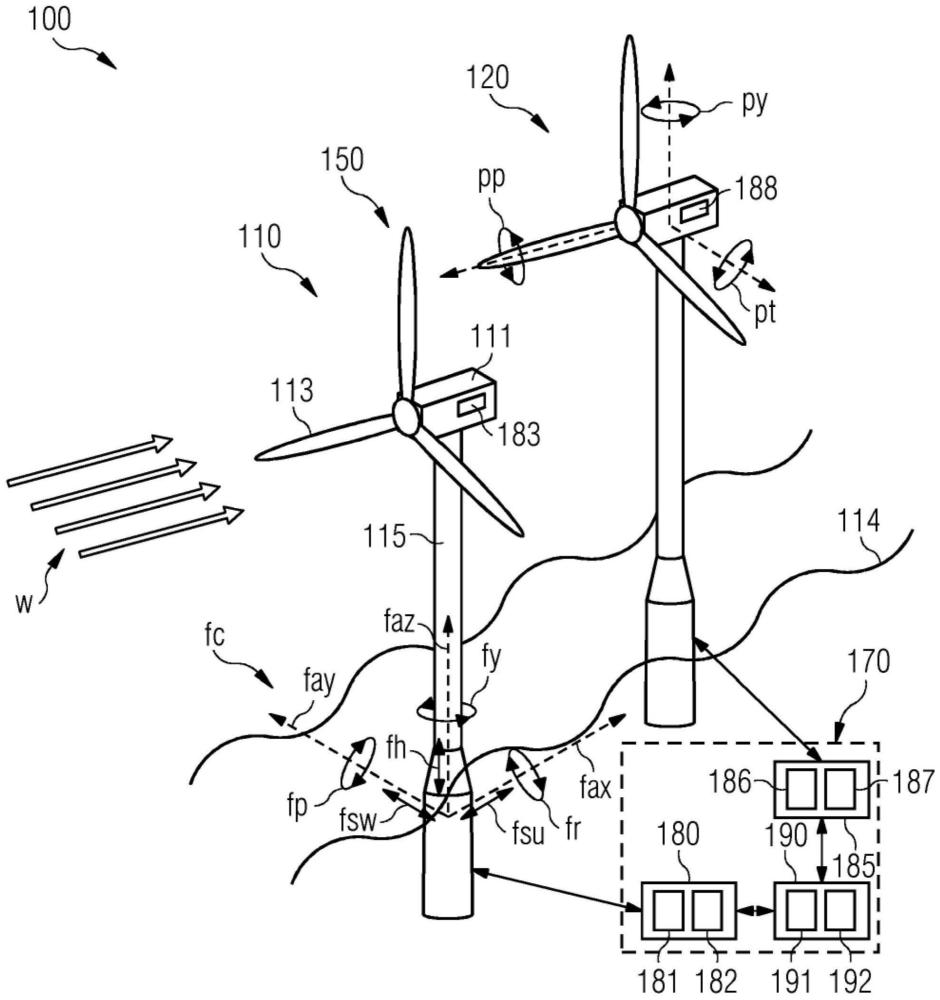
16、每个风力涡轮机可包括浮动基座,相应的风力涡轮机安装在该浮动基座上。浮动基座可以移动。浮动基座和相应的浮动风力涡轮机的运动可以分成六个单独的自由度,即,三个平移,包括纵荡、横荡和垂荡,以及三个旋转,即横摇、纵摇和艏摇。平移运动在本文中可被称为浮子纵荡运动、浮子横荡运动和浮子垂荡运动,并且角运动在本文中可被称为浮子横摇运动、浮子纵摇运动和浮子艏摇运动。由所述浮子平移运动中的一个所覆盖的平移在本文中可相应地被称为浮子纵荡、浮子横荡和浮子垂荡,并且由所述浮子角运动中的一个所覆盖的旋转角可相应地被称为浮子横摇角、浮子纵摇角和浮子艏摇角。浮动风力涡轮机的位移可以由所述平移中的一个或多个组成,并且浮动风力涡轮机的倾斜可以由所述旋转中的一个或多个组成。浮动风力涡轮机可以包括机舱,其中,机舱可以通过控制特定的角运动而旋转。特别地,它可以旋转由所述控制特定的角运动覆盖的旋转角,其中,旋转角可以是由浮动风力涡轮机的机舱围绕相应的偏航和俯仰轴线的角运动所覆盖的机舱偏航角和/或机舱俯仰角。浮动风力涡轮机还可包括转子,转子包括转子叶片。附加地或替代地,控制特定的角运动可以包括与浮动风力涡轮机的转子叶片围绕转子叶片的纵向轴线的旋转相关的参数,例如叶片变桨(角)。至少一个转子叶片的旋转(即叶片变桨角)可被风力涡轮机的受控自由度包括在内。转子叶片可以因此通过控制特定的角运动而移动。
17、根据实施例,监测所述浮动运动状态包括监测表示至少一个方向上的平移运动和/或围绕至少一个旋转角的角运动的一个或多个运动参数,其中,所述至少一个方向优选地选自浮子纵荡方向、浮子横荡方向和浮子垂荡方向,并且其中,所述至少一个角优选地选自浮子艏摇角、浮子横摇角和浮子纵摇角。
18、根据实施例,监测所述浮动运动状态包括监测表示至少一个方向上的平移运动和/或围绕至少一个旋转角的角运动的一个或多个运动参数,所述至少一个旋转角优选地选自浮子艏摇角、浮子横摇角和浮子纵摇角。所述方法还包括:基于所述一个或多个运动参数确定所述浮动风力涡轮机的运动幅值、运动频率、位移和/或倾斜中的至少一者。
19、例如,可以基于频谱或其相应的幅值和相位谱来确定所监测的参数的幅值和/或频率,所述频谱或其相应的幅值和相位谱是从所监测的参数的时间序列导出的。例如,它可以通过对时间序列应用快速傅立叶变换来导出。
20、作为示例,所监测的浮动运动状态可指示至少一个风力涡轮机的动态运动。所监测的浮动运动状态可包括至少一个风力涡轮机的平移运动和/或角运动(例如,沿上述方向/角度中的一个或多个)的幅值和/或频率。幅值和/或频率可以从一个或多个所监测的参数的相应时间序列导出。运动可以是(近似)周期性运动,例如沿垂荡方向的上下运动,或者围绕浮子横摇角的周期性横摇运动。从相应位置/角度的相应时间序列,可以导出幅值和/或频率。因此可以考虑由于风力涡轮机的动态运动而产生的尾流效应(例如尾流蜿蜒,其导致更宽的有效尾流),这可以导致风力发电场的改进的操作。
21、可以在一段时间内监测指示多个浮动风力涡轮机中的至少一个的位置和/或取向的一个或多个参数,以获得一个或多个参数的相应时间序列。在一些示例中,第一所监测的浮动运动状态可包括指示所述一或多个参数随时间的导数或指示所述一或多个参数随时间的变化的参数。
22、优选地,确定所述浮动风力涡轮机的位移和/或倾斜包括:监测所述浮动风力涡轮机的倾斜和位移中的至少一者随时间的数据序列,并且对相应数据序列求平均以便生成平均倾斜和平均位移中的至少一者。
23、更优选地,通过低通滤波来执行求平均。
24、根据实施例,所述方法还包括:监测多个浮动风力涡轮机中的至少一个的操作状态以生成至少第一所监测的操作状态。所监测的操作状态进一步被所述参数集包括在内。
25、操作状态可包括表示至少一个浮动风力涡轮机的操作状态的一个或多个参数,例如,可表示机舱偏航角、叶片变桨角或机舱俯仰角的实际控制值,或者表示浮动风力涡轮机正在操作中/未操作或在缩减中的参数。它还可以包括转子或机舱的运动参数,或者与至少一个浮动风力涡轮机的功率产生相关的参数。它还可以包括地点特定的信息,例如表示风力发电场的布局的参数。
26、针对其生成所述第一所监测的操作状态的所述至少一个浮动风力涡轮机可以是所述上游风力涡轮机。所述方法可以优选地进一步包括:监测所述下游风力涡轮机处的第二操作状态,以生成第二所监测的操作状态。所述第二所监测的操作状态可以被所述参数集包括在内。
27、所述方法还可以包括:监测所述多个浮动风力涡轮机中的每个的操作状态,以生成相应的所监测的操作状态。所述相应的所监测的操作状态可以被所述参数集包括在内。
28、例如,可以考虑浮动风力涡轮机的操作状态以生成最小操纵努力的控制参数,即,优选如下的控制参数,该控制参数最小化在风力发电场级别上的总操纵努力,该总操纵努力源自当执行控制参数时每个浮动风力涡轮机所需的操纵努力。这种最小努力控制参数将因此最小化用于执行控制参数的所需功率,并且因此进一步提高发电场级别的效率。
29、根据实施例,所述参数集被减少为经减少的参数集。所述经减少的参数集的参数比不被所述经减少的参数集包括的至少一个参数对所述风力发电场(100)的性能具有更大的影响。优选地,所述控制参数基于所述经减少的参数集来生成。减少参数集可以构成所述方法的一部分,或者所述方法可以利用预先确定的经减少的参数集来操作,即,仅监测或导出经减少的参数集的参数。
30、这种参数减少将参数集减少到最相关的参数,并且因此减少了用于生成控制参数所需的计算努力。
31、根据实施例,借助于查找表和/或风力发电场尾流模型来执行所述控制参数从所述参数集的所述导出。
32、查找表和/或风力发电场尾流模型可以基于输入参数集返回控制参数。查找表可以包括多个控制参数,所述多个控制参数例如可以基于经验数据来获得。风力发电场尾流模型可以例如是基于热力学和/或流体力学模拟风力发电场中的尾流影响的模拟模型。
33、查找表和/或风力发电场尾流模型允许快速且可靠地生成控制参数。
34、根据实施例,所述查找表是基于风力发电场尾流模型获得的预先确定的查找表。所述查找表被配置为针对所述参数集的每种成分提供如下的控制参数,该控制参数针对相应的参数集使所述风力发电场中的尾流影响最小化。所述查找表可以替代地被配置为针对所述参数集的每种成分提供如下的控制参数,该控制参数针对相应的参数集使风力发电场的性能最大化,使下游风力涡轮机经历的湍流最小化或者实现上述两者(例如,使用优化的加权平均)。
35、所述查找表可以包括多个查找表,每个查找表与多个浮动风力涡轮机中的一个相关联。
36、替代地或另外,所述查找表可以包括多个查找表,并且所述参数集可以包括参数的第一和第二部分。所述方法还可以包括:基于所述参数集的第一部分预先选择多个查找表中的所选定的查找表。可基于所述参数集的第二部分和所选定的查找表来生成控制参数。
37、例如,可以基于浮动运动状态和风湍流从多个查找表的子集来选择查找表。所述子集可包括与风力发电场的多个风力涡轮机中的一个相关联的多个查找表。控制参数可以基于输入到所选定的查找表的风向、风速、叶片变桨和机舱偏航来导出。
38、这种级联的查找表允许更简单和更清楚的数据结构,因此可以以更少的努力来维护该数据结构。
39、根据实施例,生成所述控制参数是基于所述查找表的,并且所述方法还包括:如果输入到所述查找表的所述参数集的参数包括在所述查找表的两个预定值之间的中间值,则逼近所述控制参数。优选地,所述逼近包括应用插值并且更优选地应用多变量插值。
40、根据实施例,生成所述控制参数是基于所述查找表的,并且所述参数集包括受不确定性影响的参数。所述受不确定性影响的参数包括受参数不确定性影响的实际值。在基于所述受不确定性影响的参数的所述实际值和表示所述参数不确定性的参数来假设所述参数的可能值的范围时,所述查找表已基于所述风力发电场尾流模型生成,使得生成如下的控制参数,该控制参数使所述浮动风力发电场的性能的期望值最大化。
41、这样生成的查找表允许所述方法处理所述参数集的极难测量的参数,即,该参数的测量受到不确定性的影响或者不能测量。查找表仍然响应于受不确定性影响的输入而鲁棒地提供控制参数。这种鲁棒的查找表可以离线生成,例如在相应的浮动风力涡轮机启动之前。然而,也可能的是,在相应的浮动风力涡轮机的操作期间迭代地更新查找表。
42、根据实施例,生成所述控制参数是基于所述风力发电场尾流模型的,并且所述风力发电场尾流模型被配置为针对所述参数集的每种成分提供如下的控制参数,该控制参数通过针对相应的参数集减小所述风力发电场中的尾流影响来最大化风力发电场性能。特别地,尾流影响可以被减小以便最大化风力发电场的性能(例如,功率产生)和/或以便减小风力涡轮机上的负载。因此,风力发电场尾流模型可以被配置为针对参数集的每种成分提供如下的控制参数,该控制参数针对相应的参数集最大化风力发电场的性能和/或减少风力涡轮机上的负载。
43、根据实施例,生成所述控制参数被迭代地执行,特别是每半分钟直到每10分钟,并且甚至更特别地每2分钟。
44、根据实施例,生成所述控制参数是基于所述风力发电场尾流模型的,并且所述参数集至少包括受不确定性影响的参数(901),所述受不确定性影响的参数包括受参数不确定性影响的实际值。所述方法还包括:基于所述受不确定性影响的参数的实际值和表示所述参数不确定性的参数,导出所述参数的可能值的范围。基于所述范围生成所述控制参数,使得所述控制参数使所述风力发电场的总体性能的期望值最大化。
45、根据实施例,所述浮动运动状态包括浮子垂荡幅值、浮子垂荡位移、浮子纵荡幅值、浮子纵荡位移、浮子横荡幅值、浮子横荡位移、浮子横摇幅值、浮子横摇倾斜、浮子纵摇幅值、浮子纵摇倾斜、浮子艏摇幅值、浮子艏摇倾斜中的至少一者。所述浮动运动状态可以包括浮动风力涡轮机在浮子垂荡、浮子纵荡和浮子横荡轴线中的至少一者的方向上的静态位置和动态运动两者,或者浮动风力涡轮机围绕浮子垂荡、浮子纵荡和浮子横荡轴线中的至少一者旋转的静态位置和动态运动两者。换句话说,浮动运动状态可包括指示至少一个浮动风力涡轮机的动态运动的一个或多个参数,特别是指示至少一个浮动风力涡轮机的一个或多个平移和/或旋转运动,例如至少一个或两个(例如三个)平移运动和至少一个或两个(例如三个)旋转运动的一个或多个参数。
46、根据实施例,所述控制参数至少包括用于调整待操纵的浮动风力涡轮机的叶片变桨、待操纵的浮动风力涡轮机的转子速度、待操纵的浮动风力涡轮机的机舱偏航角和待操纵的浮动风力涡轮机的机舱俯仰角中的至少一者的命令。待操纵的浮动风力涡轮机可包括转子,并且另外地或替代地,所述控制参数至少包括用以在转子上施加俯仰力矩和在转子上施加偏航力矩中的至少一者的命令。待操纵的浮动风力涡轮机定位在一位置处,并且附加地或替代地,所述控制参数包括重新定位待操纵的浮动风力涡轮机的位置的命令。
47、在示例中,风力涡轮机(例如,上游风力涡轮机)可保持在其位置,并且基于控制参数控制操作可以包括:(直接)控制该位置处的尾流的方向、该位置处的尾流强度和尾流在该位置处沿其有效的尾流距离中的至少一者。这可通过改变(上游)风力涡轮机的操作状态而发生,特别是在保持风力涡轮机(特别是其浮动基座)的位置和/或取向的同时。风力涡轮机(例如其浮动基座)的位置和/或取向可例如(至少基本上)借助于系泊系统来保持。改变操作状态以使尾流转向可例如包括改变风力涡轮机的艏摇偏移。
48、可以提供接口,其允许将所生成的控制参数应用于已经存在的控制架构,所生成的控制参数可以是参数偏移或参数校正因子,例如机舱偏航偏移或机舱偏航校正因子。例如,机舱偏航偏移可被添加到相应机舱偏航控制的机舱偏航参考值,以修改风力涡轮机的机舱偏航参考值。相应地,机舱偏航校正因子可与机舱偏航参考值相乘以便修改机舱偏航参考值。
49、这允许将该方法简单地集成到风力发电场的当前控制架构中。特别地,可以容易地改装已经架设的风力发电场。
50、根据实施例,所述方法进一步包括:对所述参数集的至少一部分进行数据分箱,其中,所述数据分箱的结果被所述参数集包括在内。优选地,所述数据分箱包括以下中的至少一者:将所监测的浮动运动状态映射到浮动运动状态箱范围上和将所监测的风况映射到风况箱范围上。
51、对参数集的参数进行数据分箱降低了参数的分辨率,并且因此对参数集的一部分进行数据分箱降低了用于生成所述控制参数所需的计算努力。
52、应当清楚,在多维数据表示的情况下,执行多维数据分箱。此外,应当清楚,数据分箱还可以针对单个参数来执行或者针对被参数集包括的参数的组合来执行,并且特别地针对浮动运动状态或风况的参数来执行,例如针对浮子纵摇、浮子艏摇、浮子横荡幅值或风湍流强度来执行。
53、根据本发明的实施例,提供了一种用于控制浮动风力发电场中的尾流的控制系统。所述风力发电场包括能够在操作期间改变其位置和/或取向的多个浮动风力涡轮机,所述多个浮动风力涡轮机包括上游风力涡轮机和下游风力涡轮机。所述下游风力涡轮机位于所述上游风力涡轮机的下游,使得所述上游风力涡轮机的尾流对所述下游风力涡轮机具有影响。所述控制系统包括被配置为执行本文描述的任何方法的处理单元。
54、控制系统还可以包括第一监测单元和第二监测单元,第一监测单元被配置成监测多个浮动风力涡轮机中的至少一个处的风况以生成至少第一所监测的风况,第二监测单元被配置成监测多个浮动风力涡轮机中的至少一个处的浮动运动状态以生成至少第一所监测的浮动运动状态。
55、控制系统可以例如包括处理单元和存储器,所述存储器存储控制指令,所述控制指令在由控制系统的处理单元执行时使所述控制系统执行本文描述的任何方法。处理单元例如可以包括数字信号处理器、专用集成电路、现场可编程门阵列、微处理器等。
56、存储器可以包括ram、rom、闪存、硬盘驱动器等。
57、控制系统可以包括多个控制系统和主控制系统,其中,所述多个控制系统中的每个可以与所述多个浮动风力涡轮机中的一个通信地联接或被包括在所述多个浮动风力涡轮机中的一个中,并且进一步与所述主控制系统通信地联接。多个控制系统和主控制系统中的每一者可以包括处理单元和存储单元。控制系统可以被配置为执行本文描述的任何方法,其中,可以在多个控制系统和主控制系统上分布地执行所述方法的步骤。
58、根据本发明的实施例,提供了一种用于控制浮动风力发电场中的尾流的计算机程序,其中,所述计算机程序包括控制指令,所述控制指令在由处理单元执行时使处理单元执行本文所述的任何方法。所述计算机程序可以被提供在易失性或非易失性存储介质或数据载体上。
59、根据本发明的实施例,提供了一种风力发电场,其中,所述风力发电场包括多个浮动风力涡轮机和本文描述的控制系统中的任一个。
60、应当理解,在不背离本发明的范围的情况下,上述特征以及下面将要解释的特征不仅可以以所示的相应组合被使用,而且可以以其他组合或单独被使用。特别地,本发明的不同方面和实施例的特征可以彼此组合,除非相反地指出。
本文地址:https://www.jishuxx.com/zhuanli/20240726/126532.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表