高空作业车液压系统比例阀控制方法和控制单元与流程
- 国知局
- 2024-07-30 14:22:30
本申请涉及一种用于控制高空作业车的液压系统中的比例阀的控制方法和控制单元,其能够降低比例阀滞环影响。
背景技术:
1、高空作业车(高空作业平台)是一种用于高空作业的设备,主要应用于建筑工地、电力工程、路灯维修及其他市政行业等。高空作业车包括液压系统,用于驱动各个运动部件的运动,诸如升降台移动、上车回转、整车行走等。液压系统包括主泵和设置在主泵输出端的比例阀,该比例阀的开度取决于施加到比例阀控制端的控制电流的大小。
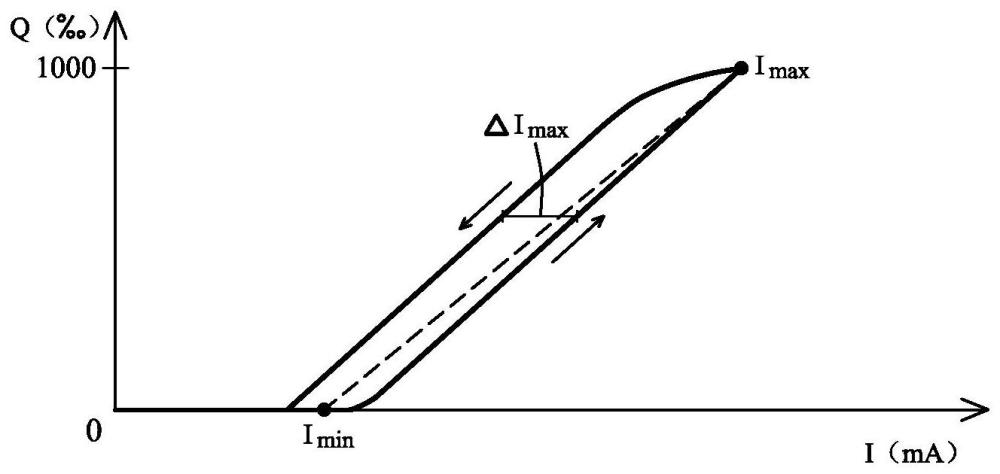
2、滞环是比例阀的重要静态指标。由于滞环的存在,导致比例阀的实际启动电流大于标称最小电流,实际关闭电流小于标称最小电流。在高空作业车应用中,需要缓解比例阀启停时导致的冲击。为此,比例阀在启动和关闭时,要对电流的上升和下降过程采用长斜坡控制。这样,可以减缓升降台启停动作的冲击。现有高空作业车的液压系统的控制策略中,通常未能完善解决滞环对比例阀性能的影响,导致由比例阀控制的动作存在启动时延迟和停止时冲击的问题。
技术实现思路
1、本申请的一个目的在于提供一种用于高空作业车的控制方案,其能够补偿滞环对比例阀性能的影响,抑制由比例阀控制的动作的启动延迟和停止冲击的问题。
2、为了实现该目的,本申请在一个方面提供了一种用于高空作业车液压系统比例阀的控制方法,所述比例阀具有标称的最小电流和最大电流和中间电流,所述控制方法包括下述步骤:
3、确定在相同输出流量下比例阀电流在上升和下降过程中的最大电流差值;
4、基于所述最大电流差值确定比例阀的第一修正值和第二修正值;
5、基于高空作业车常规操作指令信号控制比例阀电流,其中常规操作中对比例阀电流的控制包括:响应于操控手柄位置由0位移动到常规操作位置的电流上升控制以及操控手柄位置由常规操作位置移回0位的电流下降控制,其中常规操作位置包括操控手柄的最大位置和中间位置;
6、其中,所述电流上升控制包括:控制比例阀电流从0阶跃到第一电流值,所述第一电流值等于所述最小电流加上所述第一修正值;然后控制比例阀电流从所述第一电流值斜坡上升到与常规操作位置对应的比例阀标称电流,与常规操作位置对应的比例阀标称电流包括所述最大电流和中间电流;
7、所述电流下降控制包括:控制比例阀电流从与常规操作位置对应的比例阀标称电流斜坡下降到第二电流值,所述第二电流值等于所述最小电流减去所述第二修正值;然后控制比例阀电流从所述第二电流值阶跃到0。
8、所述第一修正值和第二修正值可以彼此相等或不等。
9、在一种实施方式中,所述第一修正值和第二修正值分别为所述最大电流差值的大约一半。
10、在一种实施方式中,所述斜坡上升在预先设置的上升斜坡时间内执行,所述斜坡下降在预先设置的下降斜坡时间内执行。
11、在一种实施方式中,所述上升斜坡时间和下降斜坡时间各自为1到4秒。
12、在一种实施方式中,所述斜坡上升和斜坡下降中比例阀电流变化的单位步长各自为大约10ma。
13、在一种实施方式中,所述控制方法还包括:基于高空作业车微动操作指令信号控制比例阀电流,其中微动操作中对比例阀电流的控制包括以跟随操控手柄位置的形式控制比例阀电流。
14、在一种实施方式中,微动操作中对比例阀电流的控制包括:响应于操控手柄位置由0位移动到微动操作位置,其中微动操作位置包括最大位置和中间位置,控制比例阀电流从0阶跃到所述最小电流,然后控制比例阀电流从所述最小电流以跟随于手柄位置的方式上升到与微动操作位置对应的比例阀标称电流,其中与微动操作位置对应的比例阀标称电流包括所述最大电流和中间电流。
15、在一种实施方式中,微动操作中对比例阀电流的控制还包括:响应于操控手柄位置由微动操作位置移回0位,控制比例阀电流从与微动操作位置对应的比例阀标称电流以跟随于手柄位置的方式下降到所述第二电流值;然后控制比例阀电流从所述第二电流值阶跃到0。
16、本申请在另一方面提供了一种用于高空作业车液压系统比例阀的控制单元,配置成执行本申请的控制方法。
17、根据本申请的控制方案,在常规操作中,控制施加给比例阀的启动电流大于标称最小电流、关闭电流小于标称最小电流,有效地抑制了高空作业车的动作启动时延迟和停止时冲击的问题。
技术特征:1.一种用于高空作业车液压系统比例阀的控制方法,所述比例阀具有标称的最小电流(imin)和最大电流(imax)和中间电流,所述控制方法包括下述步骤:
2.如权利要求1所述的控制方法,其中,所述第一修正值(δi1)和第二修正值(δi2)彼此相等或不等。
3.如权利要求1所述的控制方法,其中,所述第一修正值(δi1)和第二修正值(δi2)分别为所述最大电流差值(δimax)的大约一半。
4.如权利要求1所述的控制方法,其中,所述斜坡上升在预先设置的上升斜坡时间内执行,所述斜坡下降在预先设置的下降斜坡时间内执行。
5.如权利要求4所述的控制方法,其中,所述上升斜坡时间和下降斜坡时间各自为1到4秒。
6.如权利要求4或5所述的控制方法,其中,所述斜坡上升和斜坡下降中比例阀电流变化的单位步长各自为大约10ma。
7.如权利要求1-6中任一项所述的控制方法,其中,所述控制方法还包括:基于高空作业车微动操作指令信号控制比例阀电流,其中微动操作中对比例阀电流的控制包括以跟随操控手柄位置的形式控制比例阀电流。
8.如权利要求7所述的控制方法,其中,微动操作中对比例阀电流的控制包括:响应于操控手柄位置由0位移动到微动操作位置,其中微动操作位置包括最大位置和中间位置,控制比例阀电流从0阶跃到所述最小电流(imin),然后控制比例阀电流从所述最小电流(imin)以跟随于手柄位置的方式上升到与微动操作位置对应的比例阀标称电流,其中与微动操作位置对应的比例阀标称电流包括所述最大电流(imax)和中间电流。
9.如权利要求8所述的控制方法,其中,微动操作中对比例阀电流的控制还包括:响应于操控手柄位置由微动操作位置移回0位,控制比例阀电流从与微动操作位置对应的比例阀标称电流以跟随于手柄位置的方式下降到所述第二电流值;然后控制比例阀电流从所述第二电流值阶跃到0。
10.一种用于高空作业车液压系统比例阀的控制单元,配置成执行如权利要求1-9中任一项所述的控制方法。
技术总结一种用于高空作业车液压系统比例阀的控制方法包括:在常规操作中,响应于操控手柄位置由0位移动到常规操作位置执行电流上升控制以及响应于操控手柄位置由常规操作位置移回0位执行电流下降控制。所述电流上升控制包括:控制比例阀电流从0阶跃到比例阀最小电流加上第一修正值,然后控制比例阀电流斜坡上升到与常规操作位置对应的比例阀标称电流。所述电流下降控制包括:控制比例阀电流从所述比例阀标称电流斜坡下降到比例阀最小电流减去第二修正值,然后控制比例阀电流阶跃到0。技术研发人员:王新亮,赵宇豪,陈昊裕受保护的技术使用者:博世力士乐(北京)液压有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240729/166636.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。