一种考虑机器人冗余特性的全局路径光顺方法及系统
- 国知局
- 2024-08-01 00:02:06
本发明属于机器人路径光顺相关,更具体地,涉及一种考虑机器人冗余特性的全局路径光顺方法及系统。
背景技术:
1、随着科学技术发展日新月异,机器人技术也不断进步,相比五轴数控机床,机器人由于其灵活性高、成本低等优势逐渐应用于加工领域。6关节机器人具有6个自由度,在执行五轴加工任务时,具有一个冗余自由度,该冗余自由度不影响机器人末端实际加工姿态,但会对机器人在进行加工时的关节配置产生影响。而现有冗余角优化方法大多是在加工路径点生成层面,且大多是对离散冗余角进行诸如提升刚度、避免奇异性等优化,对于插补指令上并没有做深入的研究,而机器人插补指令时机器人在执行加工时的直接指令。因此研究机器人在执行五轴加工任务的全局冗余角光顺对提升机器人运动特性具有重要意义。
2、但,现有考虑机器人冗余特性的机器人姿态优化方法,大多是针对机器人路径规划层面,对机器人的离散冗余角进行优化,未考虑机器人在进行指令插补层级的全局冗余角优化。由于机器人的路径光顺包括机器人刀尖位置点光顺、刀具方向光顺以及冗余角光顺,其需要通过严格的理论指导、计算难度大、计算复杂度高。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种考虑机器人冗余特性的全局路径光顺方法及系统,其目的在于提供机器人位置点、方向角以及冗余角的全局优化,解决了机器人在执行五轴加工任务时的动态特性差,加工效率低,关节振动大的技术问题。
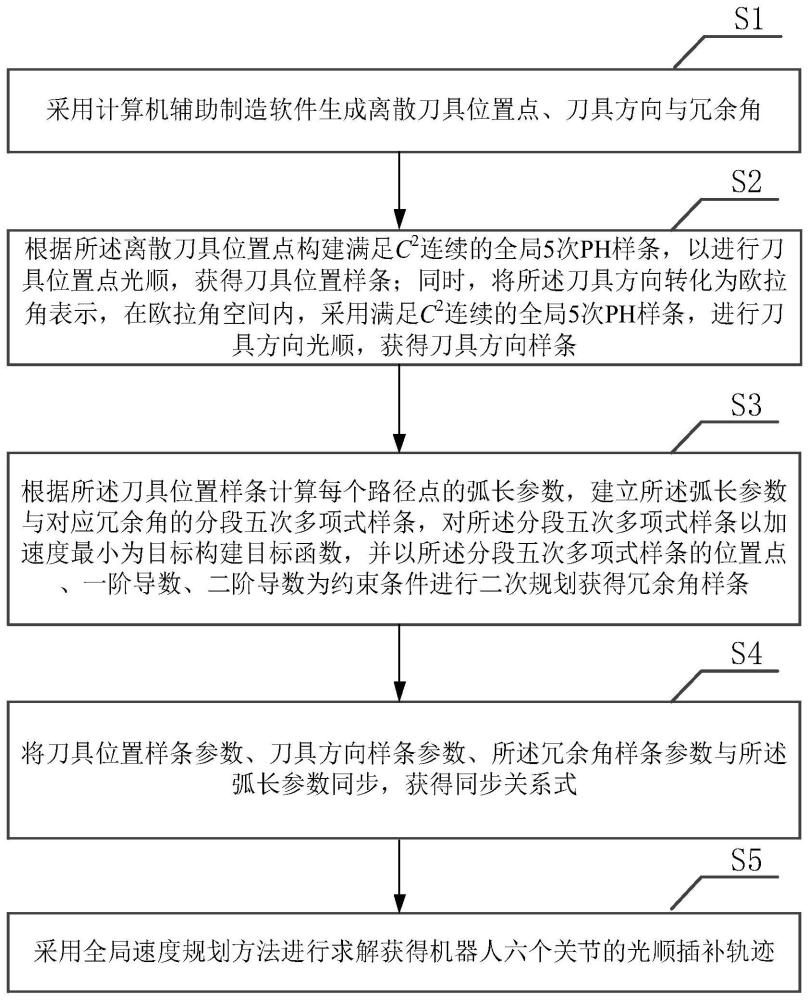
2、为实现上述目的,按照本发明的一个方面,提供了一种考虑机器人冗余特性的全局路径光顺方法,方法包括:s1:采用计算机辅助制造软件生成离散刀具位置点、刀具方向与冗余角;s2:根据所述离散刀具位置点构建满足c2连续的全局5次ph样条,以进行刀具位置点光顺,获得刀具位置样条;同时,将所述刀具方向转化为欧拉角表示,在欧拉角空间内,采用满足c2连续的全局5次ph样条,进行刀具方向光顺,获得刀具方向样条;s3:根据所述刀具位置样条计算每个路径点的弧长参数,建立所述弧长参数与对应冗余角的分段五次多项式样条,对所述分段五次多项式样条以加速度最小为目标构建目标函数,并以所述分段五次多项式样条的位置点、一阶导数、二阶导数为约束条件进行二次规划获得冗余角样条,其中所述分段五次多项式样条为:
3、
4、其中,s为第q个路径点对应的弧长参数,γq为第q个路径点对应的冗余角,cq,j为五次多项式样条系数;s4:将刀具位置样条参数、刀具方向样条参数、所述冗余角样条参数与所述弧长参数同步,获得同步关系式;s5:采用全局速度规划方法进行求解获得机器人六个关节的光顺插补轨迹。
5、优选地,步骤s2根据所述离散刀具位置点构建满足c2连续的全局5次ph样条具体为:
6、根据初始离散刀具位置点pi=[pi,x,pi,y,pi,z]ti=0,1,2…n构建第i段5次ph样条曲线:
7、
8、其中,u为刀具位置样条参数,bi,j为样条控制点,为5次ph样条的基函数。
9、优选地,步骤s2在欧拉角空间内,采用满足c2连续的全局5次ph样条,进行刀具方向光顺,获得刀具方向样条具体为:
10、将刀具方向oi=[oi,x,oi,y,oi,z]ti=0,1,2…n转化为欧拉角表示θi=[αi,βi]ti=0,1,2…n,构建第i段5次ph样条曲线θi(ω);
11、
12、其中,ω为刀具方向样条参数,{mi,j}为样条控制点,为5次ph样条的基函数。
13、优选地,所述目标函数f为:
14、
15、其中,其中,n为路径点的数量,γ为冗余角,si为每段路径的弧长长度。
16、优选地,所述同步关系式为(u(s),ω(s),γ(s))。
17、优选地,步骤s5具体包括:采用全局速度规划方法获得满足位置、方向和加速度约束的最优机器人插补轨迹,将所述最优机器人插补轨迹带入机器人运动学反解函数进行反解,获得机器人六个关节的光顺插补轨迹。
18、优选地,所述最优机器人插补轨迹表达式为:
19、
20、
21、其中,θmin为各关节运动范围最大值,θmax为各关节运动范围最小值,vmax为机器人关节的速度最大值,amax为机器人关节加速度最大值,jmax为机器人关节加加速度最大值。
22、θ(t)=ik([p(s(t)),θ(s(t)),γ(s(t))])
23、其中,ik(·)为机器人运动学反解函数,θ(t)为t时刻的各关节值,[p(s(t)),θ(s(t)),γ(s(t))]为最优机器人插补轨迹。
24、按照本发明的另一方面,提供了一种考虑机器人冗余特性的全局路径光顺系统,包括:参数生成模块:用于采用计算机辅助制造软件生成离散刀具位置点、刀具方向与冗余角;第一获取模块:用于根据所述离散刀具位置点构建满足c2连续的全局5次ph样条,以进行刀具位置点光顺,获得刀具位置样条;同时,将所述刀具方向转化为欧拉角表示,在欧拉角空间内,采用满足c2连续的全局5次ph样条,进行刀具方向光顺,获得刀具方向样条;第二获取模块:用于根据所述刀具位置样条计算每个路径点的弧长参数,建立所述弧长参数与对应冗余角的分段五次多项式样条,对所述分段五次多项式样条以加速度最小为目标构建目标函数,并以所述分段五次多项式样条的位置点、一阶导数、二阶导数为约束条件进行二次规划获得冗余角样条,其中所述分段五次多项式样条为:
25、
26、其中,s为第g个路径点对应的弧长参数,γq为第g个路径点对应的冗余角,cq,j为五次多项式样条系数;
27、第三获取模块:用于将刀具位置样条参数、刀具方向样条参数、所述冗余角样条参数与所述弧长参数同步,获得同步关系式;求解模块:用于采用全局速度规划方法进行求解获得机器人六个关节的光顺插补轨迹。
28、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的一种考虑机器人冗余特性的全局路径光顺方法及系统主要具有以下有益效果:
29、1.本申请通过构建满足c2连续的全局5次ph样条以及冗余角的分段五次多项式样条,构建了刀具位置样条、刀具方向样条以及冗余角样条的全局优化方式,实现了刀具路径的全局优化,充分发挥机器人在执行五轴加工任务时的动态特性,提高加工效率,降低机器人关节振动。
30、2.通过构建弧长参数与对应冗余角的分段五次多样式样条,对分段五次多项式样条以加速度最小为目标构建目标函数,并以分段五次多项式样条的位置点、一阶导数、二阶导数为约束条件进行二次规划获得冗余角样条,可实现对机器人执行冗余加工任务时的姿态规划,提高机器人加工效率。
技术特征:1.一种考虑机器人冗余特性的全局路径光顺方法,其特征在于,包括:
2.根据权利要求1所述的全局路径光顺方法,其特征在于,步骤s2根据所述离散刀具位置点构建满足c2连续的全局5次ph样条具体为:
3.根据权利要求1或2所述的全局路径光顺方法,其特征在于,步骤s2在欧拉角空间内,采用满足c2连续的全局5次ph样条,进行刀具方向光顺,获得刀具方向样条具体为:
4.根据权利要求1所述的全局路径光顺方法,其特征在于,所述目标函数f为:
5.根据权利要求1所述的全局路径光顺方法,其特征在于,所述同步关系式为(u(s),ω(s),γ(s))。
6.根据权利要求1所述的全局路径光顺方法,其特征在于,步骤s5具体包括:
7.根据权利要求6所述的全局路径光顺方法,其特征在于,所述最优机器人插补轨迹表达式为:
8.根据权利要求6或7所述的全局路径光顺方法,其特征在于,所述运动学反解函数为:
9.一种考虑机器人冗余特性的全局路径光顺系统,其特征在于,包括:
技术总结本发明属于机器人路径光顺相关技术领域,其公开了一种考虑机器人冗余特性的全局路径光顺方法及系统,方法包括生成离散刀具位置点、刀具方向与冗余角;根据离散刀具位置点构建满足C<supgt;2</supgt;连续的全局5次PH样条,获得刀具位置样条;将刀具方向转化为欧拉角表示,采用满足C<supgt;2</supgt;连续的全局5次PH样条,获得刀具方向样条;根据刀具位置样条计算每个路径点的弧长参数,建立弧长参数与对应冗余角的分段五次多项式样条,构建目标函数和约束条件进行二次规划获得冗余角样条,其中分段五次多项式样条为将刀具位置样条参数、刀具方向样条参数、冗余角样条参数与弧长参数同步,获得同步关系式;采用全局速度规划方法进行求解获得机器人六个关节的光顺插补轨迹。技术研发人员:杨吉祥,漆琪,阿布力克木·阿地力,丁汉受保护的技术使用者:华中科技大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240730/199474.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表