一种基于LADRC算法的无人艇航迹跟踪控制方法
- 国知局
- 2024-07-31 23:41:56
本发明属于无人艇航迹跟踪,尤其涉及一种基于ladrc算法的无人艇航迹跟踪控制方法。
背景技术:
1、在水面特殊和复杂的环境中,受自身动力学约束和水面恶劣环境影响,无人艇航迹控制面临严峻挑战。随着无人航运和智慧海事领域的快速发展,无人艇作为无人系统领域重要的发展方向日益收到各国的重视,并在理论与技术层面得到了突破性进展。无人艇的广泛使用有利于建立高效、低成本的海上运输及特种作业体系,能够极大地降低海上作业人力成本。在军事领域,无人艇可用于布放无人飞行器和潜航器执行侦察打击任务,实现零伤亡作战。在民用领域,无人艇可应用于海上搜救、海洋工程巡检、海洋牧场智能化巡视等领域,呈现出广阔的应用前景。
2、双电机差速无人艇作为一种自主化程度高的无人系统,在海洋网箱巡检方面应用广泛,但目前双电机差速无人艇还存在诸多问题。由于其工作环境面临风、浪、流耦合干扰,因此实现双桨差速无人艇稳定、高精度的航迹跟踪控制难度较大。
技术实现思路
1、本发明提供的一种基于ladrc算法的无人艇航迹跟踪控制方法,主要解决差速无人水面艇在水面环境扰动下航迹跟踪问题。
2、本发明提供的一种基于ladrc算法的无人艇航迹跟踪控制方法,包括将航迹控制拆解为航向控制和航迹跟踪;航向控制包括采用串级结构的航向控制器,增加航向控制器的外环比例,根据差速电机响应情况,调节外环航向角控制器比例系数;航迹跟踪由船载gps得到无人艇实际位置x、y,预设无人艇航路点为xd、yd,得到无人艇期望航向角根据los制导律设无人艇实时位置p=[xi,yi]t,且跟踪偏差为e=[s,e]t,其中s为沿向偏差,e分别为垂向偏差,偏转向量由坐标变换关系得到e=r(αk)t(pt-pk),其中r(αk)为转换矩阵展开e=r(αk)t(pt-pk),得到垂向偏差e(t)=-(xt-xk)sinαk+(yt-yk)cosαk;驱动无人艇依据期望航向角和垂向偏差抵达期望航路点并保持在期望航路点。
3、作为本发明的进一步优化,无人艇航点跟踪涉及直线路径时,期望航向公式满足y(e)=αk+yr(e),式中yr(e)=arctan(-e(t)/△),前向距离△设置为常数。
4、作为本发明的进一步优化,设计时变的前向距离,前向距离的值与垂向偏差e(t)和以pt为圆心,以r>0为半径的圆的大小关系相关;当|e(t)|>r时,前向距离△=0;当|e(t)|<r时,e(t)与r之间的关系e(t)2+△(t)2=r2。
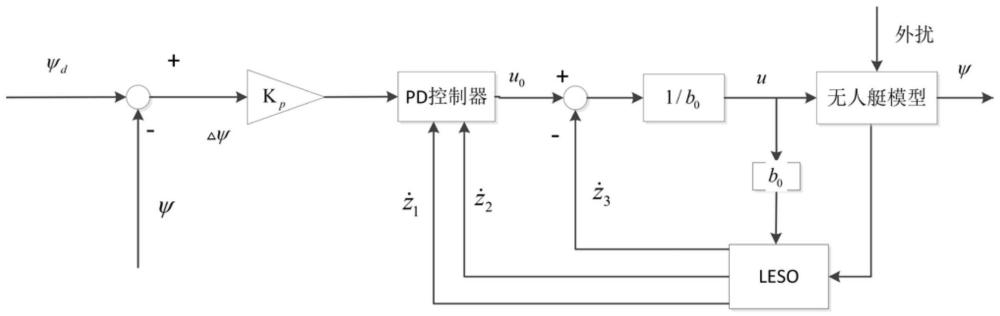
5、作为本发明的进一步优化,在无人艇速度环控制器内部署线性自抗扰算法。
6、作为本发明的进一步优化,还包括一种仿真方法,包括如下步骤:
7、s1:建立无人艇运动坐标系;无人艇位移与欧拉角矩阵为η=[x y z φ θ y]t,无人艇线速度与角速度矩阵表示为其中,φ、θ、y分别表绕x轴旋转的横摇角、绕y轴旋转的纵摇角以及绕以z轴旋转的艏摇角,u、v、w表示无人艇的纵向速度、横向速度和垂向速度,p、q、r表示无人艇的横摇角速度、纵摇角速度、艏摇角速度,x、y、z表示无人艇的纵向、横向、垂向位移;
8、s2:建立无人艇动力参数;无人艇的6自由度运动模型为mvv+c(v)v+d(v)v+g(η)+g0=τ+τwind+τwave,其中,无人艇所受的推力和推力矩为τ=[x y z k m n]t,τwind、τwave分别表示无人艇受到的风压力与力矩、波浪力与力矩,mv为无人艇模型的惯性矩阵,c(v)和d(v)表示科氏力与阻力矩阵,g(η)表示无人艇受到引力和浮力的矢量,g0表示无人艇的恢复力与力矩矢量;
9、s3:建立水面环境干扰模型;包括风力干扰模型:
10、
11、和波浪干扰模型:
12、
13、其中,af、as、ur、cwx、cwy、cwn分别表示纵向受风面积、横向受风面积、风速、纵向风压系数、横向风压系数、艏向风压力矩系数;c、a、l、分别表示波浪角、流速、力臂、纵向波浪力系数、横向波浪力系数、艏向波浪力矩系数;ρa、ρ分别表示空气密度、水密度;xwind、ywind、xwave、ywave、nwave分别表示纵向风力、横向风力、艏向风力力矩;纵向波浪力、横向波浪力、艏向波浪力矩;
14、s4:基于s3建立无人艇运动数学模型:
15、
16、xmodel、ymodel、mmodel分别表示无扰动作用下船舶x轴、y轴合力、z轴合力矩:mx、my分别表示x轴、y轴惯性质量:u、v、r、分别表示纵向速度、横向速度、航向角速度、纵向加速度、横向加速度、航向角加速度:τu、τv、τr分别表示前向推力、侧向推力、艏向扭矩;xu、x|u|u分别表示纵向水动力导数;yv、y|v|v分别表示横向水动力导数;nr、n|r|r分别表示艏向水动力导数;jzz表示船舶z轴转动惯量;
17、s5:基于matlab/simulink无人艇仿真模型;
18、s6:进行无人艇航迹控制仿真。
19、本申请的基于ladrc算法的无人艇航迹跟踪控制方法,提高了无人艇航迹跟踪过程的抗扰性能,提高状态估计的精度,鲁棒性强,能大幅度提高航迹跟踪效果。
技术特征:1.一种基于ladrc算法的无人艇航迹跟踪控制方法,其特征在于,将航迹控制拆解为航向控制和航迹跟踪;
2.根据权利要求1所述的基于ladrc算法的无人艇航迹跟踪控制方法,其特征在于,无人艇航点跟踪涉及直线路径时,期望航向公式满足y(e)=αk+yr(e),式中yr(e)=arctan(-e(t)/△),前向距离△设置为常数。
3.根据权利要求2所述的基于ladrc算法的无人艇航迹跟踪控制方法,其特征在于,设计时变的前向距离,前向距离的值与垂向偏差e(t)和以pt为圆心,以r>0为半径的圆的大小关系相关;当|e(t)|>r时,前向距离△=0;当|e(t)|<r时,e(t)与r之间的关系e(t)2+△(t)2=r2。
4.根据权利要求1所述的基于ladrc算法的无人艇航迹跟踪控制方法,其特征在于,在无人艇速度环控制器内部署线性自抗扰算法。
5.根据权利要求1所述的基于ladrc算法的无人艇航迹跟踪控制方法,其特征在于,还包括一种仿真方法,包括如下步骤:
技术总结本发明属于本发明属于无人艇航迹跟踪技术领域,尤其涉及一种基于LADRC算法的无人艇航迹跟踪控制方法。本发明提供的一种基于LADRC算法的无人艇航迹跟踪控制方法,包括将航迹控制拆解为航向控制和航迹跟踪;航向控制包括采用串级结构的航向控制器,增加航向控制器的外环比例,根据差速电机响应情况,调节外环航向角控制器比例系数;航迹跟踪由船载GPS得到无人艇实际位置,预设无人艇航路点,得到无人艇期望航向角;根据LOS制导律得到垂向偏差;驱动无人艇依据期望航向角和垂向偏差抵达期望航路点并保持在期望航路点。本发明提高了无人艇航迹跟踪过程的抗扰性能,提高状态估计的精度,鲁棒性强,能大幅度提高航迹跟踪效果。技术研发人员:潘炜,汪洋,吴英质,彭利坤,王黎明,吕帮俊,闫晓玲,张鹏受保护的技术使用者:中国人民解放军海军工程大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198139.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表