一种基于陀螺仪的电动轮椅动态平衡控制方法与流程
- 国知局
- 2024-07-31 23:56:03
本发明属于智能控制,涉及一种基于陀螺仪的电动轮椅动态平衡控制方法。
背景技术:
1、近年来,随着人类生活水平的不断提高和医疗技术的进步,轮椅设备在提供便利与支持方面发挥着重要作用。并且随着人口老龄化和残障人士数量的增加,人们对轮椅的需求和关注度也在不断增加。
2、然而,传统轮椅虽然能够帮助用户进行基本的移动,但在面临动态平衡和稳定性方面存在一些挑战。在很多情况下,用户在使用传统轮椅时可能会面临倾倒和失衡的风险,特别是在运动、上下坡道或不平地形等情况下。这种不稳定性不仅影响到用户的安全,也会限制他们的日常活动和独立性。因此,研发一种能够改善轮椅设备的动态平衡性和稳定性的技术变得非常重要。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种基于陀螺仪的电动轮椅动态平衡控制方法。
2、本发明的目的可以通过以下技术方案实现:
3、本申请提供了一种基于陀螺仪的电动轮椅动态平衡控制方法,包括以下步骤:
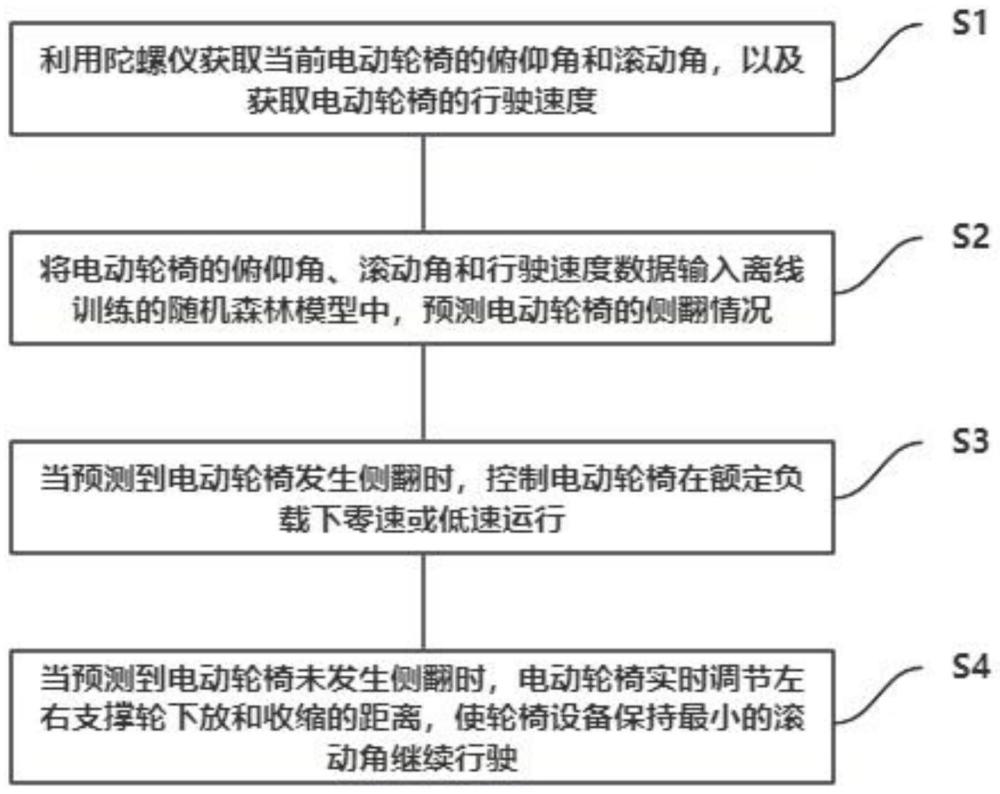
4、s1、利用陀螺仪获取当前电动轮椅的俯仰角和滚动角,以及获取电动轮椅的行驶速度,所述俯仰角获取电动轮椅当前所在的地面坡度,所述地面坡度为地面表面相对于水平面的倾斜角度,所述滚动角为电动轮椅绕其车身纵轴旋转的角度;
5、s2、将电动轮椅的俯仰角、滚动角和行驶速度数据输入离线训练的随机森林模型中,预测电动轮椅的侧翻情况,所述离线训练的随机森林模型,以电动轮椅的俯仰角、滚动角和行驶速度数据作为解释变量,电动轮椅的侧翻情况作为响应变量;
6、s3、当预测到电动轮椅发生侧翻时,控制电动轮椅在额定负载下零速或低速运行;
7、s4、当预测到电动轮椅未发生侧翻时,电动轮椅实时调节左右支撑轮下放和收缩的距离,使轮椅设备保持最小的滚动角继续行驶。
8、进一步地,步骤s2中,所述离线训练的随机森林模型,包括以下构建步骤:
9、s21、数据准备:准备历史时期包含特征和标签的数据集,所述特征为电动轮椅的俯仰角、滚动角和行驶速度数据,所述标签为电动轮椅的侧翻情况;
10、s22、数据处理:根据电动轮椅的侧翻情况,将未发生侧翻的数据标记为“0”,发生侧翻情况的数据标记为“1”;
11、s23、数据集划分:将数据集划分为训练集和测试集,采用数据集中70%的数据样本作为训练集,30%的数据样本作为测试集;
12、s24、随机抽样:从训练集中随机抽取一定数量的数据样本,并有放回地构建多个不同的训练集;
13、s25、构建决策树:对于每个随机抽样的训练集,对特征进行随机选择,以构建决策树模型;
14、s26、集成决策树:将构建好的多个决策树整合成随机森林模型,利用投票机制或平均值做出最终的预测;
15、s27、模型评估:使用评估指标评估随机森林模型对测试集的预测性能。
16、进一步地,步骤s25中,所述决策树模型,配置为cart模型。
17、进一步地,步骤s27中,所述评估指标包括准确率、精确率、召回率或f1值。
18、进一步地,步骤s3中,所述控制电动轮椅在额定负载下零速或低速运行,具体采用线性霍尔传感器检测电动轮椅电机的位置和速度,对电动轮椅进行控制,包括以下步骤:
19、s31、获取线性霍尔传感器三相的实时电压值;
20、s32、根据线性霍尔传感器的特性,获取线性霍尔传感器在每个电周期的电压中值,并计算实时电压值与电压中值之间的三相电压差值;
21、s33、对三相电压差值进行归一化处理;
22、s34、对归一化处理后的三相电压差值进行clark变换,得到α轴和β轴的电压值;
23、s35、通过计算α轴和β轴的电压值的反正切函数值,得到电机转子的位置,即电角度;
24、s36、使用pll根据电角度的变化得到电频率;
25、s37、通过电频率转换得到实际电机转速;
26、s38、根据实际电机转速,通过pid调节器控制电动轮椅在额定负载下零速或低速运行。
27、进一步地,步骤s33中,所述归一化处理,计算公式如下:
28、
29、式中,ɡ(x)为归一化函数;xi为第i个三相电压差值;xmin为三相电压差值的最小值;xmax为三相电压差值的最大值。
30、进一步地,步骤s34中,所述对归一化处理后的三相电压差值进行clark变换,得到α轴和β轴的电压值,计算公式如下:
31、
32、
33、式中,uα和uβ分别表示α轴和β轴的电压值;uu、uv和uw为归一化处理后的三相电压差值。
34、进一步地,步骤s35中,所述通过计算α轴和β轴的电压值的反正切函数值,得到电机转子的位置,计算公式如下:
35、
36、式中,θ表示电机转子的位置;uα和uβ分别表示α轴和β轴的电压值。
37、进一步地,步骤s37中,所述通过电频率转换得到实际电机转速,计算公式如下:
38、v=f*60/n,
39、式中,v表示电机转速;f表示电频率;n表示极对数。
40、本发明的有益效果:
41、通过陀螺仪获取当前电动轮椅的俯仰角和滚动角,以及获取电动轮椅的行驶速度;将电动轮椅的俯仰角、滚动角和行驶速度数据输入离线训练的随机森林模型中,预测电动轮椅的侧翻情况;当预测到电动轮椅发生侧翻时,采用线性霍尔传感器检测电动轮椅电机的位置和速度,控制电动轮椅在额定负载下零速或低速运行;当预测到电动轮椅未发生侧翻时,电动轮椅实时调节左右支撑轮下放和收缩的距离,使轮椅设备保持最小的滚动角继续行驶。本发明通过构建随机森林模型,实时监测电动轮椅发生侧翻的风险,实现电动轮椅的动态平衡控制。
技术特征:1.一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s2中,所述离线训练的随机森林模型,包括以下构建步骤:
3.根据权利要求2所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s25中,所述决策树模型,配置为cart模型。
4.根据权利要求2所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s27中,所述评估指标包括准确率、精确率、召回率或f1值。
5.根据权利要求1所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s3中,所述控制电动轮椅在额定负载下零速或低速运行,具体采用线性霍尔传感器检测电动轮椅电机的位置和速度,对电动轮椅进行控制,包括以下步骤:
6.根据权利要求5所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s33中,所述归一化处理,计算公式如下:
7.根据权利要求5所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s34中,所述对归一化处理后的三相电压差值进行clark变换,得到α轴和β轴的电压值,计算公式如下:
8.根据权利要求5所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s35中,所述通过计算α轴和β轴的电压值的反正切函数值,得到电机转子的位置,计算公式如下:
9.根据权利要求5所述的一种基于陀螺仪的电动轮椅动态平衡控制方法,其特征在于:步骤s37中,所述通过电频率转换得到实际电机转速,计算公式如下:
技术总结本发明涉及一种基于陀螺仪的电动轮椅动态平衡控制方法,属于智能控制技术领域,通过陀螺仪获取当前电动轮椅的俯仰角和滚动角,以及获取电动轮椅的行驶速度;将电动轮椅的俯仰角、滚动角和行驶速度数据输入离线训练的随机森林模型中,预测电动轮椅的侧翻情况;当预测到电动轮椅发生侧翻时,采用线性霍尔传感器检测电动轮椅电机的位置和速度,控制电动轮椅在额定负载下零速或低速运行;当预测到电动轮椅未发生侧翻时,电动轮椅实时调节左右支撑轮下放和收缩的距离,使轮椅设备保持最小的滚动角继续行驶。本发明通过构建随机森林模型,实时监测电动轮椅发生侧翻的风险,实现电动轮椅的动态平衡控制。技术研发人员:包士维,任海军,赵勇,徐明宇,陈志鹏,许锦标,詹振宇受保护的技术使用者:小神童创新科技(广州)有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240730/199244.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表