基于三维点云特征点匹配的工业车辆部件自动喷漆方法
- 国知局
- 2024-07-31 22:59:02
本发明涉及机器人自动喷漆,尤其涉及了一种基于三维点云特征点匹配的工业车辆部件自动喷漆方法。
背景技术:
1、在汽车制造及其它相关工业车辆制造行业中,自动喷漆作为生产过程中的重要一环,其质量直接影响到最终产品的外观和质量。传统的自动喷漆技术主要依赖预设程序控制喷漆机器人的运动路径和喷涂动作。这些预设路径通常是基于车辆部件在设计上的理想位置进行的,然而在实际生产过程中,由于定位误差、生产批次之间的轻微差异或者装配偏差,部件的实际位置和方向可能会与预设的路径出现不一致,导致喷漆不均匀或涂层厚薄不符合标准。
2、近年来,随着三维扫描技术和计算机视觉技术的发展,如何利用三维点云数据来更准确的匹配和识别工业车辆部件成为可能,提高自动喷漆的精度和效率。然而,现有的技术在特征点提取、特征点描述、匹配效率、以及如何将匹配结果有效应用于喷漆系统中等方面,仍然存在着一定的局限性。
技术实现思路
1、为了解决背景技术中的问题,本发明所提供一种基于三维点云特征点匹配的工业车辆部件自动喷漆方法。利用三维点云数据,将特征点提取、特征点描述、匹配效率、以及将匹配结果有效应用于喷漆系统中,克服了目前机器人自动喷漆技术对待喷漆工业车辆部件由于匹配和识别不精确导致的喷漆效果较差的问题。
2、本发明采用的技术方案是:
3、1)根据多个待喷漆工业车辆部件训练样品,构建每一个待喷漆工业车辆部件训练样品的待喷漆工业车辆部件训练样品点云,采用线性插值方法规划喷漆机器人对于每一个待喷漆工业车辆部件训练样品点云的自动喷雾路径;
4、2)针对待喷漆工业车辆部件测试样品和多个待喷漆工业车辆部件训练样品点云,处理得到最佳点云特征向量集合,再利用相似度聚合方法计算得到路径转换参数;
5、3)根据路径转换参数将最佳点云特征向量集合对应的待喷漆工业车辆部件训练样品点云的自动喷雾路径转换为待喷漆工业车辆部件测试样品的自动喷雾路径,实现车辆部件的自动喷漆。
6、所述步骤2)中:
7、2.1)使用3d相机对待喷漆工业车辆部件测试样品进行拍照得到待喷漆工业车辆部件测试样品的3d图像,采用3d哈里斯方法(harris 3d)分别提取待喷漆工业车辆部件测试样品的3d图像的特征点集和每个待喷漆工业车辆部件训练样品点云的特征点集,再利用特征描述子方法(shot)分别对待喷漆工业车辆部件测试样品3d图像和每个待喷漆工业车辆部件训练样品点云的特征点集均进行处理,分别得到3d图像的特征点集的3d图像特征向量集合和每个待喷漆工业车辆部件训练样品点云的特征点集的点云特征向量集合;
8、2.2)采用快速最近邻搜索方法,将一个点云特征向量集合中的一个特征向量和3d图像特征向量集合中的一个特征向量进行匹配,当匹配成功时,得到由点云特征向量集合中的特征向量和3d图像特征向量集合中的特征向量构成的一个特征向量对;当匹配失败时,点云特征向量集合中的特征向量和3d图像特征向量集合中的特征向量不构成特征向量对;
9、进而一个点云特征向量集合中的每个特征向量和3d图像特征向量集合中的每个特征向量进行匹配,将匹配成功得到的多对特征向量对构成一组特征向量对组,进而多个点云特征向量集合中的每个特征向量和3d图像特征向量集合中的每个特征向量进行匹配,得到匹配成功的多组特征向量对组,其中每组特征向量对组的特征向量对数量不同;
10、通过计算每组特征向量对组中每对特征向量对中的两个特征向量之间的欧式距离,将每组特征向量对中所有特征向量对的欧式距离求和后的平均值作为匹配质量,欧氏距离求和后的平均值越低,匹配质量越高,根据以下公式计算得到最佳点云特征向量集合;
11、g=0.6s+0.4c
12、其中,g为特征向量匹配参数,s为每组特征向量对组中特征向量对的数量,c为匹配质量,最终将特征向量匹配参数分值最高的一个点云特征向量集合作为最佳点云特征向量集合。
13、所述步骤2)中,再利用相似度聚合方法计算得到路径转换参数具体为:
14、通过向量相减取模公式计算最佳点云特征向量集合中的每个特征向量对于3d图像特征向量集合中的每个特征向量的相似度向量dn,向量相减取模公式的设置如下:
15、dn=||bj-ai||
16、其中,bj为最佳点云特征向量集合中第j个特征向量,ai为3d图像特征向量集合中第i个特征向量,j和i分别为正整数;
17、当相似度向量小于设定的阈值时,则将满足条件的相似度向量集合为特征相似集合,在特征相似集合里选取三个以上的相似度向量后,利用选取后的相似度向量并采用采样一致性方法计算得到旋转矩阵和平移向量作为路径转换参数。
18、所述步骤3)具体为:
19、根据旋转矩阵和平移向量,采用迭代最近点icp方法,并根据均方误差函数计算得到最优的旋转矩阵和平移向量,根据最优的旋转矩阵和平移向量并利用路径转换公式,将最佳点云特征向量集合对应的待喷漆工业车辆部件训练样品点云的自动喷雾路径转换为待喷漆工业车辆部件测试样品的自动喷雾路径,实现车辆部件的自动喷漆;
20、所述的路径转换公式设置如下:
21、o′=o*r+t
22、其中,o′为待喷漆工业车辆部件测试样品轨迹点坐标,o为最佳点云特征向量集合对应的待喷漆工业车辆部件训练样品轨迹点坐标,r为旋转矩阵,t为平移向量。
23、所述步骤1)中,生成多个待喷漆工业车辆部件训练样品点云后,对生成的待喷漆工业车辆部件训练样品点云进行体素滤波下采样的处理,保留具有完整特征的训练样品点云进行路径规划。
24、本发明的有益效果是:
25、1、本发明在喷漆作业流程中集成了三维点云匹配技术,实现了更高程度自动化的喷漆机器人自动喷漆作业,减少了对工人技能的依赖,同时也降低了人工误差。
26、2、本发明减少了工作人员接触有害喷漆材料的需要,以此提升工作环境的安全性。
技术特征:1.一种基于三维点云特征点匹配的工业车辆部件自动喷漆方法,其特征在于,方法包括以下步骤:
2.根据权利要求1所述的基于三维点云特征点匹配的工业车辆部件自动喷漆方法,其特征在于:
3.根据权利要求1所述的基于三维点云特征点匹配的工业车辆部件自动喷漆方法,其特征在于:
4.根据权利要求1所述的基于三维点云特征点匹配的工业车辆部件自动喷漆方法,其特征在于:所述步骤2)中:
5.根据权利要求1所述的基于三维点云特征点匹配的工业车辆部件自动喷漆方法,其特征在于:
6.根据权利要求1所述的基于三维点云特征点匹配的工业车辆部件自动喷漆方法,其特征在于:
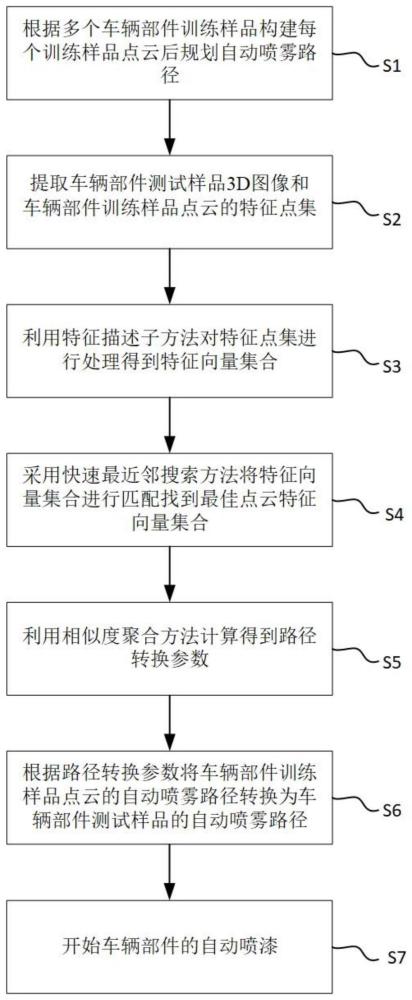
技术总结本发明公开了一种基于三维点云特征点匹配的工业车辆部件自动喷漆方法。根据车辆部件训练样品构建训练样品点云后规划自动喷雾路径,提取车辆部件测试样品3D图像和车辆部件训练样品点云的特征点集,再利用特征描述子方法对特征点集进行处理得到特征向量集合,采用快速最近邻搜索方法将特征向量集合进行匹配找到最佳点云特征向量集合,利用相似度聚合方法计算得到路径转换参数,根据路径转换参数将车辆部件训练样品点云的自动喷雾路径转换为车辆部件测试样品的自动喷雾路径,实现车辆部件的自动喷漆。本发明在喷漆作业流程中集成了三维点云匹配技术,实现了更高程度的自动化,减少了对工人技能的依赖,同时也降低了人工误差。技术研发人员:黄峰,殷家兴,章皓,马宇馨,李其朋受保护的技术使用者:浙江科技大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表