基于非线性模型预测的四旋翼无人机路径跟踪控制方法与流程
- 国知局
- 2024-07-31 23:58:03
本发明涉及无人机自动控制,尤其涉及一种基于非线性模型预测的四旋翼无人机路径跟踪控制方法。
背景技术:
1、随着我国电力技术的快速发展,对变电站内的电气设备的及时检查成为了变电站安全可靠运行的重要保障。而四旋翼无人机具备飞行高度较高、视角广阔、有效消除巡检死角等特点,成为了变电站巡检的高效机载设备。而变电站无人机巡检主要在室外进行,由于室外存在阵风等环境干扰、四旋翼无人机的控制输入与状态输出具有约束等特点,导致需要高性能的控制器策略进行四旋翼无人机的控制。
2、针对四旋翼无人机的外部扰动及约束条件,近年来国内外学者研究颇多。zhoulaihong等人在2018年提出了一种基于改进反步法的四旋翼无人机轨迹跟踪控制,通过增加误差积分和饱和函数设计积分饱和反步控制策略,用于抵抗常值干扰和变值干扰;吴跃文等人在2022提出了一种了四旋翼无人机的滑模自抗扰姿态控制器设计,通过内外环控制算法,内环设计自抗扰控制器,外环设计非奇异终端滑模控制器来提高系统响应速度和抗干扰性能;张建中等人在2019年提出了一种基于扩张状态观测器的四旋翼无人机轨迹跟踪控制方法,通过引入线性扩张状态观测器对扰动项进行估计,并结合反步控制器进行补偿,提升了四旋翼无人机的抗干扰能力;以上前三种算法都是针对外部干扰环境的控制算法,针对外部干扰能够很好的抵抗干扰,进行良好的轨迹跟踪控制,但四旋翼无人机是一种非线性模型,且执行器具有多约束的特点,而在实际控制中,需要考虑执行器的多项约束,不存在约束条件下的控制策略具有鲁棒性不足、系统模型不精确的缺陷。
3、王英勋等人在2024年提出了一种多约束条件下四旋翼机动轨迹跟踪一体化控制方法,采用mpc控制方法处理多个约束条件跟踪复杂轨迹,而基于模型预测控制算法(mpc)的四旋翼无人机能够在带约束、外部环境扰动的情况下进行路径跟踪。但是由于四旋翼无人机是一种非线性模型,而mpc是基于线性模型进行控制器设计,因此需要对非线性模型进行线性化,但线性化过程中会产生一定误差,导致控制效果不佳,最终不能很好的跟踪路径。
技术实现思路
1、有鉴于此,本发明提供一种基于非线性模型预测的四旋翼无人机路径跟踪控制方法,能够规避线性化误差,针对非线性模型的四旋翼无人机在带约束的情况下,进行良好的路径跟踪控制。
2、本发明实施例解决其技术问题所采用的技术方案是:
3、一种基于非线性模型预测的四旋翼无人机路径跟踪控制方法,控制对象为x型四旋翼无人机,包括:
4、步骤s1,设定参考路径,所述参考路径为期望状态量集合;
5、步骤s2,建立四旋翼无人机运动数学模型;
6、步骤s3,获取4个螺旋桨电机的转速输入至所述四旋翼无人机运动数学模型中进行下一时刻状态量的预测;
7、步骤s4,根据所述四旋翼无人机当前状态量进行对预测状态量进行反馈补偿,得到校正状态量;
8、步骤s5,获取所述参考路径中下一时刻对应的期望状态量,将所述期望状态量和所述校正状态量代入目标函数,利用所述目标函数求解出所述四旋翼无人机下一时刻的控制量;
9、步骤s6,将所述下一时刻的控制量作用于所述四旋翼无人机。
10、较优地,所述四旋翼无人机运动数学模型的输入为4个螺旋桨电机的转速[ω1,ω2,ω3,ω4],输出为预测状态量xp,x、y、z分别为三个方向速度,θ、ψ分别表示为俯仰角、偏航角、横滚角;所述四旋翼无人机运动数学模型中:
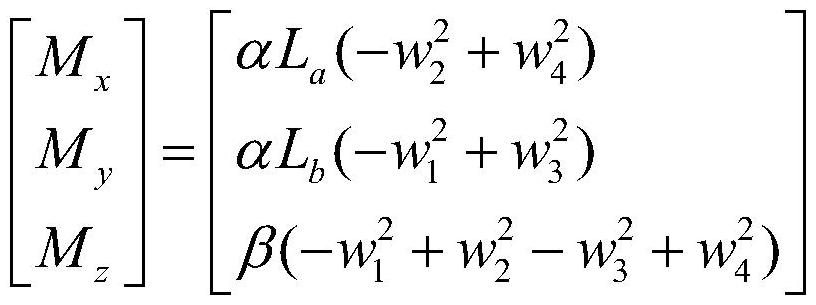
11、在机体坐标系下,四旋翼无人机通过四个螺旋桨高速旋转产生绕机体三轴的转动力矩[mx,my,mz]表示为:
12、
13、无人机运行过程中,沿垂直总拉力为:
14、
15、式中,la=lb=l为机臂长度,α为无人机推力系数,β为旋翼反扭矩系数;
16、四旋翼无人机非线性动力学模型为:
17、
18、式中,m为四旋翼无人机质量;g为重力加速度;ix,iy,iz分别是所述四旋翼无人机的三轴向转动惯量;表示所述四旋翼无人机的位置加速度,表示所述四旋翼无人机的角加速度;通过对和二次积分求得xp。
19、较优地,所述步骤s4包括:
20、步骤s41,获取所述步骤s3对k+1时刻进行预测所得的预测状态量xp(k+1);
21、步骤s42,根据所述四旋翼无人机当前实际状态量y(k)计算误差e(k):
22、e(k)=y(k)-xp(k+1)
23、y(k)=x(k)
24、步骤s43,计算出k+1时刻的校正状态量xb(k+1):
25、xb(k+1)=xp(k+1)+kb·e(k)
26、式中,kb为反馈系数。
27、较优地,所述步骤s5包括:
28、步骤s51,获取所述参考路径中k+1时刻对应的期望状态量xr(k+1);
29、步骤s52,将所述期望状态量和所述校正状态量代入目标函数j,利用所述目标函数求解出最优控制序列{u(k+i)}:其中,离散的四旋翼非线性系统满足:
30、
31、所述目标函数j表示为:
32、
33、式中,q和r分别为状态权重矩阵和输入权重矩阵;u(k+i)为系统k+i时刻的输入;
34、其中,求解过程的约束条件包括:
35、
36、式中,umin为最小输入矩阵,umax为最大输入矩阵;xmin为四旋翼无人机最小状态矩阵,xmax为四旋翼无人机最大状态矩阵;
37、步骤s53,将所述最优控制序列{u(k+i)}中第一个元素u(k+1)作为所述四旋翼无人机下一时刻的控制量。
38、较优地,所述四旋翼无人机的控制量u表示为:
39、
40、由上述技术方案可知,本发明实施例提供的基于非线性模型预测的四旋翼无人机路径跟踪控制方法,首先设定参考路径;建立四旋翼无人机运动数学模型;获取4个螺旋桨电机的转速输入至四旋翼无人机运动数学模型中进行下一时刻状态量的预测;根据四旋翼无人机当前状态量进行对预测状态量进行反馈补偿,得到校正状态量;获取参考路径中下一时刻对应的期望状态量,将期望状态量和校正状态量代入目标函数,利用目标函数求解出四旋翼无人机下一时刻的控制量;将下一时刻的控制量作用于四旋翼无人机。通过本发明的方法,能够规避线性化误差,针对非线性模型的四旋翼无人机在带约束的情况下,进行良好的路径跟踪控制,为四旋翼无人机变电站巡检的稳定性提供保障。
技术特征:1.一种基于非线性模型预测的四旋翼无人机路径跟踪控制方法,控制对象为x型四旋翼无人机,其特征在于,包括:
2.如权利要求1所述的基于非线性模型预测的四旋翼无人机路径跟踪控制方法,其特征在于,所述四旋翼无人机运动数学模型的输入为4个螺旋桨电机的转速[ω1,ω2,ω3,ω4],输出为预测状态量xp,x、y、z分别为三个方向速度,θ、ψ分别表示为俯仰角、偏航角、横滚角;所述四旋翼无人机运动数学模型中:
3.如权利要求2所述的基于非线性模型预测的四旋翼无人机路径跟踪控制方法,其特征在于,所述步骤s4包括:
4.如权利要求3所述的基于非线性模型预测的四旋翼无人机路径跟踪控制方法,其特征在于,所述步骤s5包括:
5.如权利要求4所述的基于非线性模型预测的四旋翼无人机路径跟踪控制方法,其特征在于,所述四旋翼无人机的控制量u表示为:
6.一种基于非线性模型预测的四旋翼无人机路径跟踪控制方法设备,其特征在于,包括:存储器、处理器以及存储在存储器上的用于实现基于非线性模型预测的四旋翼无人机路径跟踪控制方法的程序,所述存储器用于存储实现基于非线性模型预测的四旋翼无人机路径跟踪控制方法的程序;
7.一种可读存储介质,其特征在于,所述可读存储介质上存储有实现基于非线性模型预测的四旋翼无人机路径跟踪控制方法的程序,所述实现图像降分辨率及复原方法的程序被处理器执行以实现如权利要求1至5中任一项所述基于非线性模型预测的四旋翼无人机路径跟踪控制方法的步骤。
技术总结本发明提供一种基于非线性模型预测的四旋翼无人机路径跟踪控制方法,属于无人机自动控制技术领域。包括:设定参考路径,所述参考路径为期望状态量集合;建立四旋翼无人机运动数学模型;获取4个螺旋桨电机的转速输入至所述四旋翼无人机运动数学模型中进行下一时刻状态量的预测;根据所述四旋翼无人机当前状态量进行对预测状态量进行反馈补偿,得到校正状态量;获取所述参考路径中下一时刻对应的期望状态量,将所述期望状态量和所述校正状态量代入目标函数,利用所述目标函数求解出所述四旋翼无人机下一时刻的控制量;将所述下一时刻的控制量作用于所述四旋翼无人机。技术研发人员:翟亮,魏莹,张鹏程,马飞越,张福荣,陈磊,查辉,刘威峰,牛勃,李焕友,黄囤,李树奎,滚晓虎,王艳秋,周建良,倪辉,刘永娟,周秀,吴敏,刘翔,张琴琴,马建鹏,田天,吴志勇,王昕伟受保护的技术使用者:国网宁夏电力有限公司石嘴山供电公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240730/199427.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表