泳池水位线清洁方法、装置、泳池机器人和可读存储介质与流程
- 国知局
- 2024-07-31 23:50:48
本申请涉及泳池机器人,尤其涉及一种泳池水位线清洁方法、装置、泳池机器人和可读存储介质。
背景技术:
1、利用泳池机器人对泳池墙壁(如整个墙面或水位线区域等)进行自动清洁操作,可以大大节省人力。以水位线清洁为例,目前现有的泳池机器人在清洗泳池水位线时,由于需要切换到不同墙面,即从一面墙去寻找下一面墙,而在这一墙面切换过程中,往往存在找墙困难的问题,还容易出现漏扫现象,导致用户体验不好。
技术实现思路
1、有鉴于此,本申请实施例提供一种泳池水位线清洁方法、装置、泳池机器人和可读存储介质。
2、第一方面,本申请实施例提供一种泳池水位线清洁方法,包括:
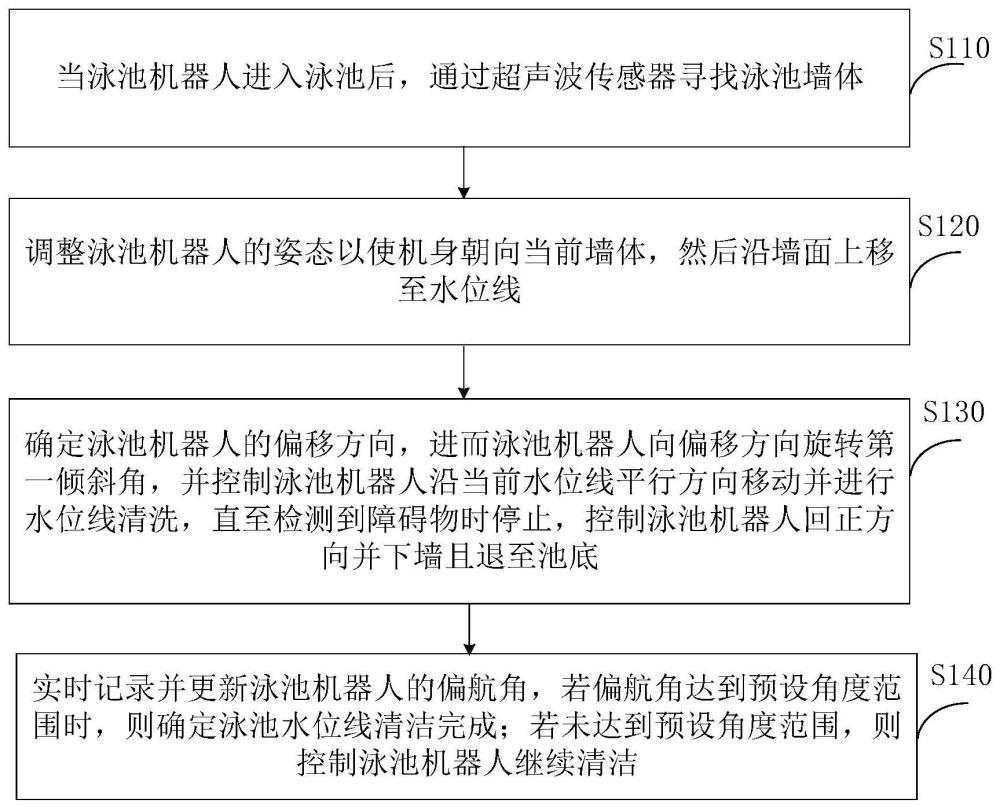
3、当泳池机器人进入泳池后,通过超声波传感器寻找泳池墙体;
4、调整所述泳池机器人的姿态以使机身朝向当前墙体,然后沿墙面上移至水位线;
5、确定所述泳池机器人的偏移方向,进而所述泳池机器人向所述偏移方向旋转第一倾斜角,并控制所述泳池机器人沿当前水位线平行方向移动并进行水位线清洗,直至检测到障碍物时停止,控制所述泳池机器人回正方向并下墙且退至池底;
6、实时记录并更新所述泳池机器人的偏航角,若所述偏航角达到预设角度范围时,则确定泳池水位线清洁完成;若未达到所述预设角度范围,则控制所述泳池机器人继续清洁。
7、在一些实施例中,所述控制所述泳池机器人继续清洁,包括:
8、控制所述泳池机器人向所述水位线平行方向顺时针旋转90度并沿所述水位线平行方向行进第一距离后,继续寻找下一墙体,并在寻找到所述下一墙体时,对所述下一墙体进行所述水位线清洗操作。
9、在一些实施例中,该泳池水位线清洁方法还包括:
10、所述继续寻找下一墙体时,若没有寻找到下一墙体,则控制所述泳池机器人从当前位置向所述水位线垂直方向逆时针旋转90度并行进所述第一距离后,继续寻找下一墙体,并在寻找到下一墙体时,对所述下一墙体进行所述水位线清洗操作。
11、在一些实施例中,该泳池水位线清洁方法还包括:
12、若仍没有寻找到下一墙体,则控制所述泳池机器人从当前位置继续行进到第二距离,然后从当前位置向所述水位线平行方向逆时针旋转90度并行进所述第一距离,寻找下一墙体;若寻找到下一墙体,则对所述下一墙体进行所述水位线清洗操作。
13、在一些实施例中,所述第一距离为0.5m-1m;
14、所述第二距离的取值范围为超过0.5m且不大于10m。
15、在一些实施例中,所述沿墙面上移至水位线,包括:
16、根据所述泳池机器人在爬墙过程中实时记录的俯仰角,实时调节所述泳池机器人的水泵功率至对应爬墙阶段的档位功率;
17、当通过所述超声波传感器检测到所述泳池机器人处于出水状态时,则确定到达泳池水位线位置。
18、在一些实施例中,所述水泵功率的档位至少包括所述预设低档功率和预设标准档功率;所述实时调节所述泳池机器人的水泵功率至对应爬墙阶段的档位功率,包括:
19、当所述俯仰角逐渐增大至45度时,对应调整所述水泵功率先由关闭状态再到所述预设低档功率;
20、当所述俯仰角超过45度后,调整所述水泵功率至所述预设标准档功率。
21、第二方面,本申请实施例提供一种泳池水位线清洁装置,包括:
22、寻墙模块,用于当泳池机器人进入泳池后,通过超声波传感器寻找泳池墙体;
23、爬墙模块,用于调整所述泳池机器人的姿态以使机身朝向当前墙体,然后沿墙面上移至水位线;
24、清洗模块,用于确定所述泳池机器人的偏移方向,进而所述泳池机器人向所述偏移方向旋转第一倾斜角,并控制所述泳池机器人沿当前水位线平行方向移动并进行水位线清洗,直至检测到障碍物时停止,控制所述泳池机器人回正方向并下墙且退至池底;
25、确定模块,用于实时记录并更新所述泳池机器人的偏航角,若所述偏航角达到预设角度范围时,则确定泳池水位线清洁完成;若未达到所述预设角度范围,则控制所述泳池机器人继续清洁。
26、第三方面,本申请实施例提供一种泳池机器人,所述泳池机器人包括处理器和存储器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序以实施所述的泳池水位线清洁方法。
27、第四方面,本申请实施例提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序在处理器上执行时,实施所述的泳池水位线清洁方法。
28、本申请的实施例具有如下有益效果:
29、本申请的泳池水位线清洁方法通过控制泳池机器人在进入泳池后寻找泳池墙体,并调整姿态以使机身朝向当前墙体,然后爬墙且上移至水位线;然后控制泳池机器人沿当前水位线平行方向移动并进行水位线清洗,在清洁完当前水位线后下墙且退至池底;同时,泳池机器人根据实时更新的偏航角来确定泳池水位线清洁的任务是否完成,由此可以实现对泳池墙面的切换及水位线清洁操作,另外,该方法可以解决在切换墙面时寻墙难的问题,另外,在判断清洁任务是否结束时,通过判断偏航角是否达到预设角度范围,以避免出现漏扫的问题,即可提高泳池水位线清洁的覆盖率。
技术特征:1.一种泳池水位线清洁方法,其特征在于,包括:
2.根据权利要求1所述的泳池水位线清洁方法,其特征在于,所述控制所述泳池机器人继续清洁,包括:
3.根据权利要求2所述的泳池水位线清洁方法,其特征在于,所述继续寻找下一墙体时,还包括:
4.根据权利要求3所述的泳池水位线清洁方法,其特征在于,还包括:
5.根据权利要求4所述的泳池水位线清洁方法,其特征在于,所述第一距离为0.5m-1m;
6.根据权利要求1至5中任一项所述的泳池水位线清洁方法,其特征在于,所述沿墙面上移至水位线,包括:
7.根据权利要求6所述的泳池水位线清洁方法,其特征在于,所述水泵功率的档位至少包括预设低档功率和预设标准档功率;所述实时调节所述泳池机器人的水泵功率至对应爬墙阶段的档位功率,包括:
8.一种泳池水位线清洁装置,其特征在于,包括:
9.一种泳池机器人,其特征在于,所述泳池机器人包括处理器和存储器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序以实施权利要求1-7中任一项所述的泳池水位线清洁方法。
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上执行时,实施根据权利要求1-7中任一项所述的泳池水位线清洁方法。
技术总结本申请涉及泳池机器人技术领域,公开了一种泳池水位线清洁方法、装置、泳池机器人和可读存储介质,该方法包括:当泳池机器人进入泳池后,通过超声波传感器寻找泳池墙体;调整泳池机器人的姿态以使机身朝向当前墙体,然后沿墙面上移至水位线;确定泳池机器人的偏移方向,进而泳池机器人向偏移方向旋转第一倾斜角,并控制泳池机器人沿当前水位线平行方向移动并进行水位线清洗,直至检测到障碍物时停止,控制泳池机器人回正方向并下墙且退至池底;实时记录并更新泳池机器人的偏航角,若偏航角达到预设角度范围时,则确定泳池水位线清洁完成;若未达到预设角度范围,则控制泳池机器人继续清洁,以此实现墙面切换清洁及提高水位线清洁覆盖率。技术研发人员:张华,王志,陈鑫受保护的技术使用者:深圳市优纪元科技有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198799.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表