一种管道检测智能机器人
- 国知局
- 2024-07-30 12:52:36
本技术属于管道检测,更具体地,涉及一种管道检测智能机器人。
背景技术:
1、管道是现代工业生产中不可或缺的重要设备,其安全运行与企业的生产经济密切相关。由于管道深埋地下,管道泄漏、腐蚀、破裂等事故会导致不可预知的后果,会带来严重的经济损失和安全隐患。传统的管道检测和维护往往需要大量的人力和物力支持,效率低下,并且存在一定的安全隐患,获取的检测数据往往过于离散,难以全面反映管道整体特征以及病害、缺陷信息。
2、现有的管道检测智能机器人无法完全获取管道内部全视场角的点云扫描,导致目前管道检测机器人模型精度不够高。同时,由于管道内部信号较差,一些管道检测智能机器人通过连接线缆向管道外部传输信息,使得机器人的行进距离受限。
技术实现思路
1、针对现有技术的缺陷和改进需求,本实用新型提供了一种管道检测智能机器人,其目的在于提升管道检测精度。
2、为实现上述目的,本实用新型提供了一种管道检测智能机器人,包括:机器人本体和数据采集模块;
3、所述数据采集模块用于采集管道内部数据,所述数据采集模块包括:第一激光雷达、第二激光雷达、全景相机和imu;
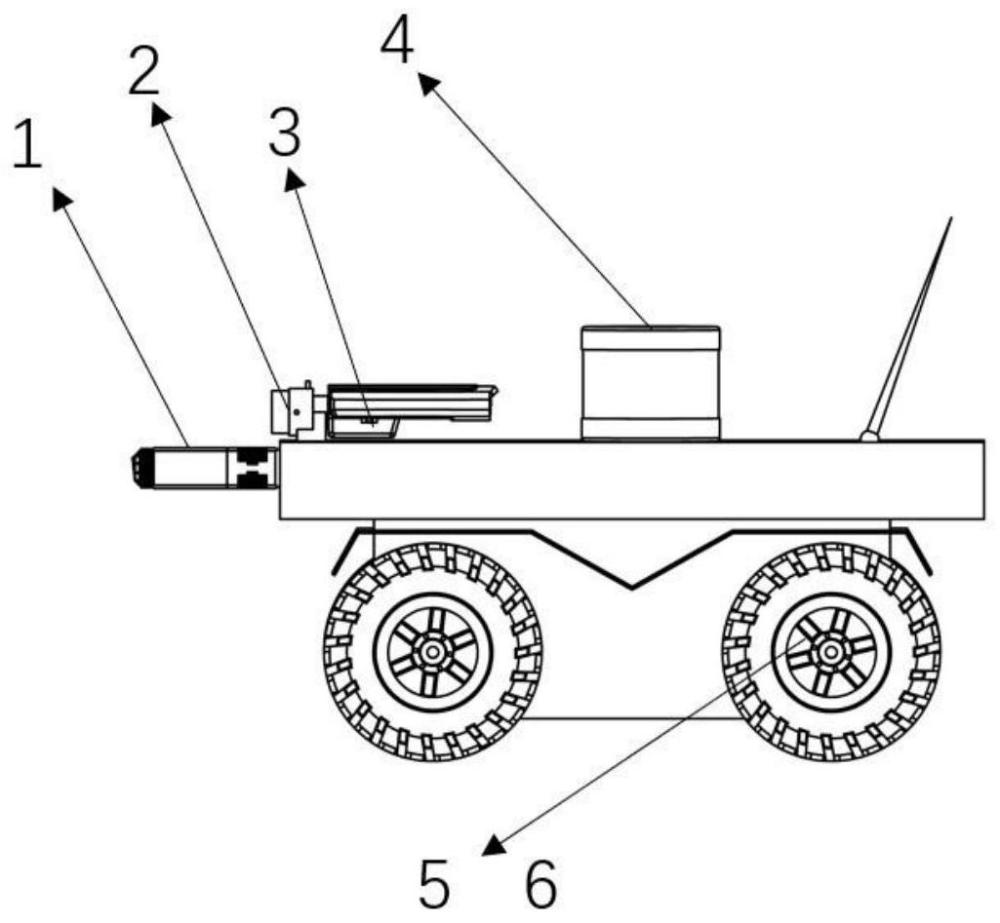
4、其中,所述第一激光雷达水平设置在所述机器人本体的上端面,所述第二激光雷达垂直设置在所述机器人本体的上端面,所述全景相机设置在所述机器人本体的上端面,所述imu水平设置在所述全景相机内;
5、所述机器人本体包括移动底座、电机、计算模块和电源;
6、所述电机用于驱动所述移动底座使所述机器人移动;
7、所述计算模块用于根据所述管道内部数据对管道内部结构进行三维重建。
8、进一步地,所述数据采集模块还包括分别对称设置在所述机器人本体两侧车轮上的第一车轮编码器和第二车轮编码器。
9、进一步地,还包括设置在管道井口的信号接收模块,用于接收所述机器人回传的信号。
10、进一步地,所述移动底座包含可开合的盖板和盖板锁栓,所述盖板通过所述盖板锁栓实现开合。
11、进一步地,所述移动底座还包括四个行走轮。
12、进一步地,所述移动底座的材料为铝合金。
13、进一步地,第一激光雷达、第二激光雷达及全景相机通过钢架连接件设置在所述机器人本体的上端面。
14、进一步地,所述全景相机上水平设置在所述钢架连接件上。
15、进一步地,所述全景相机上设有照明光源。
16、进一步地,所述计算模块为板载计算机。
17、总体而言,通过本实用新型所构思的以上技术方案,能够取得以下有益效果:
18、(1)本实用新型的管道检测智能机器人,通过水平和竖直设置在机器人本体的上端面的第一激光雷达和第二激光雷达,分别从水平方向和竖直方向采集管道内部结构的点云,可以实现管道内部结构全视场角的点云扫描,通过计算模块可以获得更加精准的三维管道模型,用该精准的三维管道模型进行管道检测,可以提升管道检测精度。
19、(2)进一步地,在进行机器人轨迹定位时,通过设置在机器人本体两侧车轮上的第一车轮编码器和第二车轮编码器,采集车轮在平面上的里程数据对惯性测量单元采集的数据进行校准,以减小惯性测量单元的累积误差,进一步提升检测精度。
20、(3)进一步地,通过设置在管道井口的信号接收模块接收管道内的机器人数据采集模块采集的管道内部数据、机器人的实时轨迹,以及三维重建的管道内部结构等数据,相比通过连接线缆向管道外部传输信息的方式,本实用新型中机器人的行进距离不受限止,可以适应多种复杂的管道环境,并可以提升检测效率。
21、总而言之,本实用新型的管道检测机器人是一种高速、稳定行进并且行进距离不受限的管道检测机器人,通过检测机器人进行管道检测,生成精确的管道点云模型,实现管道病害识别及定位,提高检测质量和效率。
技术特征:1.一种管道检测智能机器人,其特征在于,包括:机器人本体和数据采集模块;
2.根据权利要求1所述的管道检测智能机器人,其特征在于,所述数据采集模块还包括分别对称设置在所述机器人本体两侧车轮上的第一车轮编码器(5)和第二车轮编码器(6)。
3.根据权利要求1或2所述的管道检测智能机器人,其特征在于,还包括设置在管道井口的信号接收模块,用于接收所述机器人回传的信号。
4.根据权利要求1或2所述的管道检测智能机器人,其特征在于,所述移动底座包含可开合的盖板和盖板锁栓,所述盖板通过所述盖板锁栓实现开合。
5.根据权利要求4所述的管道检测智能机器人,其特征在于,所述移动底座还包括四个行走轮。
6.根据权利要求5所述的管道检测智能机器人,其特征在于,所述移动底座的材料为铝合金。
7.根据权利要求1所述的管道检测智能机器人,其特征在于,第一激光雷达(1)、第二激光雷达(4)及全景相机(2)通过钢架连接件设置在所述机器人本体的上端面。
8.根据权利要求7所述的管道检测智能机器人,其特征在于,所述全景相机上水平设置在所述钢架连接件上。
9.根据权利要求7或8所述的管道检测智能机器人,其特征在于,所述全景相机上设有照明光源。
10.根据权利要求1所述的管道检测智能机器人,其特征在于,所述计算模块为板载计算机。
技术总结本技术公开了一种管道检测智能机器人,属于管道检测技术领域,包括:机器人本体和数据采集模块;所述数据采集模块用于采集管道内部数据,所述数据采集模块包括:第一激光雷达、第二激光雷达、全景相机和IMU;其中,所述第一激光雷达水平设置在所述机器人本体的上端面,所述第二激光雷达垂直设置在所述机器人本体的上端面,所述全景相机设置在所述机器人本体的上端面,IMU水平设置在全景相机内;所述机器人本体包括移动底座、电机、计算模块和电源。本技术的管道检测机器人是一种高速、稳定行进并且行进距离不受限的管道检测机器人,通过检测机器人进行管道检测,生成精确的管道点云模型,实现管道病害识别及定位,提高检测质量和效率。技术研发人员:杨博纯,罗力铭,刘文黎,江月明,骆汉宾受保护的技术使用者:华中科技大学技术研发日:20231031技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240729/162069.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表