一种燃气轮机转速控制方法与流程
- 国知局
- 2024-07-27 13:42:15
本发明涉及技燃气轮机术领域,尤其是一种基于高阶改进滑模控制器和变增益状态观测器的燃气轮机转速控制方法。
背景技术:
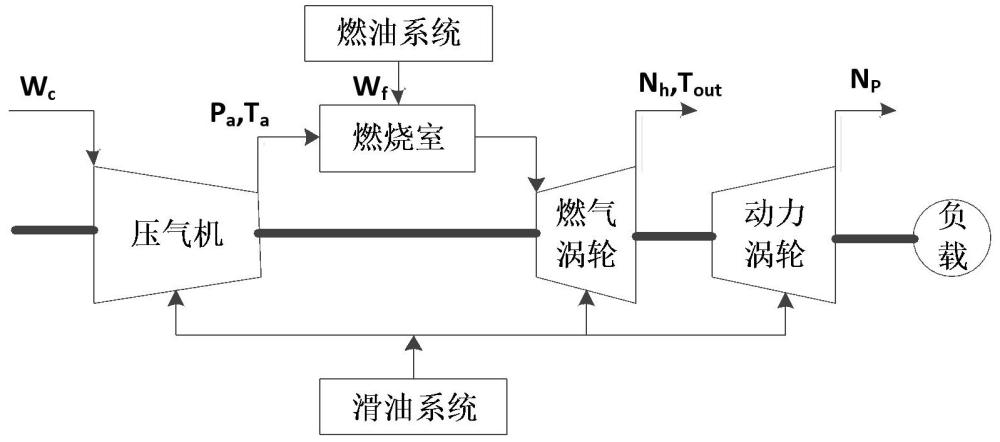
1、燃气轮机是以连续流动的气体为工质带动叶轮高速旋转,将燃料的能量转变为有用功的内燃式动力机械,是一种旋转叶轮式热力发动机。燃气轮机进入到慢车或以上工况后,空气经过压气机压缩后,进入燃烧室与燃料混合燃烧,产生的高温、高压气体推动燃气涡轮和动力涡轮做功,其中,燃气涡轮通过转动轴带动压气机旋转,实现燃机的内平衡;动力涡轮带动负载做功,实现动力输出。
2、燃气轮机通常采用闭环转速控制,通过调节燃油流量来保证其稳定运行。但燃气轮机本身的强非线性特性和长时间运行所产生的特性偏移不可避免的导致其存在一定建模误差,而转速传感器由于工作在高温、振动、油雾等恶劣环境中,信号采集经常会受到外部干扰,转速信号一旦由于建模误差或外部干扰而产生波动,控制系统可能误动作,导致降工况、紧急停机等灾难性后果。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种燃气轮机转速控制方法,从而可以有效的解决现有技术中由于建模误差或在转速传感器受到外部干扰时,无法正确获取燃气轮机的状态并进行控制的技术问题及技术需求,满足使用要求,在存在建模误差和外部扰动的情况下,能够正确获取燃气轮机的状态并进行控制。
2、本发明所采用的技术方案如下:
3、一种燃气轮机转速控制方法,包括如下操作流程:
4、s110:以燃油流量为输入量、燃气轮机测量转速为状态量,也为输出量,基于燃气轮机的气动热力学模型构建得到燃气轮机的系统状态方程,
5、
6、系统状态方程包括燃气轮机非线性可导传递函数;
7、令表示构建模型过程中存在的建模误差,表示外部干扰;则可定义表示建模和外部干扰的集总不确定项;
8、s120:基于燃气轮机的系统状态方程设计变增益状态观测器用于得到状态量估计值和辅助估计变量、;
9、s130:基于状态观测器的状态量估计误差,
10、定义扩展滑模面,并设计滑模趋近律为:
11、,
12、上式中,为符号函数,、和均为正常数,为线性校正项,用于提升系统跟踪误差收敛速度;
13、s140:结合燃气轮机的气动热力学模型,确定基于高阶改进滑模结构的转速控制律;以燃气轮机设定转速作为状态量的取值,并按照控制律在存在建模误差和传感器外部干扰的情况下对燃油流量进行控制。
14、其进一步技术方案在于:
15、燃气轮机转速控制方式包括燃气涡轮转速闭环控制和动力涡轮转速闭环控制,转速传感器包括燃气涡轮转速传感器和动力涡轮转速传感器,可根据控制要求选择对应控制量。
16、基于状态观测器的转速估计误差,变增益观测器表示为:
17、
18、其中,表示的导数,针对存在不确定性扰动的复杂系统,观测器调节增益、和来确保足够的观测精度;
19、结合燃气轮机的气动热力学模型,基于所述状态量估计值定义观测误差、、,可得
20、
21、给定增益、和的调节率为:
22、
23、其中,,均为给定调节系数;
24、由此可建立观测器误差方程
25、
26、令,误差方程可表示为:
27、
28、其中,,,,,,令,由于为hurwitz矩阵,存在为正定对称阵,满足
29、
30、其中,为正定对称阵,定义二次型lyapunov函数
31、
32、结合燃气轮机的气动热力学模型,通过选取调节增益、和,使观测器满足以下条件时
33、
34、其中,取,存在,变增益状态观测器稳定;
35、设计扩展滑模面,由此,给定高阶改进滑模算法为:
36、
37、令,上式改写为
38、
39、式中,为符号函数,、和均为正常数,为线性校正项,用于提升系统跟踪误差收敛速度;
40、确定基于高阶改进滑模控制的转速控制率为:
41、;
42、其中,,;
43、确定基于高阶改进滑模转速控制律还包括,控制率调节系数满足:
44、
45、燃气轮机转速控制方法还包括:
46、当存在燃气轮机的建模误差和转速传感器采样的外部干扰时,执行按照燃气轮机的转速控制率对燃油流量进行控制的步骤;
47、设计高阶改进滑模面为,且有
48、
49、其中,为的导数;
50、给定为设定转速,令,,,则系统状态方程可改写为:
51、。
52、本发明的有益效果如下:
53、本发明以燃油流量为输入量、燃气轮机测量转速为状态量构建燃气轮机的系统状态方程,以变增益状态观测器获取转速估计值,基于高阶改进滑模控制理论设计转速控制器,以燃气轮机设定转速作为控制目标值,并按照控制律在存在燃气轮机建模误差和外部转速采样干扰时对燃油流量进行鲁棒控制。本发明的燃机转速控制方法对燃机建模误差和外部干扰具有较强的鲁棒性,对模型精度的依赖较低且控制不易发散,在存在建模误差和外部扰动的情况下,能够正确获取燃气轮机的状态并进行控制。
54、本发明在设计转速控制律时,考虑到燃气轮机实际运行时具有大惯性、强时滞的特点,控制器输出通常难以直接落到滑模面上,而是在滑模面上频繁切换,容易引起系统的抖振。因此设计了高阶改进滑模控制函数,将不连续切换控制项作用于滑模变量高阶导数上,构建连续控制率,较好抑制了滑模控制抖振,有效提高了系统稳定性。
55、本发明设计的基于高阶改进滑模结构和变增益状态观测器的燃气轮机转速控制方法与传统pid控制相比,传统pid控制对模型精度的依赖强且转速传感器故障时控制易发散,而本申请则能够快速跟踪实际转速输出,具有响应速度快、控制精度高的控制效果,在存在建模误差和传感器外部干扰的情况下具有更强的鲁棒性和更小的超调量。
技术特征:1.一种燃气轮机转速控制方法,其特征在于:包括如下操作流程:
2.如权利要求1所述的一种燃气轮机转速控制方法,其特征在于:燃气轮机转速控制方式包括燃气涡轮转速闭环控制和动力涡轮转速闭环控制,转速传感器包括燃气涡轮转速传感器和动力涡轮转速传感器,可根据控制要求选择对应控制量。
3.如权利要求1所述的一种燃气轮机转速控制方法,其特征在于:基于状态观测器的转速估计误差,变增益观测器表示为:
技术总结本发明涉及一种燃气轮机转速控制方法,以燃油流量为输入量、燃气轮机测量转速为状态量构建燃气轮机的系统状态方程,以变增益状态观测器获取转速估计值,基于高阶改进滑模控制理论设计转速控制器,以燃气轮机设定转速作为控制目标值,并按照控制律在存在燃气轮机建模误差和外部转速采样干扰时对燃油流量进行鲁棒控制。本申请的燃机转速控制方法对燃机建模误差和外部干扰具有较强的鲁棒性,对模型精度的依赖较低且控制不易发散,在存在建模误差和外部扰动的情况下,能够正确获取燃气轮机的状态并进行控制。技术研发人员:朱嵘嘉,吴一鸣,朱鹏帅,陆俊,范政矫受保护的技术使用者:中国船舶重工集团公司第七0三研究所无锡分部技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240726/127113.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表