风机塔筒倾斜度确定方法及装置、电子设备、存储介质与流程
- 国知局
- 2024-07-27 13:47:29
本公开涉及风力发电,尤其涉及一种风机塔筒倾斜度确定方法及装置、电子设备、存储介质。
背景技术:
1、目前,我国风电技术迅猛发展,大量风电装置开始应用。风电装置结构复杂,其风机塔筒承受发电机组重力、弯矩和扭矩等多种载荷。在长期复杂负载作用下,风机塔筒容易出现倾斜隐患,不仅影响其正常工作,严重可能会出现塔筒倒塌的问题,造成巨大经济损失。
2、目前风机塔筒的倾斜检测方案大多需要在风机塔筒上安装检测所用的信息采集设备,或者需要对风机塔筒上的点进行精准的数据采集,这就增加了对风机塔筒进行倾斜检测的难度,降低了倾斜检测的效率和精度。
技术实现思路
1、本公开至少提供了一种风机塔筒倾斜度确定方法及装置、电子设备、存储介质,以降低对风机塔筒进行倾斜检测的难度,提高倾斜检测的效率和精度。
2、根据本公开的一方面,提供了一种风机塔筒倾斜度确定方法,包括:
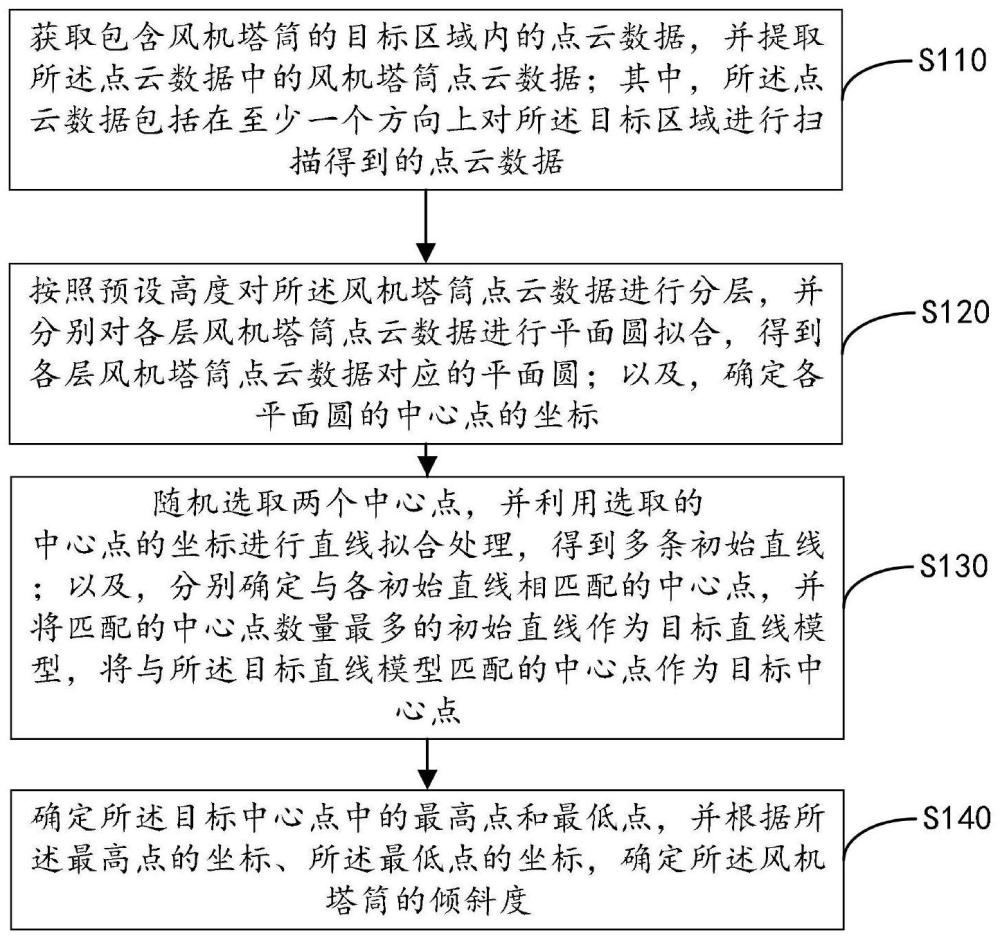
3、获取包含风机塔筒的目标区域内的点云数据,并提取所述点云数据中的风机塔筒点云数据;其中,所述点云数据包括在至少一个方向上对所述目标区域进行扫描得到的点云数据;
4、按照预设高度对所述风机塔筒点云数据进行分层,并分别对各层风机塔筒点云数据进行平面圆拟合,得到各层风机塔筒点云数据对应的平面圆;以及,确定各平面圆的中心点的坐标;
5、随机选取两个中心点,并利用选取的中心点的坐标进行直线拟合处理,得到多条初始直线;以及,分别确定与各初始直线相匹配的中心点,并将匹配的中心点数量最多的初始直线作为目标直线模型,将与所述目标直线模型匹配的中心点作为目标中心点;
6、确定所述目标中心点中的最高点和最低点,并根据所述最高点的坐标、所述最低点的坐标,确定所述风机塔筒的倾斜度。
7、在一种可能的实施方式中,所述提取所述点云数据中的风机塔筒点云数据,包括:
8、在所述点云数据包括在多个方向上对所述目标区域进行扫描得到的点云数据的情况下,对在各个方向上对所述目标区域进行扫描得到的点云数据进行点云拼接,得到目标点云数据;
9、对所述目标点云数据进行分类,得到所述风机塔筒点云数据。
10、在一种可能的实施方式中,所述平面圆的高度按照如下步骤确定:
11、将所述平面圆对应的风机塔筒点云数据的平均高度,作为所述平面圆的高度。
12、在一种可能的实施方式中,所述随机选取两个中心点,并利用选取的中心点的坐标进行直线拟合处理,得到多条初始直线,包括:
13、随机选取两个中心点,并对选取的两个中心点的坐标进行直线拟合处理,得到一条初始直线;
14、多次随机选取两个中心点,并进行所述直线拟合处理,得到多条初始直线。
15、在一种可能的实施方式中,所述分别确定与各初始直线相匹配的中心点,并将匹配的中心点数量最多的初始直线作为目标直线模型,包括:
16、分别确定与各初始直线相匹配的中心点;
17、将匹配的中心点数量小于预设值的初始直线剔除;
18、剩余的初始直线中,将匹配的中心点数量最多的初始直线作为目标直线模型。
19、在一种可能的实施方式中,所述确定所述目标中心点中的最高点和最低点,包括:
20、利用所述目标中心点进行直线拟合,得到目标直线段;
21、根据所述目标直线段,确定所述目标中心点中的最高点和最低点。
22、在一种可能的实施方式中,所述点云数据包括三维激光扫描数据。
23、根据本公开的另一方面,提供了一种风机塔筒倾斜度确定装置,包括:
24、数据处理模块,用于获取包含风机塔筒的目标区域内的点云数据,并提取所述点云数据中的风机塔筒点云数据;其中,所述点云数据包括在至少一个方向上对所述目标区域进行扫描得到的点云数据;
25、圆拟合处理模块,用于按照预设高度对所述风机塔筒点云数据进行分层,并分别对各层风机塔筒点云数据进行平面圆拟合,得到各层风机塔筒点云数据对应的平面圆;以及,确定各平面圆的中心点的坐标;
26、直线拟合处理模块,用于随机选取两个中心点,并利用选取的中心点的坐标进行直线拟合处理,得到多条初始直线;以及,分别确定与各初始直线相匹配的中心点,并将匹配的中心点数量最多的初始直线作为目标直线模型,将与所述目标直线模型匹配的中心点作为目标中心点;
27、倾斜度确定模块,用于确定所述目标中心点中的最高点和最低点,并根据所述最高点的坐标、所述最低点的坐标,确定所述风机塔筒的倾斜度。
28、根据本公开的另一方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器在执行所述计算机程序时实现上述任一项所述的方法。
29、根据本公开的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的方法。
30、本公开的风机塔筒倾斜度确定方法,首先获取包含风机塔筒的目标区域内的点云数据,并提取点云数据中的风机塔筒点云数据;之后按照预设高度对风机塔筒点云数据进行分层,并分别对各层风机塔筒点云数据进行平面圆拟合,以及,确定各平面圆的中心点的坐标;之后,利用选取的中心点的坐标进行直线拟合处理,得到多条初始直线,以及,分别确定与各初始直线相匹配的中心点,并将匹配的中心点数量最多的初始直线作为目标直线模型,将与目标直线模型匹配的中心点作为目标中心点;最后,确定目标中心点中的最高点和最低点,并根据最高点的坐标、最低点的坐标,确定风机塔筒的倾斜度。上述方案利用采集的激光点云数据,可以非接触式计算风机塔筒的倾斜度,避免在风机塔筒上安装相关的采集设备,便捷性和检测效率均得到有效提高,人力和器件维护成本均得到有效降低;并且也不会由于特定点数据采集的误差对检测结果造成不利影响,本公开的方案采集的数据精度高,点云数量多,相比较其结果鲁棒性更强,精度更高。
31、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种风机塔筒倾斜度确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述提取所述点云数据中的风机塔筒点云数据,包括:
3.根据权利要求1所述的方法,其特征在于,所述平面圆的高度按照如下步骤确定:
4.根据权利要求1所述的方法,其特征在于,所述随机选取两个中心点,并利用选取的中心点的坐标进行直线拟合处理,得到多条初始直线,包括:
5.根据权利要求1所述的方法,其特征在于,所述分别确定与各初始直线相匹配的中心点,并将匹配的中心点数量最多的初始直线作为目标直线模型,包括:
6.根据权利要求1所述的方法,其特征在于,所述确定所述目标中心点中的最高点和最低点,包括:
7.根据权利要求1所述的方法,其特征在于,所述点云数据包括三维激光扫描数据。
8.一种风机塔筒倾斜度确定装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器在执行所述计算机程序时实现权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7中任一项所述的方法。
技术总结本公开提供了一种风机塔筒倾斜度确定方法及装置、电子设备、存储介质,本公开首先获取包含风机塔筒的目标区域内的点云数据,并提取点云数据中的风机塔筒点云数据;之后按照预设高度对风机塔筒点云数据进行分层,并分别对各层风机塔筒点云数据进行平面圆拟合,以及,确定各平面圆的中心点的坐标;之后,随机选取两个中心点,并利用选取的中心点的坐标进行直线拟合处理,得到多条初始直线,以及,分别确定与各初始直线相匹配的中心点,并将匹配的中心点数量最多的初始直线作为目标直线模型,将与目标直线模型匹配的中心点作为目标中心点;最后,确定目标中心点中的最高点和最低点,并根据最高点的坐标、最低点的坐标,确定风机塔筒的倾斜度。技术研发人员:张磊,王跃,林忠权,张龙,黄利刚,郭彦明,李微微,徐光彩,赵宝林,吴芳芳,孙喜亮,康泰钟受保护的技术使用者:北京数字绿土科技股份有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240726/127624.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表