一种球轮足机器人落地缓冲策略方法与流程
- 国知局
- 2024-07-31 23:36:43
本发明涉及机器人,具体为一种球轮足机器人落地缓冲策略方法。
背景技术:
1、随着人类探索脚步的延伸,如何应对机器人作业任务多样化、作业环境复杂化的挑战,成为了如今科技研发与工业应用的一大难题。智能无人装备在战场侦查、军事作战、灾害救援、环境探测等方面发挥着重要的作用。越来越多的智能无人系统代替人类去执行危险任务。面对着不同特征的应用环境,国内外开发了各种类型的机器人系统,以适应草地、沙石、沼泽、雪地等路况。智能无人系统在空间狭窄、支援困难、隐蔽性好的城市巷战、反恐抵近侦察环境中,难以发挥有效的作用。因此,迫切需要研制针对于城市巷战、反恐抵近侦察等狭窄封闭环境中执行任务的智能无人系统。
2、近年来,大量的两轮腿式机器人平台被设计出来。ascento是一种紧凑的两轮腿式机器人,可以在平坦的地形上快速移动,通过跳跃来克服障碍物,文章中使用了lqr算法来保持两轮腿式机器人的平衡。波士顿动力公司的hanlde也是一种两轮机器人,它利用车轮在崎岖的道路上快速移动,快速下楼梯,并跳过障碍物。wlr-ii是一种液压驱动的轮腿式机器人,可以实现上下斜坡、通过稍不平整的地面和搬运重物。ollie是腾讯公司设计研发的一种轮足机器人,其单腿采用并联机构,这让它的身体具有结构简单、动态性能高、爆发力强的特点。文章中使用了lqr方法的线性反馈控制器,保持机器站立的稳定。同时考虑了模型的非线性的稳定域,采用基于互联和阻尼分配的非线性控制器-无源性控制(ida-pbc)方法,使得机器人在更一般的场景下进行控制。
3、球轮腿式机器人结合了三者的优点,与多轮腿式机器人相比,球式机器人以其紧凑性和灵活性而著称,与传统的轮式、履带式移动机器人相比,球形机器人通过将重心设计在下半球体,具有“不倒翁”的特性,环境适应能力较强,且球形机器人的所有零件包括机械结构及控制系统等都位于球体内部,在特殊情况下行进时,可保护球体内部零件免受外界的影响。另外,球形机器人以滚动为主要的运动方式,通过球壳内部驱动装置的运动打破球体的静态平衡,可以实现零半径转向和全方向运动。其次,当球形机器人因外界因素翻滚倾倒时,可迅速从任一状态下调整机体姿态并恢复正常,这是足式机器人所不能比拟的。
4、在现有技术中,专利公开号为cn103407512a的发明专利,一种多态球形跳跃机器人,机器人的自动控制运行步骤中,机器人落地时,机器人呈圆球落地,依靠自身结构的特点实现滚动运动。但是在落地缓冲的过程中冲击力缓冲不完全,达到极限位置冲击力是存在是存在的,这样会损伤机器人,减少使用寿命。
技术实现思路
1、本发明所要解决的技术问题在于:解决现有的球轮腿式机器人落地时的冲击力缓冲不完全,损伤机器人,减少机器人的使用寿命问题。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一种球轮足机器人落地缓冲策略方法,包括以下步骤:
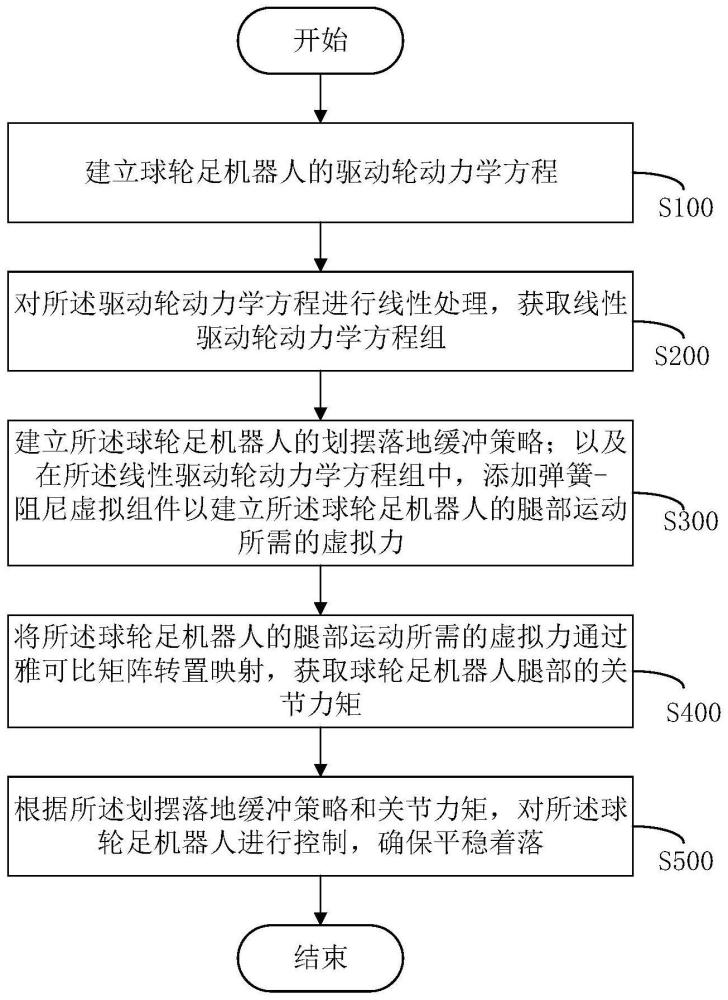
4、s100,建立球轮足机器人的驱动轮动力学方程;
5、s200,对所述驱动轮动力学方程进行线性处理,获取线性驱动轮动力学方程组;
6、s300,建立所述球轮足机器人的划摆落地缓冲策略;以及在所述线性驱动轮动力学方程组中,添加弹簧-阻尼虚拟组件以建立所述球轮足机器人的腿部运动所需的虚拟力;
7、s400,将所述球轮足机器人的腿部运动所需的虚拟力通过雅可比矩阵转置映射,获取球轮足机器人腿部的关节力矩;
8、s500,根据所述划摆落地缓冲策略和关节力矩,对所述球轮足机器人进行控制,确保平稳着落。
9、在本发明的一实施例中,建立驱动轮动力学方程包括:将所述球轮足机器人的轮式运动等效简化为摆长可变的双轮倒立摆模型;将双轮倒立摆模型分为左右驱动轮和机体两部分,并以左右驱动轮的轴心距离的中点为原点,建立xy轴坐标系,进行受力分析;
10、根据左驱动轮在x轴方向上的力平衡方程和左驱动轮的绕轮轴的力矩平衡方程,获取左驱动轮的动力学方程;同理获取右驱动轮的动力学方程;
11、根据机身加速度,并与左右驱动轮的动力学方程联立,获取左右驱动轮平衡方程;
12、将机体的质心与xy轴坐标系的原点连接,以机体的质心作为对象进行受理分析,获取机体部分的动力学方程;
13、根据所述左右驱动轮平衡方程和所述机体部分的动力学方程,获取球轮足机器人的驱动轮动力学方程。
14、在本发明的一实施例中,所述驱动轮动力学方程通过以下公式获取:
15、
16、式中,m表示为球轮足机器人身体质量,m表示为驱动轮质量,i表示为驱动轮转动惯量,r表示为驱动轮半径,表示为机体的加速度,tl表示为左驱动轮力矩,tr表示为右驱动轮力矩,l表示为机体的质心与左右驱动轮轴心距离中点的距离,表示为机体俯仰倾角加速度,表示为机体俯仰倾角速度,θ表示为机体俯仰倾角,sin表示为正弦函数,cos表示为余弦函数。
17、在本发明的一实施例中,所述获取线性驱动轮动力学方程组,包括:当球轮足机器人在平衡位置的机体俯仰倾角保持平衡,对机体俯仰倾角进行线性处理,获取线性驱动轮动力学方程组。
18、在本发明的一实施例中,所述机体俯仰倾角进行线性处理为:
19、
20、线性驱动轮动力学方程组通过以下公司获取:
21、
22、
23、式中,m表示为球轮足机器人身体质量,m表示为驱动轮质量,i表示为驱动轮转动惯量,r表示为驱动轮半径,表示为加速度,tl表示为左驱动轮力矩,tr表示为右驱动轮力矩,l表示为机体的质心与左右驱动轮轴心距离中点的距离,表示为机体俯仰倾角加速度,表示为机体俯仰倾角速度,θ表示为机体俯仰倾角,sin表示为正弦函数,cos表示为余弦函数,jz表示为机体绕z轴的转动惯量,g表示为重力加速度。
24、在本发明的一实施例中,所述划摆落地缓冲策略包括:
25、设置球轮足机器人的腿部电机的力矩阈值,并通过力矩阈值判断球轮足机器人是否处于悬空状态;
26、若力矩阈值在悬空力矩范围内,则此时球轮足机器人处于悬空状态;当球轮足机器人处于悬空状态时,则关闭球轮足机器人的控制系统;
27、若力矩阈值瞬时增大,则此时球轮足机器人处于落地缓冲阶段;当球轮足机器人处于落地缓冲阶段时,在落地的瞬间,控制球轮足机器人前跃,达到前跃位置后,将球轮足机器人的构形切换成球形向前滚动。
28、在本发明的一实施例中,建立球轮足机器人的腿部运动所需的虚拟力包括:设弹簧-阻尼虚拟组件的弹性系数为kp1,阻尼系数为kd1,则弹簧-阻尼虚拟组件在y轴方向上的虚拟力fy为:
29、
30、式中,yset表示为y轴方向期望值,y表示为y轴方向上的测量值,表示为y轴方向上的速度;
31、根据弹簧-阻尼虚拟组件在y轴方向上的虚拟力fy和所述线性驱动轮动力学方程组,获取球轮足机器人的左右驱动轮在y轴方向上的相互作用力。
32、在本发明的一实施例中,所述左右驱动轮在y轴方向上的相互作用力通过以下公式获取:
33、
34、式中,pl表示为左驱动轮在y轴方向上的相互作用力,pr表示为右驱动轮在y轴方向上的相互作用力,kd1表示为参数代号。
35、在本发明的一实施例中,所述球轮足机器人腿部的关节力矩通过以下公式获取:
36、
37、式中,tl表示为左驱动轮的驱动力矩,tr表示为右驱动轮的驱动力矩,pl表示为左驱动轮在y轴方向上的相互作用力,pr表示为右驱动轮在y轴方向上的相互作用力,j表示为雅可比矩阵,t表示为转置。
38、在本发明的一实施例中,球轮足机器人包括:壳体(100)和驱动轮组件(200);驱动轮组件(200)与壳体(100)连接,并且能够在壳体(100)内伸出或缩回;其中,驱动轮组件(200)包括腿部电机(210)、腿部件(220)和驱动轮(230);腿部电机(210)固定在壳体(100)内,腿部件(220)的两端分别与腿部电机(210)和驱动轮(230)。
39、与现有技术相比,本发明的有益效果是:设计收腿缓冲和球式融合的缓冲控制方法,基于变结构的控制策略在机器人落地缓冲过程中达到最优的控制效果,其特点在于在缓冲过程中利用腿部的划摆将垂直的冲击力进行分解,以达到缓冲的目的。针对机器人进行了仿真和实验验证,实验验证了机器人结构的可行性和控制器的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197965.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表