一种空间飞行器在轨实验样品控制模型验证方法及系统
- 国知局
- 2024-07-31 23:55:57
所属的技术人员知道,本发明可以实现为系统、方法或计算机程序产品,因此,本公开可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是一一但不限于——电、磁、光、电磁、红外线、或半导体的系统、系统或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、系统或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
背景技术:
1、随着我国的载人航天进入空间站时代,关键、精准的控制模型对于飞行器的轨道控制、相关在轨精密、前沿科学实验的开展等具均有十分重要的意义。以空间站某科学实验柜为例,主要工作机理是基于静电悬浮原理,驱动高压放大器输出电压值以形成静电场,实现不同材质实验样品(以下简称:样品)的精准控制,在真空、半真空或者加压条件下对样品进行加热、融化等并进行物性测量等一系列科学实验。由于样品的材质不同,物理特性也不同,在对其进行加热控制的过程中,样品初始的带电量以及所带电荷性质都会随着温度、物理状态的变化而发生突变,这就对样品的控制模型(系统)自身的自适应能力和控制精度提出了更高的要求。因此,一套高精度自适应的样品悬浮位置控制算法模型(以下简称:模型)应运而生。
2、但是,由于当前的地面仿真测试环境并不具备微重力、高真空、强辐射等一系列太空环境要素;而模型控制算法、参数全部依赖于在轨真实太空环境测试验证不仅需要根据之前的验证结果,频繁更改软件模型的算法、参数,频繁的上载程序文件,占用天地通信的带宽,更浪费实验样品,如何验证上述样品悬浮位置精准控制算法的正确性和准确性成了当务之急。
3、传统的空间应用系统软件的配置项级测试验证的一般方法是,根据被测软件的物理接口类型和通信协议,构建半实物仿真测试系统,即地检设备,对被测软件周围交联的物理设备进行仿真,再通过上位机测试监控显示终端实现测试指令序列的建模,再通过半实物仿真测试前端进行测试指令序列的转发和测试反馈结果数据的接收和回传对被测软件进行测试验证。
4、基于以上原理,半实物仿真测试前端系统仅能够对外部交联设备的通信协议、控制实体(如伺服电机、压电陶瓷电容、相机等)进行仿真或者建模,目前阶段该仿真系统尚无法对太空环境,如微重力等条件,进行仿真或者建模;增大静电场的电压值有可能会使实验样品在地面条件下悬浮起来,但会对元器件造成不可逆的损害,甚至烧毁高压放大器;再加上样品在实际悬浮时受到诸多因素的影响,如表1所示。因此对于涉及微重力等实验条件的科学实验载荷而言,传统的半实物仿真测试系统有其自身难以克服的局限性。
5、传统的软仿真技术,一般通过pc机进行,优点是方便快捷,成本较低;缺点一是只能进行功能仿真,涉及到硬件时序时,正确性准确性无法保证;二是更多的仿真条件的设置过于理想化,导致仿真的结果存在一定的偏差。且传统的样品检测技术多依赖于软仿真技术以及现有的模型。但现有模型并没有过多的结合不同的环境或样品的材质情况。由于上述内容,即模型没有结合不同的环境或样品,进而导致对于在轨卫星实验样品的检测存在无法适配多种环境或检测方向单一等问题。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,具体提供了一种空间飞行器在轨实验样品控制模型验证方法及系统,具体如下:
2、1)第一方面,本发明提供一种基于天地协同模型的在轨卫星实验样品控制模型验证方法,具体技术方案如下:
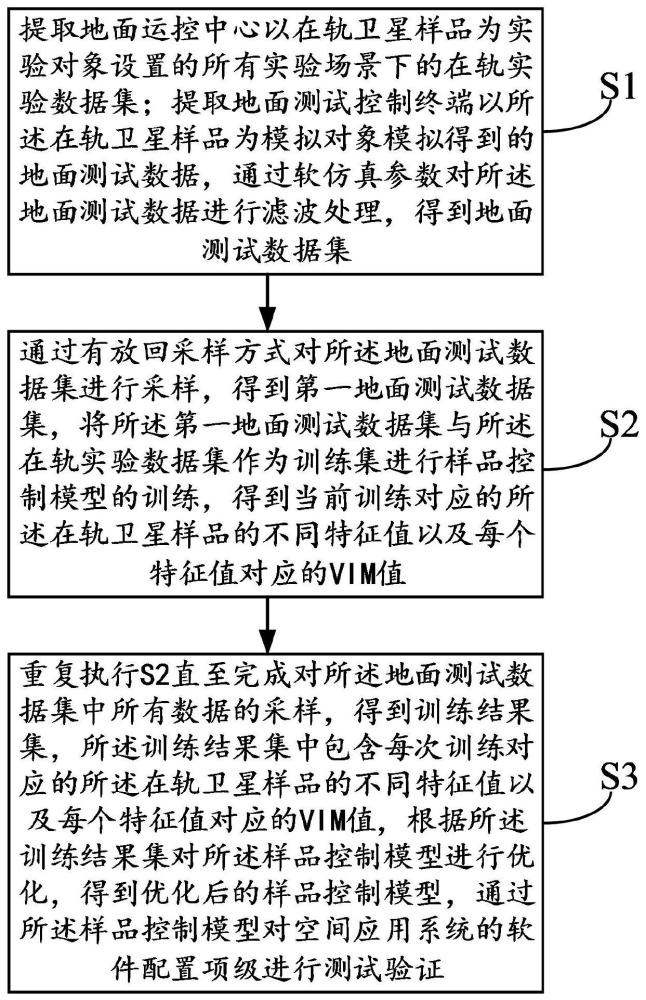
3、s1,提取地面运控中心以在轨卫星样品为实验对象设置的所有实验场景下的在轨实验数据集;提取地面测试控制终端以所述在轨卫星样品为模拟对象模拟得到的地面测试数据,通过软仿真参数对所述地面测试数据进行滤波处理,得到地面测试数据集,所述在轨卫星样品为根据待验证的空间飞行器的基础参数模拟出的样品;
4、s2,通过有放回采样方式对所述地面测试数据集进行采样,得到第一地面测试数据集,将所述第一地面测试数据集与所述在轨实验数据集作为训练集进行样品控制模型的训练,得到当前训练对应的所述在轨卫星样品的不同特征值以及每个特征值对应的vim值;
5、s3,重复执行s2直至完成对所述地面测试数据集中所有数据的采样,得到训练结果集,所述训练结果集中包含每次训练对应的所述在轨卫星样品的不同特征值以及每个特征值对应的vim值,根据所述训练结果集对所述样品控制模型进行优化验证,得到优化验证后的样品控制模型,通过所述样品控制模型对所述在轨卫星样品进行测试验证,并将验证结果作为所述在轨卫星样品对应的空间飞行器的验证结果。
6、本发明提供的一种空间飞行器在轨实验样品控制模型验证方法的有益效果如下:
7、基于对在轨卫星样品进行实验以及模拟等处理,得出在轨实验数据集、地面测试数据以及地面测试数据集等参数,通过上述方案使得对于最终的样品控制模型的初始数据或训练集更具真实性以及针对性,进而使用该模型进行在轨卫星样品的性能检验更全面。通过有放回采样方式提升数据采样的全面性。另外确定每个特征值对应的vim值也可以利于对训练集以及样品控制模型的训练过程的准确性的提升,可以完善对在轨卫星样品的检测过程中的针对性。
8、在上述方案的基础上,本发明还可以做如下改进。
9、进一步,所述在轨实验数据集的确定过程为:
10、在所述地面运控中心,通过样品悬浮控制模型对所述在轨卫星样品进行位控实验,并以样品悬浮控制需求以及加热条件为边界条件进行不同场景的模拟,得到每个场景下的实验结果,将每个场景下的实验结果对应的边界条件进行关联生成有标记的参数集,所述有标记的参数集为所述在轨实验数据集。
11、进一步,所述地面测试数据的确定过程为:
12、根据地面测试控制终端发出的指令,通过至少一个推杆控制所述在轨卫星样品进行移动,以模拟所述在轨卫星样品在飞行器墙体静电场中的运动,采集推杆执行所述指令的过程中,所述在轨卫星样品的实验参数,所述实验参数为所述地面测试数据。
13、进一步,所述地面测试数据集的确定过程为:
14、通过软仿真参数,结合阈值函数对所述地面测试数据进行滤波处理,得到地面测试数据集,所述阈值函数具体为:
15、
16、其中,k为系数,δu1为所述地面测试数据的标准差,δu2为软仿真参数的标准差,δl为所述在轨实验数据集的标准差,l为所述地面测试数据与软仿真参数的个数比,m为系数,w为初始小波系数(小波滤波),n为系数。
17、进一步,将所述第一地面测试数据集与所述在轨实验数据集作为训练集进行样品控制模型的训练的过程为:
18、通过所述训练集,对所述样品控制模型中的分类器进行训练,得到所述训练集的基尼不纯度,根据所述基尼不纯度,结合基尼不纯度与vim对应关系确定每个特征对应的目标vim,对所有目标vim进行排序以及剔除处理,得到在轨卫星样品的不同特征值以及每个特征值对应的vim值。
19、2)第二方面,本发明还提供一种空间飞行器在轨实验样品控制模型验证系统,具体技术方案如下:
20、提取模块用于:提取地面运控中心以在轨卫星样品为实验对象设置的所有实验场景下的在轨实验数据集;提取地面测试控制终端以所述在轨卫星样品为模拟对象模拟得到的地面测试数据,通过软仿真参数对所述地面测试数据进行滤波处理,得到地面测试数据集,所述在轨卫星样品为根据待验证的空间飞行器的基础参数模拟出的样品;
21、训练模块用于:通过有放回采样方式对所述地面测试数据集进行采样,得到第一地面测试数据集,将所述第一地面测试数据集与所述在轨实验数据集作为训练集进行样品控制模型的训练,得到当前训练对应的所述在轨卫星样品的不同特征值以及每个特征值对应的vim值;
22、验证模块用于:重复执行所述训练模块对应的过程直至完成对所述地面测试数据集中所有数据的采样,得到训练结果集,所述训练结果集中包含每次训练对应的所述在轨卫星样品的不同特征值以及每个特征值对应的vim值,根据所述训练结果集对所述样品控制模型进行优化验证,得到优化验证后的样品控制模型,通过所述样品控制模型对所述在轨卫星样品进行测试验证,并将验证结果作为所述在轨卫星样品对应的空间飞行器的验证结果。
23、在上述方案的基础上,本发明还可以做如下改进。
24、进一步,所述在轨实验数据集的确定过程为:
25、在所述地面运控中心,通过样品悬浮控制模型对所述在轨卫星样品进行位控实验,并以样品悬浮控制需求以及加热条件为边界条件进行不同场景的模拟,得到每个场景下的实验结果,将每个场景下的实验结果对应的边界条件进行关联生成有标记的参数集,所述有标记的参数集为所述在轨实验数据集。
26、进一步,所述地面测试数据的确定过程为:
27、根据地面测试控制终端发出的指令,通过至少一个推杆控制所述在轨卫星样品进行移动,以模拟所述在轨卫星样品在飞行器墙体静电场中的运动,采集推杆执行所述指令的过程中,所述在轨卫星样品的实验参数,所述实验参数为所述地面测试数据。
28、进一步,所述地面测试数据集的确定过程为:
29、通过软仿真参数,结合阈值函数对所述地面测试数据进行滤波处理,得到地面测试数据集,所述阈值函数具体为:
30、
31、其中,k为系数,δu1为所述地面测试数据的标准差,δu2为软仿真参数的标准差,δl为所述在轨实验数据集的标准差,l为所述地面测试数据与软仿真参数的个数比,m为系数,w为初始小波系数,n为系数。
32、进一步,将所述第一地面测试数据集与所述在轨实验数据集作为训练集进行样品控制模型的训练的过程为:
33、通过所述训练集,对所述样品控制模型中的分类器进行训练,得到所述训练集的基尼不纯度,根据所述基尼不纯度,结合基尼不纯度与vim对应关系确定每个特征对应的目标vim,对所有目标vim进行排序以及剔除处理,得到在轨卫星样品的不同特征值以及每个特征值对应的vim值。
34、3)第三方面,本发明还提供一种计算机设备,所述计算机设备包括处理器,所述处理器与存储器耦合,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现如上任一项方法。
35、4)第四方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现如上任一项方法。
36、需要说明的是,本发明的第二方面至第四方面的技术方案及对应的可能的实现方式所取得的有益效果,可以参见上述对第一方面及其对应的可能的实现方式的技术效果,此处不再赘述。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199238.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表