一种基于视觉信息的无人艇领航跟随安全编队方法
- 国知局
- 2024-08-01 00:05:46
本发明属于无人艇编队控制领域,特别是一种基于视觉信息的无人艇领航跟随安全编队方法。
背景技术:
1、海洋覆盖了地球总面积的三分之二,蕴藏着丰富的自然资源,包括矿产、油气和生物资源等,海洋的开发与保护问题是人类长期面临的课题。无人艇作为一种海上航行器,因其具有体型小,灵活性高,成本低,自主性强等优点,被广泛应用于海洋领域的探索。近年来无人艇编队控制问题受到国内外相关学者的广泛关注,编队相对于单艇来说可以适应更加多样的作业环境。为了应对海洋环境下的无人艇编队任务,近年来大量无人艇编队控制方法被提出,其中包括领航-跟随法、虚拟结构法、基于行为法以及图论法等。值得注意的是,上述算法的实现均依赖于无人艇绝对位置信息或与邻居无人艇之间的相互通信,难以适应复杂海洋环境下定位信号丢失或无人艇通讯中断情况。
2、随着传感器技术的发展,声纳、激光测距仪、激光雷达、视觉摄像头等传感器均能够为本艇提供丰富的传感信息。与其他传感器相比,视觉摄像头可以以更低的成本提供更丰富的信息,研究基于局部视觉感知信息的无人艇编队控制方法在全局绝对位置丢失和通讯受限海洋环境下具有自主能力高、抗毁能力强等显著优势。
3、综上,现有无人艇编队控制方法存在如下不足:
4、第一,现有无人艇集群编队控制方法大多依赖于无人艇集群之间的信息通信。然而,在通信信号弱或无法通信的作业场景下,无法有效实现无人艇集群编队控制任务。
5、第二,现有无人艇编队方法大多基于无人艇集群内部邻居的绝对位置信息,当处于定位服务拒止区域时,现有的无人艇集群编队控制方法将无法维持编队队形。
6、第三,现有的无人艇集群避碰避障方法大多要求群体内的每艘无人艇都同时备独立完善的避碰避障能力,增加了无人艇集群避碰避障方法的设计复杂性。
技术实现思路
1、为了解决上述问题,本发明采用的技术方案是:一种基于视觉信息的无人艇领航跟随安全编队方法,包括以下步骤:
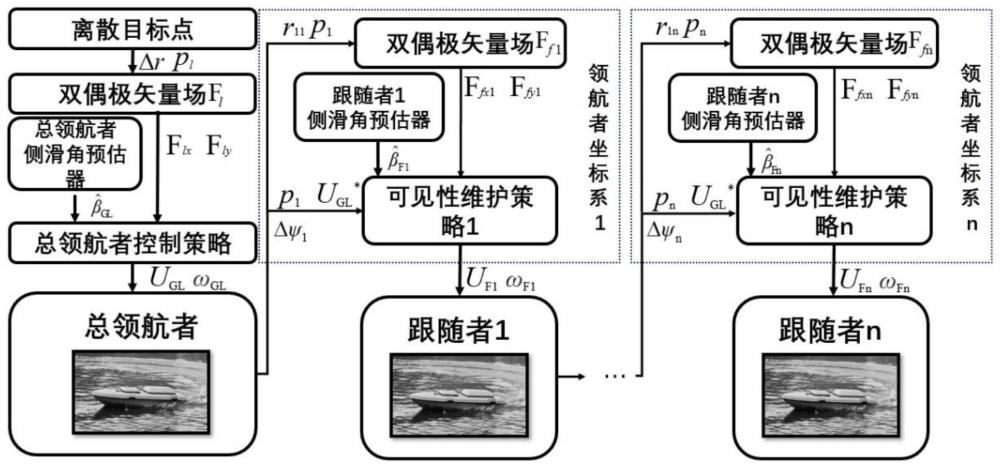
2、获取第n个跟随无人艇与n-1个跟随无人艇的航迹角差值与相对距离,其中n=2...n,获取总领航者与给定的期望离散目标点之间的相对距离;
3、基于第n个跟随无人艇与n-1个跟随无人艇的单位向量p与相对距离,设计n个跟随无人艇双偶极向量场,使跟随者无人艇收敛到相对应领航者的期望位置;基于总领航者与给定的期望离散目标点之间的单位向量pl与相对距离,设计总领航者双偶极向量场,领航者收敛到每个离散目标点;
4、基于跟随者无人艇的实际航迹角和艏摇角速度,设计n个跟随无人艇侧滑角预估器,得到n个跟随无人艇侧滑角,基于总领航者的实际航迹角和艏摇角速度,设计总领航者侧滑角预估器,得到总领航者侧滑角;
5、基于n个跟随无人艇与领航无人艇的距离差以及n个跟随无人艇摄像头正前方与领航者无人艇船头正前方的角度差,设计跟随无人艇的可见性维护策略;
6、基于期望目标点以及期望朝向,设计总领航者的控制策略;
7、基于跟随者的跟随无人艇的可见性维护策略、总领航者的控制策略,实现总领航者与n个跟随无人艇保持编队保持类似牵引挂车队形编队,安全从起始点运行到终点。
8、进一步地:所述总领航者双偶极向量场和跟随无人艇双偶极向量场分别如下:
9、基于输入是全局坐标系下总领航者相对于离散目标点的距离δr与单位向量pl,输出是矢量场在x轴方向和y轴方向产生的力flx与fly,总领航者双偶极矢量场设计如下:
10、flx=2plx(xg-xl)2-plx(yg-yl)2+3ply(xg-xl)(yg-yl) (6)
11、fly=2ply(yg-yl)2-ply(xg-xl)2+3plx(xg-xl)(yg-yl) (7)
12、为单位向量,其中rg=[xg,yg]t为在全局坐标系下离散目标点的位置向量,xg为离散目标点的横坐标,yg为离散目标点的纵坐标,离散目标点与总领航者之间的相对距离为δr=rg-rl=[xg-xl,yg-yl]t,其中xg-xl为在全局坐标系下目标点与领航者的横坐标差值,yg-yl为在全局坐标系下目标点与领航者的纵坐标差值;
13、基于输入是领航者坐标系下跟随者相对于期望位置的距离r1与单位向量p,输出是矢量场在x轴方向和y轴方向产生的力ffx与ffy,所述跟随无人艇双偶极矢量场设计如下:
14、
15、
16、为单位向量,其中rd=[xd,yd]t为跟随者的期望位置向量,xd和yd分别为期望位置的横坐标与纵坐标,rd处于领航者中心与跟随者中心的连线上,与领航者保持固定距离,向量r1=r-rd=[x1,y1]t,x1与y1分别表示r1的横坐标与纵坐标。
17、进一步地:所述总领航者侧滑角预估器和跟随无人艇侧滑角预估器分别如下:
18、基于输入为总领航者的实际航迹角ψgl与总领航者艏摇角速度为ωgl,输出是总领航者侧滑角速度的估计值所述的侧滑角预估器设计如下:
19、
20、其中kg1,kg2>0,且分别为总领航者侧滑角预估器的常值系数,为总领航者侧滑角速度的估计值,为总领航者的实际航迹角的估计值,为总领航者的实际航迹角速度的估计值。
21、基于输入为跟随者的实际航迹角ψf与跟随者艏摇角速度为ωf,输出是跟随者侧滑角速度的估计值所述侧滑角预估器设计如下:
22、
23、其中kf1,kf2>0,且分别为跟随者侧滑角预估器的常值系数,为跟随者侧滑角速度的估计值,为跟随者的实际航迹角的估计值,为跟随者的实际航迹角速度的估计值。
24、进一步地:所述可见性维护策略的可见性约束为:
25、
26、其中:φ为领航者与跟随者中心连线与跟随者朝向的夹角,2α为摄像头的最大视线角,2α<π,ls为视锥的最远探测距离。
27、进一步地:所述跟随者可见性维护策略设计如下:
28、基于输入为矢量场产生的力ffx与ffy,领航者的实际最大合速度领航者坐标系下的单位向量p,跟随者侧滑角速度估计值和跟随者与领航者航迹角差值δψ,输出为跟随者的实际合速度uf与艏摇角速度ωf,所述跟随者可见性维护策略设计如下:
29、
30、
31、其中:k1,k2>0且分别为跟随者和速度和艏摇角速度的常值系数,表示跟随者的侧滑角速度估计值,为跟随者的期望朝向。
32、进一步地:所述总领航者控制策略设计如下:
33、基于输入为矢量场产生的力flx,fly和总领航者侧滑角速度估计值输出为总领航者的实际合速度ugl和艏摇角速度ωgl,所述总领航者控制策略设计如下:
34、
35、
36、其中,kgl>0,为总领航者艏摇角速度的常值系数,ψgl为总领航者的航迹角,为总领航者的侧滑角速度估计值,为总领航者的期望朝向,为领航者的实际最大合速度。
37、一种基于视觉信息的无人艇领航跟随安全编队装置,包括:
38、获取模块:用于获取第n个跟随无人艇与n-1个跟随无人艇的航迹角差值与相对距离,其中n=2...n;获取总领航者与给定的期望离散目标点之间的相对距离;
39、双偶极向量场设计模块:基于第n个跟随无人艇与n-1个跟随无人艇的单位向量与相对距离,设计n个跟随无人艇双偶极向量场,使跟随者无人艇收敛到相对应领航者的期望位置;基于总领航者与给定的期望离散目标点之间的单位向量与相对距离,设计总领航者双偶极向量场,领航者收敛到每个离散目标点;
40、侧滑角预估器设计模块:基于跟随者无人艇的实际航迹角和艏摇角速度,设计n个跟随无人艇侧滑角预估器,得到n个跟随无人艇侧滑角,基于总领航者的实际航迹角和艏摇角速度,设计总领航者侧滑角预估器,得到总领航者侧滑角;
41、可见性维护策略设计模块:用于基于n个跟随无人艇与领航无人艇的距离差以及n个跟随无人艇摄像头正前方与领航者无人艇船头正前方的角度差,设计跟随无人艇的可见性维护策略;
42、总领航者的控制策略设计模块:用于基于期望目标点以及期望朝向,设计总领航者的控制策略;
43、实现模块:用于基于跟随者的跟随无人艇的可见性维护策略、总领航者的控制策略,实现总领航者与n个跟随无人艇保持类似牵引挂车队形编队,安全从起始点运行到终点。
44、本发明提供的一种基于视觉信息的无人艇领航跟随安全编队方法,具有以下优点:
45、与现有技术相比,本发明具有以下有益效果:
46、第一,与现有的无人艇集群编队控制方法相比,本发明所设计的基于视觉信息的无人艇领航跟随安全编队方法将视觉传感器测量的本艇与领航无人艇的航迹角差值与相对距离作为信息输入,不需无人艇之间通信交换信息。在通信信号弱或无法通信的作业场景下依然适用,简化了控制方法,提高了实时性和可用性。
47、第二,与现有无人艇编队方法相比,本发明所设计的算法依靠无人艇之间通过视觉传感器捕捉的相对位置信息来维持编队队形,降低了无人艇对全局定位信息精度的依赖,当处于定位服务拒止区域时,依然可以有效保持编队队形。
48、第三,与现有的无人艇集群避碰避障方法相比,本方法将编队当作一个牵引挂车系统,无需每个成员都具备独立完善的避碰避障能力,而是总领航者独自负责团队与外界的避碰避障,简化了算法的复杂性,大大提高了编队容纳能力。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199640.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表