变换系数自适应的运控系统退绕式旋转轴超柔性控制方法与流程
- 国知局
- 2024-07-31 23:29:47
本发明属于工业运动控制领域,具体涉及一种变换系数自适应的运控系统退绕式旋转轴超柔性控制方法。
背景技术:
1、可编程逻辑控制器(plc)是现在工业自动化的重要支柱,运动控制作为现代高性能plc的重要功能之一,广泛应用于汽车制造、食品包装、机械加工、印刷、光伏锂电等领域。运动控制系统(简称运控系统)通常包括运动控制器、驱动器、电机、机械执行器以及反馈单元等。在实际加工生产中,需要将用户单位,如圈数、度、厘米、英寸、毫米、瓶数、张数等,与控制器内部控制计数单位之间相互转换,并作用于控制器内部的运动轨迹规划器进行点位运动规划,把规划轨迹下发驱动器控制电机轴带动机械设备运动进行符合要求的加工生产。通常,通过人为手动直接输入变化系数(如转换常数、位置退绕值、驱动分辨率等),如果输入的变换系数不合理会造成周期性的累积计数误差,如某生产设备的电机轴直接驱动配有三个灌装器的旋转装置,轴每转一圈可灌装生产三件产品,设置位置单位为灌装件数,由于默认驱动分辨率值为106p/r(脉冲计数/每转),由此可得转换常数为106/3脉冲计数/件。在每个产品灌装周期执行一次复位时,会造成每个周期积累1/3的计数误差,进而会影响加工精度和质量。变换系数的设定需要经过用户精准的计算,大大降低了系统使用的用户友好性。
2、此外,实际生产中通常会有循环生产线,如卫材生产、白酒包装、生物制药等,通常会有一条循环生产线,这就需要生产设备进行旋转轴运行控制,这些循环生产线会根据不同的工艺要求采用不同的机械结构,通常生产设备的运动模式为增量式和绝对式,但如果有的循环产线有特殊的工艺要求只能进行正向旋转循环运行,若强行或误操作进行反向旋转运行,可能会导致机械结构受损,生产设备。有的循环生产线可能支持双向旋转运动,此时若仅支持一个方向的旋转运动可能会导致运动位移过大,这将导致生产效率大大降低。在实际生产加工中需要对电机驱动轴进行加减速控制以减小启停时的冲击,提升加工精度和质量。传统的梯形和指数型加减速控制实现简单,但加速度不连续存在突变,存在较大的柔性冲击。为了减小柔性冲击,提升加工精度,通常使用柔性加减速控制方法,基于三角函数的改进柔性加减速控制方法虽能平滑运动曲线,但三角函数计算复杂耗时,难以保证运控系统的实时性。常用的七段式s型柔性加减速控制方法通过将整个加减速过程分为加加速段、恒加速段、减加速段、恒速段、加减速段、恒减速段、减减速段共7个阶段,来保证整个运动过程中加速度的连续性。虽然七段式s型加减速控制方法保证了整个规划过程中加速度的连续性,但是其曲线规划分类情况多,且规划参数需要多次开方以及二分法等数值方法才能得到,计算量大,运算复杂,且加加速度存在突变,在一些高精度要求的应用场合还是会存在余振,难以满足高精度高柔性的控制要求。
3、申请人初步检索,公开号为cn104298114a,主题名称为自适应鲁棒s型速度规划算法的发明专利申请,公开日为20150121,ipc分类号为g05b13/04、g05d1/02。该发明专利申请,主要公开了“对给定任意的首末速度和位移、最大加速度和加加速度以及运动速度都能正常规划出s型的速度曲线”“把规划分解为两个层面进行处理,即速度规划层和位移规划层。速度规划层作为最底层的功能,根据给定的首末速度进行变速规划,得到变速的轨迹数据;位移规划层通过解析法或者数值法得到满足给定位移的整体轨迹数据”。
4、此外,公开号为cn102360198a,主题名称为数控系统中操作设备的速度规划方法、装置及数控机床的发明专利申请,公开日为20120222,ipc分类号为g05b19/19。该发明专利申请,主要公开了“现有技术中的采用的方法是:首先对设定路径进行判断,计算整个规划过程中含有哪几个有效阶段,然后再按照相应的阶段配置,根据不同的数学模型计算整个加减速过程的相关参数,而这种方法最终得到的是高次方程组,如果要进行精确的计算则需要解带根号的3次方程组,使得整个规划过程的计算量变得巨大,规划过程复杂,并且很难达到各个阶段的路径长度满足插补周期的整数倍的要求,会出现速度跳变的问题”“在整个速度规划的过程中,以实现s型曲线的典型7段规划或5段规划为目的,将设备在加加速阶段、匀加速阶段和减加速阶段的运动路径统一设定为加速路径,将设备在减减速阶段、匀减速阶段和加减速阶段运动的路径统一设定为减速路径,这样在后续的规划过程中只需通过比较操作设备加速路径与减速路径之和与实际加工路径的大小来对当前的指定速度进行调整即可”。
5、以上两个专利仅仅涉及常用的线性轴加减速控制,并未涉及任何旋转轴控制。一种变换系数自适应的运控系统退绕式旋转轴超柔性控制,目前关于运动控制的技术和资料还没有公开的转化方法。因此,亟待一种用户仅需输入生产需求关系即可以实现变换系数的自适应计算,能进行多种运动模式的旋转轴控制,并能进行基于九次多项式的曲线规划,实现超柔性加减速控制的方法,以提升系统的用户友好性、运行效率、加工精度、加工质量、稳定性和安全性。
技术实现思路
1、本发明针对现有技术的状况,克服以上缺陷,提供一种变换系数自适应的运控系统退绕式旋转轴超柔性控制方法。
2、本发明公开的变换系数自适应的运控系统退绕式旋转轴超柔性控制方法,主要目的在于,用户仅需输入生产需求关系即可以实现变换系数的自适应计算,能进行多种运动模式的旋转轴控制,并能进行基于九次多项式的曲线规划,可直接计算出规划参数的解析解,保证规划过程中速度、加速度、加加速度、加加加速度的连续性,实现超柔性加减速控制,提升系统的用户友好性、运行效率、加工精度、加工质量、稳定性和安全性。
3、本发明公开的变换系数自适应的运控系统退绕式旋转轴超柔性控制方法,用于解决在运控系统中的变换系数设定以及旋转轴控制等问题。
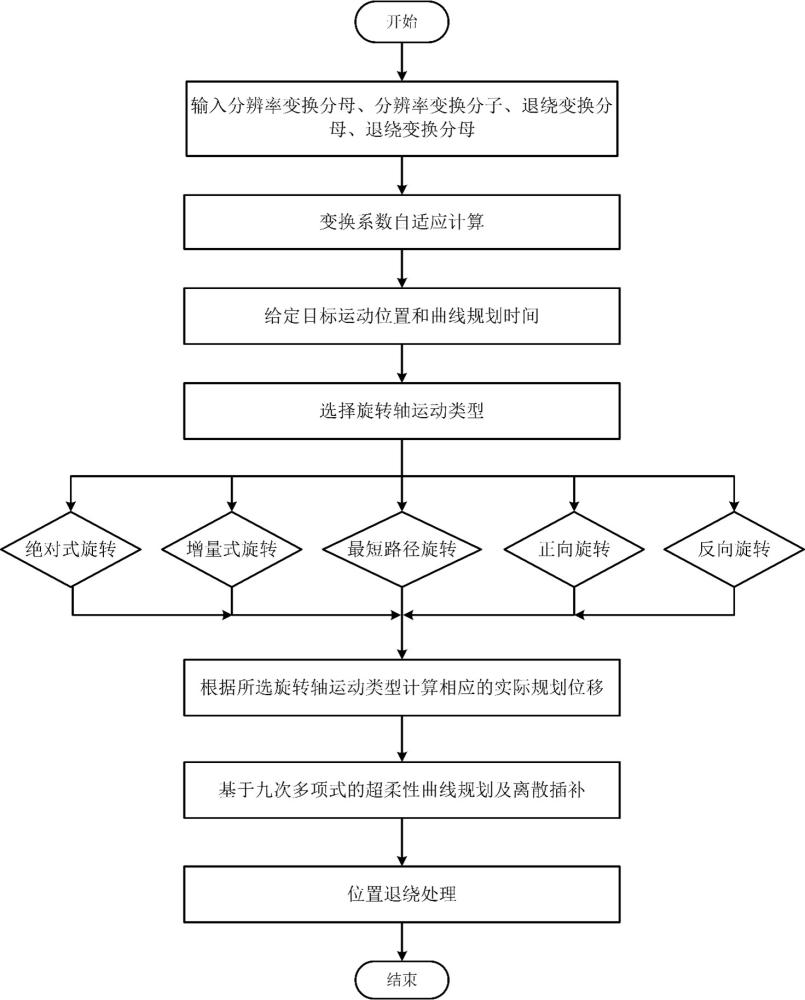
4、本发明采用以下技术方案,所述变换系数自适应的运控系统退绕式旋转轴超柔性控制方法,包括以下步骤:
5、步骤s1:向plc控制器输入生产需求关系参数,生产需求关系参数包括分辨率变换分子rn、分辨率变换分母rd、退绕变换分子un、退绕变换分母ud,其中:rd和rn对应位置单位和电机圈数的关系,每rn个位置单位,电机转rd圈;un和ud对应循环退绕值和位置单位的关系,每ud个循环退绕,轴运动un个位置单位;
6、步骤s2:进行变换系数的自适应计算,变换系数包括最大分辨率rmax、基本分辨率rb、默认分辨率rp、驱动分辨率rm、转换常数ct、退绕分辨率uw,其中:
7、(1);
8、(2);
9、(3);
10、(4);
11、(5);
12、步骤s3:给定目标运动位置st、曲线规划时间tm;
13、步骤s4:选择旋转轴运动模式,旋转轴运动模式包括绝对式旋转运动模式、增量式旋转运动模式、最短路径旋转运动模式、正向旋转运动模式、反向旋转运动模式,其中:
14、绝对式旋转运动模式:
15、绝对式旋转的运行方向取决于轴的当前位置,如果开始位置小于结束位置,会生成正向的运动;如果开始位置大于结束位置,则会生成反向的运动;如果位置大于位置退绕值,轴在到达绝对位置时运动会超过一圈;
16、增量式旋转运动模式:
17、增量式旋转运动模式的运行方向取决于增量位置s的符号,若增量位置s大于零,会生成正向的运动;若增量位置s小于零,会生成反向的运动;如果增量位置大于位置退绕值,轴在到达目标位置时运动会超过一圈;
18、最短路径旋转运动模式:
19、最短路径旋转运动模式沿最短方向运行到目标位置,不受当前位置影响,第一预设条件时会经过零点,且单次运动中不会超过1/2的循环退绕值;
20、正向旋转运动模式:
21、正向旋转运动模式只沿正向运动到目标位置,不受当前位置影响,第二预设条件时会经过零点;
22、反向旋转运动模式:
23、反向旋转运动模式只沿反向运动到目标位置,不受当前位置影响,第三预设条件时会经过零点;
24、步骤s5:根据所选旋转轴运动模式计算相应的实际规划位移,其中:
25、令实际规划位移为sp;
26、绝对式旋转运动模式:
27、设sc为系统当前位置,如果st>sc,则进行正方向运动,实际规划位移sp=st-sc;如果st<sc,则进行负方向运动,实际规划位移sp=st-sc;
28、增量式旋转运动模式:
29、增量式旋转运动模式下,直接将目标运动位置st赋值给实际规划位移sp,sp=st;
30、最短路径旋转运动模式:
31、令su为循环退绕值,并将un赋值给su,su=un;
32、如果|st-sc|≤su/2,sp=st-sc;
33、如果|st-sc|>su/2,sp=(st-sc)-su* sign(st-sc);其中, sign(•)为符号函数;
34、正向旋转运动模式:
35、如果st-sc<0,sp=(st-sc)+su;如果st-sc>0,sp=st-sc;
36、反向旋转运动模式:
37、如果st-sc>0,sp=(st-sc)-su;如果st-sc<0,sp=st-sc;
38、步骤s6:利用步骤s2得到的变换系数、步骤s3给定的曲线规划时间tm、以及步骤s5得到的实际规划位移sp,进行九次多项式的超柔性曲线规划,其中:
39、令位置表达式s(t)为关于时间的九次多项式,对s(t)一次求导以得速度表达式为v(t),对s(t)二次求导以得加速度表达式为a(t),对s(t)三次求导以得加加速度表达式为j(t),对s(t)四次次求导以得加加加速度表达式为k(t),具体如式(6)所示:
40、(6);
41、其中,a0、a1、a2、a3、a4、a5、a6、a7、a8、a9为多项式系数,t为时间参数;
42、给定边界约束条件:
43、(7);
44、将式(7)的十个边界约束条件代入式(6)以得关于[a0,a1,a2,a3,a4,a5,a6,a7,a8,a9]的线性方程组,转换成矩阵形式如下:
45、m* a= b (8);
46、其中,m为10×10的系数矩阵; a=[a0,a1,a2,a3,a4,a5,a6,a7,a8,a9]-1为求解参数矩阵; b=[0,0,0,0,0,sp,0,0,0,0]-1为常数项矩阵;
47、通过在式(8)两边同时左乘m-1以确定 a,确定式(6)的多项式系数a0~a9,具体计算如下:
48、 a=m-1 b (9);
49、其中, m-1为m的逆矩阵;将式(9)代入式(6)以得到满足约束条件的曲线规划表达式;
50、步骤s7:通过控制周期ts对步骤6得到的曲线进行离散插补输出,具体表达式如下:
51、(10);
52、其中,ts为控制周期,ntsî[0,tm],n=1,2,3…为正整数;
53、通过步骤s6、步骤s7的曲线规划表示运行过程中速度、加速度、加加速度、加加加速度的连续性,以实现超柔性加减速控制。
54、作为以上技术方案的进一步优选技术方案,变换系数自适应的运控系统退绕式旋转轴超柔性控制方法还包括步骤s8,步骤s8位于步骤s7之后:
55、步骤s8:当进行循环旋转轴控制时,轴的显示位置范围应为[0, su],在轴完成一个机械周期时需要进行电子归位,对位置进行退绕处理,从而进行无限循环控制,其中:
56、设se为进行旋转轴控制运行后的实际位置;
57、当se>su时,;
58、当se<su时,;
59、其中,sd为经过退绕处理的位置; floor(•)为向下取整函数。
60、作为以上技术方案的进一步优选技术方案,第一预设条件具体实施为:旋转路径需要从循环退绕值穿越至0或从0穿越至循环退绕值。
61、作为以上技术方案的进一步优选技术方案,第二预设条件具体实施为:旋转路径需要从循环退绕值穿越至0。
62、作为以上技术方案的进一步优选技术方案,第三预设条件具体实施为:旋转路径从0穿越至循环退绕值。本发明公开的变换系数自适应的运控系统退绕式旋转轴超柔性控制方法,其有益效果在于:
63、1. 根据用户输入的生产需求关系即可以实现变换系数的自适应计算,提升系统的用户友好性。
64、2. 根据不同的生产工艺要求,能进行绝对式旋转、增量式旋转、最短路径旋转、正向旋转、反向旋转等多种运动模式旋转轴控制,提升系统的运行效率、稳定性和安全性。
65、3. 基于九次多项式的曲线规划,可直接计算出规划参数的解析解,保证规划过程中速度、加速度、加加速度、加加加速度的连续性,实现超柔性加减速控制,提升系统的加工精度和加工质量。
66、4. 系统在一个机械周期时完成时可进行电子归位,对位置进行退绕处理,提供无限的循环控制。
67、5. 本发明同样适用于如数控机床、机器人等其他运动控制系统。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197794.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表