识别水平的行车道标记的方法与流程
- 国知局
- 2024-07-31 23:10:49
本发明涉及一种用于识别水平的行车道标记并且确定其走向的方法。此外,本发明附加地涉及一种用于训练卷积神经网络的方法,所述卷积神经网络用于求取水平的行车道标记及其走向。
背景技术:
1、随着车辆功能的越来越高程度的自动化,车道和其他行车道标记的识别变得越来越重要。在此重要的是,能够通过车辆正确且快速地识别各种行车道标记。
2、de 10 2004 057 188 a1公开一种用于支持车辆的行驶的设备。由ccd摄像机拍摄车辆的前方场景作为图像。将每个水平行中的为车辆行驶所需要的数量的像素(bildelementen)存储,并且基于在图像中未停放有车辆的道路的像素的数量与每个水平行的像素的数量的比值,基于该车辆的宽度来确定该车辆是否能够从停泊的车辆旁边驶过。
3、在ep 3 410 398 a1中公开一种用于识别道路信息的系统,该系统能够确定在变道后在车道的另一侧的车道标记的位置。该系统在此包括用于识别前方车道标记的装置、用于识别侧边车道标记的装置和用于估计在变道后处于车道的另一侧的前方车道标记的装置。
技术实现思路
1、本发明所基于的任务在于,给出一种方法,借助该方法能够在减少运行时间的情况下识别水平的道路标记。
2、该任务通过根据本发明的一种用于识别水平的行车道标记并且确定其走向的方法解决。此外,本发明给出一种用于训练卷积神经网络的方法。优选实施方式从本说明书中得出。
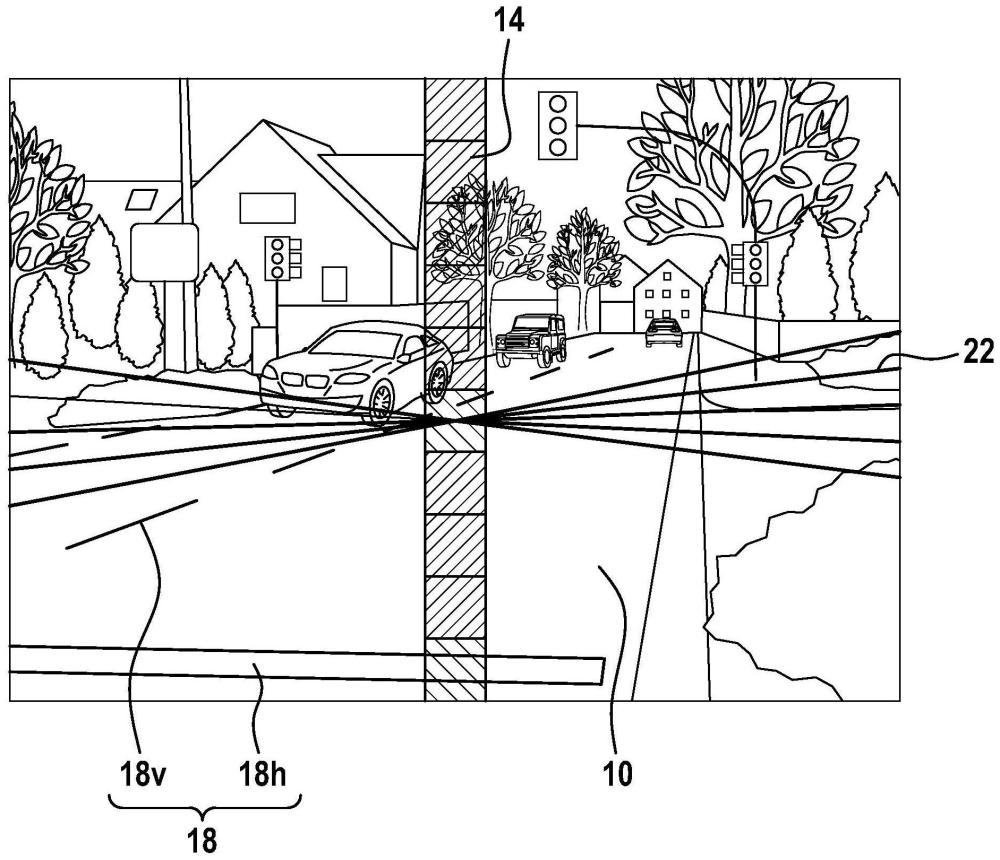
3、本发明给出一种用于识别水平行车道标记并且确定其走向的方法。该方法在此包括如下步骤:检测行车道的图像,和将该图像的中心区域划分成竖直叠置地布置的多个单元并且为每个单元配属预限定的并且围绕水平方向不同地取向的线。该图像在此优选借助车辆的摄像机检测。由于水平行车道标记、例如停车线等通常至少与该图像的中心区域交叉,所以不必进行对该图像的完整的分析处理,使得计算开销由于仅对中心分析处理而显著地减少。相应地缩短用于这种方法的运行时间。
4、由于水平行车道标记不是必需一定在图像中水平地被示出,所以预给定一些能够相应于行车道标记的线。这些预限定的线因此围绕水平方向取向。例如,这些线可以相对于水平方向在-30°与+30°之间以10°的步距布置。因此,更算是垂直取向的行车道标记会完全不同于这些预限定的线。
5、在另一步骤中,为每个单元的每个线计算存在行车道标记的至少一个概率值和所述线相对于该行车道标记的偏移值。在此将如下值理解为概率值:该值不仅说明是否一般性地存在行车道标记,而且说明该行车道标记与分别预给定的线在怎样的程度上相似。因此能够通过该概率值对这些不同的线进行加权,使得存在标准,根据该标准能够决策,应从哪个线出发以代表行车道标记。
6、偏移值在此是如下值:线的特定的点必须偏移一个怎样的量值,以便达到行车道标记。在此有利的是,为这些特定的点确定该线与该行车道标记之间的欧氏距离,该距离相应于所述偏移值。因此,通过所述偏移值说明如下值:线必须偏移一个怎样的量值,以便达到实际的行车道标记。
7、随后于此,将所述概率值和所述偏移值输入计算函数中,并且输出至少一个线。例如,该计算函数在此是一种算法,该算法根据概率值和偏移值来选择最算是相当于与水平行车道标记的线。该线在此是最佳开始点,从该点出发以便达到行车道标记的实际走向。
8、最后,由所述至少一个线和所述偏移值来确定水平行车道标记的走向。相应地通过将偏移值应用到该线上来获得水平行车道标记的真实走向。
9、在本发明的一种优选实施方案中,这些步骤借助经训练的卷积神经网络来执行。通过经训练的卷积神经网络,基于训练例来创建通用模型。在训练之后,这样的网络因此能够快速且简单地探测水平行车道标记的实际走向。这在此尤其是可以在行驶期间持续地执行。
10、在本发明的另一优选实施方案中,将至少一个非最大值抑制(non-maximumsuppression)函数用于计算函数。在非最大值抑制函数中,由偏移值来计算行车道标记的所有候选并且计算线走向。随后,选择具有最高概率值的候选。从该候选出发来计算与所有其他候选的相似性。如果候选的相似性会大于边界值,则将这些候选去除。这些步骤从次最高的候选出发针对所有剩余的候选这样久地重复,直至应没有候选存在。通过分别从最高的概率出发,还能够在一个图像中识别多个水平行车道标记。
11、优选地,随着计算存在行车道标记的概率值,附加地计算存在虚线行车道标记和/或实线行车道标记的概率。因此识别不同的线。由此例如可以实现,将斑马线或人行横道与停止线区分。
12、在一种有利的扩展方案中,附加地计算行车道标记是否处于本车辆的行车道上的概率。特别是将本车辆在其中行驶的车道理解为行车道。通过计算这种概率能够评价:水平行车道标记是否对于该本车辆的轨迹规划是相关的。由此能够忽略不在本车辆的行车道上的水平行车道标记。
13、优选地,附加地确定其他的水平地存在的结构的概率。水平地存在的结构理解为路缘石、道口栏杆等。由于这些结构同样表示在图像中并且在该方法中被识别,所以可以通过概率计算将这些水平结构与行车道标记区分。由此改善对不同对象的区分。
14、本发明附加地说明一种用于训练卷积神经网络的方法,所述卷积神经网络用于求取水平行车道标记及其走向。在第一步骤中,输入训练数据,这些训练数据至少包括图像数据,所述图像数据具有至少一个具有已知走向的水平行车道标记。根据已知的训练数据这样久地训练网,直至能够正确地预测所有的行车道标记和走向。在训练中,在卷积神经网络中这样久地匹配模型,直至获得正确的结果。在训练后,则可以实现,借助该模型在未知的图像数据的情况下也能确定水平行车道标记及其走向。
15、在另一步骤中,将该图像的中心区域划分成竖直叠置地布置的多个单元,并且为每个单元配属预限定的并且围绕水平方向不同地取向的线,并且根据相似性函数将所述线配属于至少一个存在的行车道标记。这些步骤在此范围内相当于用于识别水平行车道标记的方法,从而参考针对该方法的说明。
16、随后,为每个单元的每个线计算存在行车道标记的概率值和所述线相对于潜在的行车道标记的偏移值,并且比较所述概率值和所述偏移值与所配属的行车道标记的实际值。在此,仅在根据概率值存在行车道标记的情况下计算偏移值。否则不计算偏移值。在比较所述概率值和所述偏移值与所述实际值时,计算这些值之间的偏差。
17、在另一步骤中,将借助成本函数来评估该偏差。该成本函数是用于评估卷积神经网络的算法怎样好地将训练数据集建模的方法。
18、以如下目的改变表征模型行为的参数:使得在通过卷积神经网络对训练数据进一步处理时预期改善通过成本函数进行的评估,并且如果所求得的精度系数达到预确定的值则释放对概率值的和偏移值的求取。在此将这样的特定值或者还有边界值理解为精度系数:在该特定值或边界值的情况下在进一步训练时不能达到进一步的改善。
19、本发明所基于的任务附加地通过一种控制设备来解决,该控制设备设置为用于执行根据本发明的方法。
20、先前描述的方法特别是例如可以是计算机实现的,并且因此体现在软件中。本发明因此还涉及一种计算机程序,该计算机程序包含机器可读的指令,当在一个或多个计算机上执行所述指令时,所述指令促使所述一个或多个计算机实施所描述的方法。
21、同样,本发明还涉及一种具有该计算机程序的机器可读的数据载体和/或下载产品。下载产品是可通过数据网络传递、即可由数据网络的用户下载的数字产品,其例如可以在网上商店中被出售用于立即下载。
22、这样的计算机程序可以在一个或多个计算机上运行,这些计算机例如布置在云中。通过这种在云中运行的计算机实现关于本方法提到的优点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196261.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表