一种水下机器人用万米级超高压二级串联泵油系统
- 国知局
- 2024-07-30 14:34:01
本发明属于水下机器人领域,具体地说是一种水下机器人用万米级超高压二级串联泵油系统。
背景技术:
1、水下机器人作为一种水下测量、作业平台,已经广泛应用在海洋科学研究、海洋工程、海洋资源勘探、救援打捞等应用领域。通常水下机器人在作业过程中要保持机体的稳定,这就需要保持稳定的浮力状态。然而,由于海流、波浪等的影响,水下机器人在水中不能保持稳定姿态,其浮力状态会发生不同程度的波动,从而影响水下机器人的整体性能。通常专用的水下机器人的浮力调节装置要靠一套泵油系统将液压油从内囊输送到外囊,从而调节水下机器人的排水体积,达到理想的浮力状态。
2、水下机器人是人类探索、认识和利用海洋的有效高技术手段和装备,向深海深渊进军,是当前国际上水下机器人的一个重要发展方向和趋势。深渊专指海洋中深度大于6500m的海沟区域,代表了地球上非常独特的海洋极端环境。由于受深海技术的限制,深渊是迄今人类知之极少却又难以企及的区域.全海深水下机器人是一种具备覆盖全球所有海洋深度能力的水下机器人,下潜深度超过一万米时,海水压力大于100mpa。在超高压条件下,将液压油泵入到受到海水压力的外囊中去变得十分困难。
技术实现思路
1、为了解决上述水下机器人在超高压条件下液压油泵油困难的问题,本发明的目的在于提供一种水下机器人用万米级超高压二级串联泵油系统,满足了水下机器人结构紧凑、能耗小、工作可靠等需求。
2、本发明的目的是通过以下技术方案来实现的:
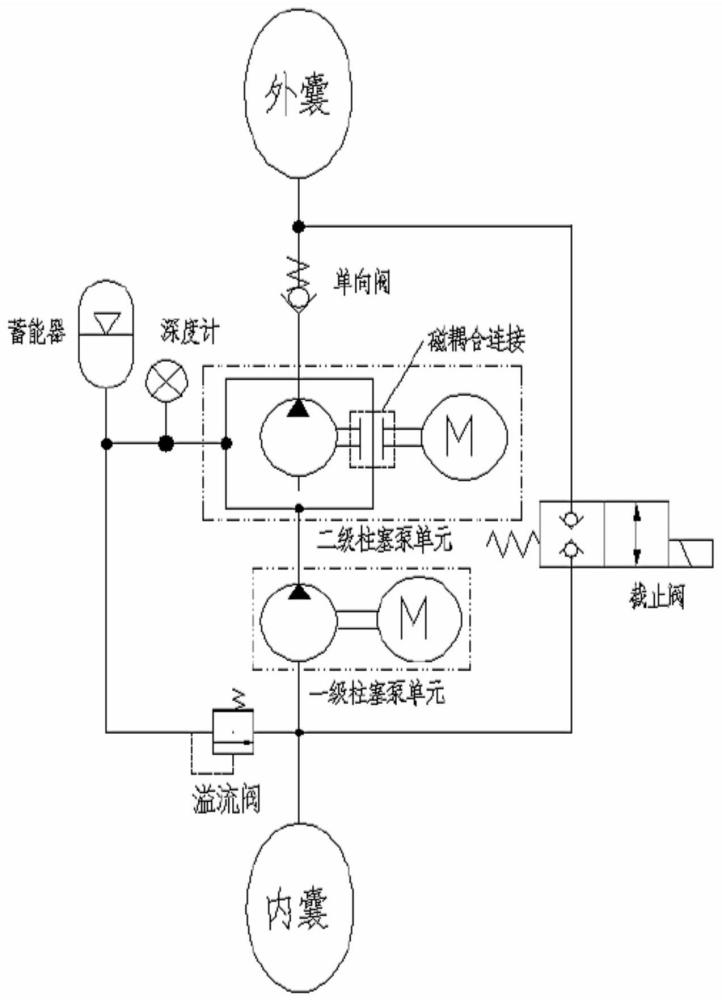
3、本发明包括一级柱塞泵单元、总体阀块、蓄能器、截止阀、二级柱塞泵单元及底部安装板,其中一级柱塞泵单元、总体阀块及二极柱塞泵单元分别安装于底部安装板上,所述总体阀块上分别安装有蓄能器及截止阀,所述一级柱塞泵单元、二级柱塞泵单元通过液压管、管接头分别与总体阀块相连,所述一级柱塞泵单元、二级柱塞泵单元之间为串联,所述一级柱塞泵单元的进油口与内囊相连,所述蓄能器与二级柱塞泵单元的吸油口连接,所述二级柱塞泵单元的出油口经单向阀与外囊连接,所述截止阀连通于外囊与内囊之间的回油油路上;所述二级柱塞泵单元的组合电机通过磁耦合的方式与柱塞泵连接,驱动所述柱塞泵旋转泵油。
4、其中:所述二级柱塞泵单元包括泵外壳、二级柱塞泵转接件、柱塞泵、外磁极、内磁极、前端固定件、隔离罩、联轴器、组合电机及电机安装件,所述组合电机连接于电机安装件的一端,所述电机安装件的另一端与隔离罩相连,所述泵外壳与隔离罩的一端密封连接;所述联轴器、前端固定件、外磁极及内磁极均容置于电机安装件内,所述柱塞泵及二级柱塞泵转接件均容置于泵外壳内,所述组合电机的输出轴通过联轴器与前端固定件的一端相连,所述前端固定件的另一端与外磁极连接,所述内磁极位于外磁极内部,且所述外磁极与内磁极之间通过隔离罩的另一端隔开,所述内磁极与隔离罩的另一端之间及隔离罩的另一端与外磁极之间均转动连接;所述柱塞泵一端的柱塞泵轴与内磁极相连、传递转矩,所述二级柱塞泵转接件与柱塞泵的另一端螺纹连接,并与所述泵外壳密封连接。
5、所述外磁极包括外圈磁轭及外圈磁钢,所述外圈磁钢位于外圈磁轭内部,并与所述外圈磁轭连接为一体,所述外圈磁轭与前端固定件的另一端固接,所述外圈磁轭及前端固定件分别通过轴承与隔离罩的另一端转动连接。
6、所述内磁极包括内圈磁轭及内圈磁钢,所述内圈磁钢位于内圈磁轭内部,所述内圈磁轭及内圈磁钢的一侧设有磁耦合压紧盘,所述磁耦合压紧盘固接于内圈磁轭的一端,所述内圈磁钢通过磁耦合压紧盘与内圈磁轭连接为一体,所述内圈磁轭的另一端与柱塞泵的柱塞泵轴相连;所述内圈磁轭的两端分别通过轴承与隔离罩的另一端转动连接。
7、所述内圈磁轭的另一端与隔离罩的另一端之间的轴承为深沟球轴承,所述深沟球轴承与柱塞泵之间设有轴套,所述轴套的外圈与隔离罩另一端的内表面抵接,所述深沟球轴承的外圈通过轴套及内圈磁轭另一端的止口轴向限位。
8、所述柱塞泵的一端通过隔离罩内的止口定位,所述柱塞泵的一端与泵外壳之间设有定位销,所述泵外壳通过定位销压紧固定柱塞泵。
9、所述泵外壳上开设有吸油口,所述二级柱塞泵转接件上开设有出油口。
10、所述一级柱塞泵单元的出油口处连接有管接头a,所述管接头a通过液压管a与总体阀块连接;所述二级柱塞泵单元的吸油口处连接有管接头c,所述管接头c通过液压管c与总体阀块连接,所述二级柱塞泵单元的吸油口与一级柱塞泵单元的出油口串联,且与所述蓄能器连接,所述总体阀块上安装有管接头b,所述二级柱塞泵单元的出油口通过液压管b与管接头b连接。
11、所述总体阀块上安装有深度计,所述深度计连通于二级柱塞泵单元的吸油口与蓄能器之间的油路上。
12、所述总体阀块上安装有溢流阀,所述溢流阀连通于蓄能器与内囊之间的油路上。
13、本发明的优点与积极效果为:
14、1.本发明由电机驱动柱塞泵工作,实现排油,通过开启截止阀实现自动回油,进而调节水下机器人的浮力,结构简单,安全可靠。
15、2.本发明的一级柱塞泵单元与二级柱塞泵单元串联连接,二级柱塞泵单元将具有一定基础压力的液压油进一步压缩并输出至外囊,从而满足水下机器人在万米水深时的工作需要。
16、3.本发明的组合电机与柱塞泵之间采用磁耦合的连接方式,可以承受住二级柱塞泵单元的吸油口30mpa的高压,减少轴向泄露。
17、4.应用本发明的水下机器人载体内为负压,打开截止阀就可让外皮囊内的液压油回到内囊,节省了能源。
18、5.本发明采用两个小型高压柱塞泵,能够提供很高的工作压力,满足了水下机器人万米水深作业的要求。
19、6.本发明的深度计把压力参数传到主控板,当压力低于设定压力时一级柱塞泵单元就启动,向蓄能器内充油;当压力达到设定压力时一级柱塞泵单元停止,可以节约能源。
技术特征:1.一种水下机器人用万米级超高压二级串联泵油系统,其特征在于:包括一级柱塞泵单元(1)、总体阀块(4)、蓄能器(6)、截止阀(8)、二级柱塞泵单元(12)及底部安装板(36),其中一级柱塞泵单元(1)、总体阀块(4)及二极柱塞泵单元(12)分别安装于底部安装板(36)上,所述总体阀块(4)上分别安装有蓄能器(6)及截止阀(8),所述一级柱塞泵单元(1)、二级柱塞泵单元(12)通过液压管、管接头分别与总体阀块(4)相连,所述一级柱塞泵单元(1)、二级柱塞泵单元(12)之间为串联,所述一级柱塞泵单元(1)的进油口与内囊相连,所述蓄能器(6)与二级柱塞泵单元(12)的吸油口(34)连接,所述二级柱塞泵单元(12)的出油口(35)经单向阀与外囊连接,所述截止阀(8)连通于外囊与内囊之间的回油油路上;所述二级柱塞泵单元(12)的组合电机(31)通过磁耦合的方式与柱塞泵(17)连接,驱动所述柱塞泵(17)旋转泵油。
2.根据权利要求1所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述二级柱塞泵单元(12)包括泵外壳(13)、二级柱塞泵转接件(14)、柱塞泵(17)、外磁极、内磁极、前端固定件(24)、隔离罩(27)、联轴器、组合电机(31)及电机安装件(32),所述组合电机(31)连接于电机安装件(32)的一端,所述电机安装件(32)的另一端与隔离罩(27)相连,所述泵外壳(13)与隔离罩(27)的一端密封连接;所述联轴器、前端固定件(24)、外磁极及内磁极均容置于电机安装件(32)内,所述柱塞泵(17)及二级柱塞泵转接件(14)均容置于泵外壳(13)内,所述组合电机(31)的输出轴通过联轴器与前端固定件(24)的一端相连,所述前端固定件(24)的另一端与外磁极连接,所述内磁极位于外磁极内部,且所述外磁极与内磁极之间通过隔离罩(27)的另一端隔开,所述内磁极与隔离罩(27)的另一端之间及隔离罩(27)的另一端与外磁极之间均转动连接;所述柱塞泵(17)一端的柱塞泵轴与内磁极相连、传递转矩,所述二级柱塞泵转接件(14)与柱塞泵(17)的另一端螺纹连接,并与所述泵外壳(13)密封连接。
3.根据权利要求2所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述外磁极包括外圈磁轭(20)及外圈磁钢(23),所述外圈磁钢(23)位于外圈磁轭(20)内部,并与所述外圈磁轭(20)连接为一体,所述外圈磁轭(20)与前端固定件(24)的另一端固接,所述外圈磁轭(20)及前端固定件(24)分别通过轴承与隔离罩(27)的另一端转动连接。
4.根据权利要求2所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述内磁极包括内圈磁轭(22)及内圈磁钢(28),所述内圈磁钢(28)位于内圈磁轭(22)内部,所述内圈磁轭(22)及内圈磁钢(28)的一侧设有磁耦合压紧盘(30),所述磁耦合压紧盘(30)固接于内圈磁轭(22)的一端,所述内圈磁钢(28)通过磁耦合压紧盘(30)与内圈磁轭(22)连接为一体,所述内圈磁轭(22)的另一端与柱塞泵(17)的柱塞泵轴相连;所述内圈磁轭(22)的两端分别通过轴承与隔离罩(27)的另一端转动连接。
5.根据权利要求4所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述内圈磁轭(22)的另一端与隔离罩(27)的另一端之间的轴承为深沟球轴承(15),所述深沟球轴承(15)与柱塞泵(17)之间设有轴套(21),所述轴套(21)的外圈与隔离罩(27)另一端的内表面抵接,所述深沟球轴承(15)的外圈通过轴套(21)及内圈磁轭(22)另一端的止口轴向限位。
6.根据权利要求2所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述柱塞泵(17)的一端通过隔离罩(27)内的止口定位,所述柱塞泵(17)的一端与泵外壳(13)之间设有定位销(18),所述泵外壳(13)通过定位销(18)压紧固定柱塞泵(17)。
7.根据权利要求2所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述泵外壳(13)上开设有吸油口(34),所述二级柱塞泵转接件(14)上开设有出油口(35)。
8.根据权利要求1所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述一级柱塞泵单元(1)的出油口处连接有管接头a(2),所述管接头a(2)通过液压管a(3)与总体阀块(4)连接;所述二级柱塞泵单元(12)的吸油口处连接有管接头c(11),所述管接头c(11)通过液压管c(38)与总体阀块(4)连接,所述二级柱塞泵单元(12)的吸油口与一级柱塞泵单元(1)的出油口串联,且与所述蓄能器(6)连接,所述总体阀块(4)上安装有管接头b(9),所述二级柱塞泵单元(12)的出油口通过液压管b(10)与管接头b(9)连接。
9.根据权利要求8所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述总体阀块(4)上安装有深度计(7),所述深度计(7)连通于二级柱塞泵单元(12)的吸油口与蓄能器(6)之间的油路上。
10.根据权利要求1所述的水下机器人用万米级超高压二级串联泵油系统,其特征在于:所述总体阀块(4)上安装有溢流阀(5),所述溢流阀(5)连通于蓄能器(6)与内囊之间的油路上。
技术总结本发明属于水下机器人领域,具体地说是一种水下机器人用万米级超高压二级串联泵油系统。电机驱动柱塞泵工作,实现排油,通过开启截止阀实现自动回油,进而调节水下机器人的浮力,结构简单,安全可靠。一级柱塞泵单元与二级柱塞泵单元串联,进一步压缩液压油并输出至外囊,从而满足水下机器人在万米水深时的工作需要。利用深度计把压力参数传到主控板,当压力低于设定压力时,一级柱塞泵单元就启动向蓄能器内充油,当压力达到设定压力时一级柱塞泵单元停止工作。通过磁耦合,利用磁场透过磁场和隔离套薄壁传动扭矩带动内磁转子,组合电机带动柱塞泵工作,实现非接触连接从而可以承受轴向高压以及从根本上消除了轴封的泄露通道,实现完全密封。技术研发人员:谭智铎,金文明,俞建成,刘顺杰,李超受保护的技术使用者:中国科学院沈阳自动化研究所技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240729/167447.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表