一种改进型ROV位置保持自抗扰控制器及控制方法
- 国知局
- 2024-07-30 09:21:22
本发明涉及水下机器人控制,更具体的说是涉及一种改进型rov位置保持自抗扰控制器及控制方法。
背景技术:
1、rov在执行特定任务时,比如水面对接、水下管道检修、石油开采等等都会对位置有严格要求,要求在作业过程中位置保持不变,这使得rov位置控制成为目前的研究热点。
2、水域环境复杂多变,外界干扰力类型也比较复杂,比如水中存在暗流、波浪、海洋生物等等,又比如外界风力、脐带缆反作用力等等,这些都会对rov位置保持造成干扰,由于rov工作环境中的存在多种干扰力,无法进行分类控制,且rov本身属于强耦合、强非线性结构、无法建立精确数学模型,无法进行精确控制,因此选用自抗扰控制方法,该方法不区分干扰类型,将所有干扰扩张成一个总扰动,十分适合rov工作环境。
3、一般认为rov位置变化是由波浪所引起的,一是由二阶波浪力引起的缓慢漂移运动,属于低频运动;二是由一阶波浪力引起的高频震荡。
4、但是,由于现在传统的控制器无法区分扰动类型,无法针对扰动类型做出具有针对性的控制,并且传统非线性误差反馈控制律中使用fal函数,在输入过大时,增益变化缓慢,在接近阈值时容易产生大幅度变化,控制较为粗糙,位置保持效果时好时坏,波动性较大。
5、因此,如何对扰动类型做出具有针对性的控制,并降低非线性误差反馈控制律的波动以便于提升rov位置保持效果,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种改进型rov位置保持自抗扰控制器及控制方法以解决背景技术中提到的技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
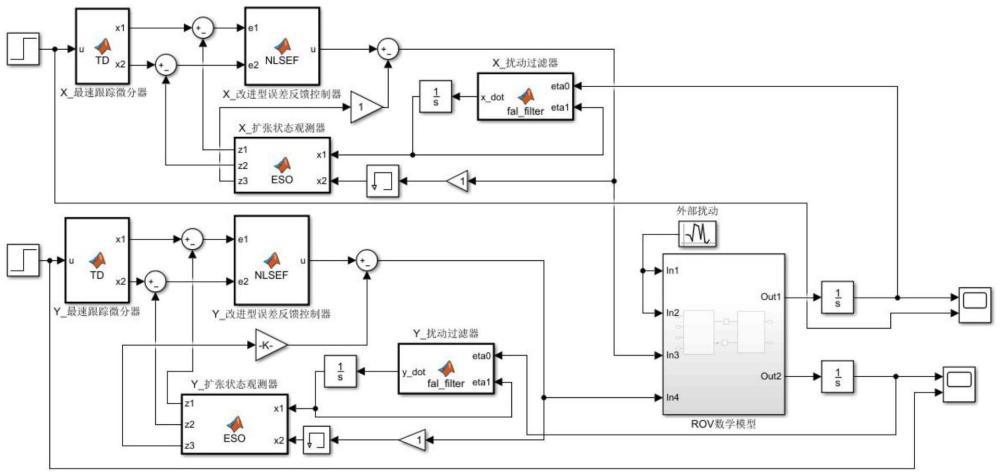
3、一种改进型rov位置保持自抗扰控制器,包括rov数学模型主控芯片、x通道子控制器和y通道子控制器,x通道子控制器和y通道子控制器均包括最速跟踪微分器、改进型误差反馈控制器、扩张状态观测器和扰动过滤器;
4、rov数学模型主控芯片的第一输入端为x通道外部扰动信号,第二输入端为y通道外部扰动信号,第三输入端为x通道控制信号,第四输入端为y通道控制信号,第一输出端为x通道位置信号,第二输出端为y通道位置信号;
5、扰动过滤器的输入端为x通道位置信号、y通道位置信号和位置反馈信号,输出端为过滤高频扰动后的位置信号;
6、扩张状态观测器的第一输入端为过滤高频扰动后的位置信号,第二输入端为控制量反馈信号,第一输出端和第二输出端为系统内部状态变量,第三输出端为系统扰动观测值;
7、最速跟踪微分器的输入端为目标位置信号,最速跟踪微分器的第一输出端为位置跟踪信号,第二输出端为位置跟踪微分信号;
8、改进型误差反馈控制器的第一输入端为位置跟踪信号与系统内部状态变量的误差信号,第二输入端为位置跟踪微分信号与系统内部状态变量的微分误差信号,根据误差信号与位置误差阈值的大小采取分段控制策略,输出x通道初步控制量和y通道初步控制量;
9、x通道初步控制量和y通道初步控制量分别与系统扰动观测值经补偿后的补偿值作和,作为最终控制量输入rov数学模型主控芯片的第三输入端和第四输入端。
10、优选的,改进型误差反馈控制器采取的分段控制策略具体为:
11、当误差信号大于位置误差阈值时,切换到定点航行模式,采取pd控制策略,快速朝着目标位置前进;
12、当误差信号小于位置误差阈值时,采取基于双曲余切函数的非线性组合控制策略,使输出趋近于上下限值。
13、优选的,分段控制策略的函数为:
14、
15、其中,u0为初步控制量,θ为位置误差阈值,e1为位置跟踪信号与系统内部状态变量的误差信号,e2为位置跟踪微分信号与系统内部状态变量的微分误差信号,k1为位置误差比例系数,k2为微分误差比例系数。
16、优选的,扰动过滤器采用fal函数设计滤波器,具体为:
17、
18、其中,fal函数为:
19、
20、其中,η0为位置输入信号,η1为位置反馈信号,k*fal(x,a,δ)为经过高频扰动过滤之后的位置微分信号,经过积分后得到位置信号,k为调节系统响应速度的比例系数,e为目标期望值和系统实际输出的误差值,a为常值,用于调节系统非线性特性,δ为误差阈值,x为位置反馈值,等于η1。
21、优选的,扰动过滤器的原理为:
22、当|e|>δ时,非线性反馈为k*|e|asign(e),使系统状态迅速逼近输入信号,从而使误差e趋近于δ;
23、当|e|≤δ时,非线性反馈为令带入扰动过滤器结构式中并改写为传递函数形式:
24、
25、即为一个低通滤波器,用于过滤掉高频扰动。
26、优选的,最终控制量通过初步控制量u0与系统扰动观测值和补偿因子b1的乘积作和得到;
27、扩张状态观测器第二输入端的控制量反馈信号为初步控制量乘以一个放大系数b2;
28、b1和b2互为倒数。
29、一种改进型rov位置保持自抗扰控制方法,基于所述的一种改进型rov位置保持自抗扰控制器,包括:
30、获取x通道外部扰动信号和y通道外部扰动信号,通过rov数学模型输出x通道位置信号和y通道位置信号;
31、将x通道位置信号和y通道位置信号分别过滤高频扰动后的位置信号输入扩张状态观测器,输出两个系统内部状态变量以及系统扰动观测值;
32、获取目标位置信号经最速跟踪微分器输出位置跟踪信号和位置跟踪微分信号;
33、计算位置跟踪信号与系统内部状态变量的误差信号,以及位置跟踪微分信号与系统内部状态变量的微分误差信号,根据误差信号与位置误差阈值的大小采取分段控制策略,输出x通道初步控制量和y通道初步控制量;
34、x通道初步控制量和y通道初步控制量分别与系统扰动观测值经补偿后的差值作为x通道和y通道的最终控制量信号输入rov数学模型对rov进行控制。
35、优选的,改进型误差反馈控制器采取的分段控制策略具体为:
36、当误差信号大于位置误差阈值时,切换到定点航行模式,采取pd控制策略,快速朝着目标位置前进;
37、当误差信号小于位置误差阈值时,采取基于双曲余切函数的非线性组合控制策略,使输出趋近于上下限值
38、优选的,所述的一种改进型rov位置保持自抗扰控制方法,还包括:
39、通过初步控制量与系统扰动观测值和补偿因子b1的乘积作和得到最终控制量;
40、初步控制量乘以一个放大系数b2作为扩张状态观测器的控制量反馈信号;
41、b1和b2互为倒数。
42、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种改进型rov位置保持自抗扰控制器及控制方法,以位置误差为判断条件,当位置误差大于误差阈值时,采取pd控制,使rov快速逼近目标位置,节省时间,并且相比较于传统非线性控制律,调节参数少,控制简单;当位置误差小于误差阈值时,采取双曲余切函数,利用双曲余切函数饱和性和对称性,使得无论是超过目标点还是未到达目标点,推进器都能做出相同反应,并且推进器转速具有上下限,适合在小范围内调节位置;
43、利用fal函数滤波器对获得的位置信号进行滤波,过滤掉与rov位置变化无关的高频扰动,只针对主要引起位置变化的低频扰动进行控制,控制更具有针对性,控制效果更好。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149167.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表