一种智能张拉机器人的张拉控制方法及系统与流程
- 国知局
- 2024-08-01 00:11:51
本发明涉及机器人控制,尤其涉及一种智能张拉机器人的张拉控制方法及系统。
背景技术:
1、机器人控制技术领域是一个集成了先进的控制理论、人工智能、传感器技术及机械工程的综合技术领域,在机器人控制技术领域内,研究和开发重点放在如何提高机器人的自主性、灵活性以及执行任务的准确性上。包括对机器人的运动控制、路径规划、环境感知与交互、任务执行策略的优化,技术发展的目标是使机器人能够在复杂多变的环境中,更加智能、高效地完成目标任务,尤其是在人类难以直接介入或存在安全风险的情况下。
2、其中,智能张拉机器人的张拉控制方法是一种专为提升张拉任务效率和准确性而设计的控制策略,旨在通过智能化手段优化机器人执行张拉作业的性能。这种控制方法的目的是确保在建筑施工、桥梁维修或需要张拉操作的场景中,机器人能够自主完成张拉任务,减少人工干预,提高作业的安全性和效率。达成的效果包括提高张拉作业的精确度、缩短作业时间、降低劳动成本以及提升作业环境的安全性。这对于要求高精度和高安全标准的工程尤为重要,例如大跨度桥梁的建设和高速铁路的维护。
3、传统方法在环境感知、特征提取、路径规划和稳定性分析方面存在明显不足。传统环境拓扑结构方法忽略了环境的复杂几何和物理约束,导致环境信息的表示不够准确,影响了后续路径规划的有效性。在路径规划方面,缺乏动态关注机制,使得路径选择不够灵活,难以在效率、安全性和可行性之间取得最优平衡。在稳定性分析和控制决策方面,传统方法没有充分参照动态系统的复杂性,缺乏有效的分岔控制和决策优化机制,导致系统的适应性和鲁棒性不足。不足限制了机器人在复杂环境下的操作性能,增加了任务执行的难度和风险,传统方法在实际应用中面临着效率低下、安全性差和适应性不足等问题,问题直接影响了机器人系统的整体性能和应用价值。
技术实现思路
1、本发明的目的是解决现有技术中存在的缺点,而提出的一种智能张拉机器人的张拉控制方法及系统。
2、为了实现上述目的,本发明采用了如下技术方案:一种智能张拉机器人的张拉控制方法,包括以下步骤:
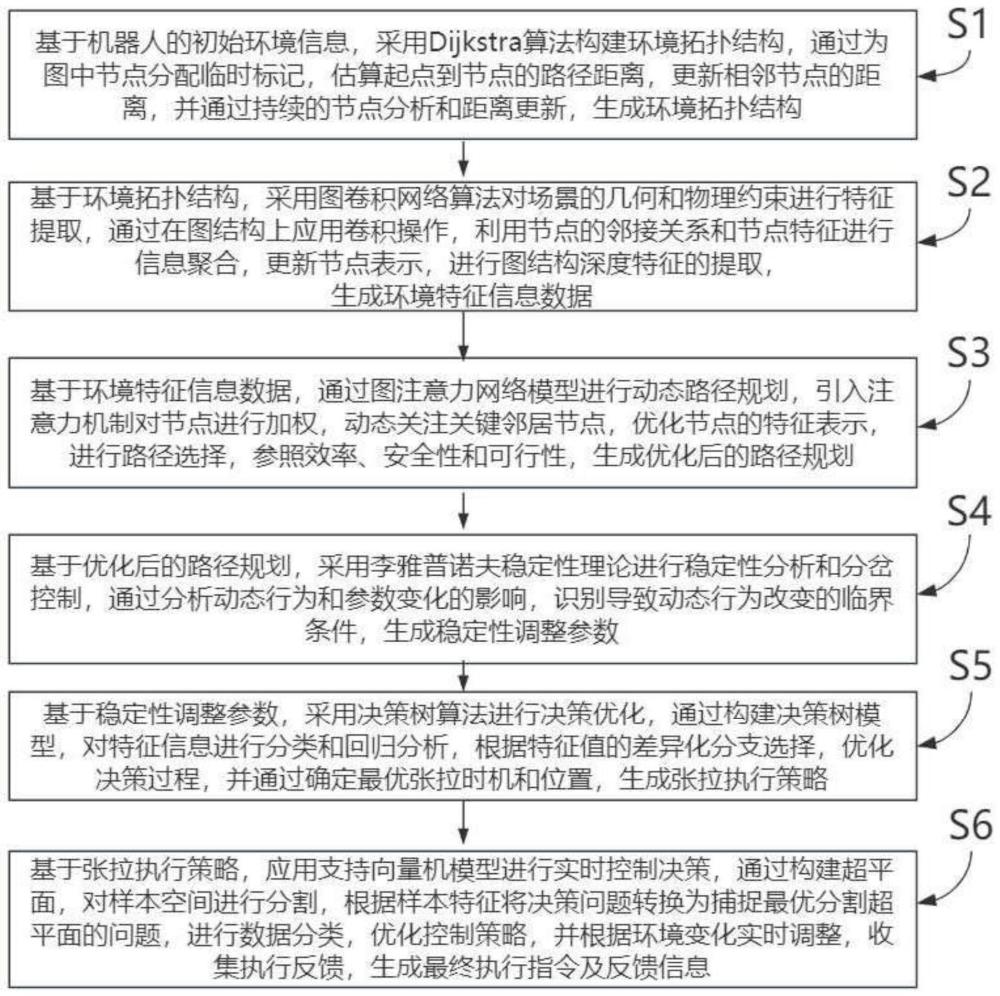
3、s1:基于机器人的初始环境信息,采用dijkstra算法构建环境拓扑结构,通过为图中节点分配临时标记,估算起点到节点的路径距离,更新相邻节点的距离,并通过持续的节点分析和距离更新,生成环境拓扑结构;
4、s2:基于所述环境拓扑结构,采用图卷积网络算法对场景的几何和物理约束进行特征提取,通过在图结构上应用卷积操作,利用节点的邻接关系和节点特征进行信息聚合,更新节点表示,进行图结构深度特征的提取,生成环境特征信息数据;
5、s3:基于所述环境特征信息数据,通过图注意力网络模型进行动态路径规划,引入注意力机制对节点进行加权,动态关注关键邻居节点,优化节点的特征表示,进行路径选择,参照效率、安全性和可行性,生成优化后的路径规划;
6、s4:基于所述优化后的路径规划,采用李雅普诺夫稳定性理论进行稳定性分析和分岔控制,通过分析动态行为和参数变化的影响,识别导致动态行为改变的临界条件,生成稳定性调整参数;
7、s5:基于所述稳定性调整参数,采用决策树算法进行决策优化,通过构建决策树模型,对特征信息进行分类和回归分析,根据特征值的差异化分支选择,优化决策过程,并通过确定最优张拉时机和位置,生成张拉执行策略;
8、s6:基于所述张拉执行策略,应用支持向量机模型进行实时控制决策,通过构建超平面,对样本空间进行分割,根据样本特征将决策问题转换为捕捉最优分割超平面的问题,进行数据分类,优化控制策略,并根据环境变化实时调整,收集执行反馈,生成最终执行指令及反馈信息。
9、作为本发明的进一步方案,所述环境拓扑结构具体指节点和边的集合,所述环境特征信息数据包括空间布局、物体大小和对应位置特征,所述优化后的路径规划包括选择的路径点序列、估计的行进时间和路径的安全性评估,所述稳定性调整参数具体为调整阈值、临界分岔点和响应时间,所述张拉执行策略包括张拉力度、张拉位置和执行时机的参数集,所述最终执行指令及反馈信息具体指控制命令的内容、执行状态的实时更新和环境变化对控制策略调整的指导意见。
10、作为本发明的进一步方案,基于机器人的初始环境信息,采用dijkstra算法构建环境拓扑结构,通过为图中节点分配临时标记,估算起点到节点的路径距离,更新相邻节点的距离,并通过持续的节点分析和距离更新,生成环境拓扑结构的步骤具体为;
11、s101:基于机器人的初始环境信息,采用迪杰斯特拉算法,进行环境的图表示构建,通过从起点将节点加入已处理集合,计算起点到节点的最短路径,更新节点间的最短路径,生成初步环境图;
12、s102:基于所述初步环境图,采用优先队列优化的迪杰斯特拉算法,进行路径距离的细化估算,利用优先队列按照节点最短路径估算值的优先级排序,更新相邻节点的距离信息,生成更新后环境图;
13、s103:基于所述更新后环境图,进行节点最短路径距离的计算,通过图表示反应环境结构,并进行特征提取和路径规划,生成环境拓扑结构。
14、作为本发明的进一步方案,基于所述环境拓扑结构,采用图卷积网络算法对场景的几何和物理约束进行特征提取,通过在图结构上应用卷积操作,利用节点的邻接关系和节点特征进行信息聚合,更新节点表示,进行图结构深度特征的提取,生成环境特征信息数据的步骤具体为;
15、s201:基于所述环境拓扑结构,采用图卷积网络算法,进行环境的几何和物理约束的特征提取,通过在图的节点上应用卷积操作,聚合邻接节点的信息,更新节点表示,生成环境特征基础集;
16、s202:基于所述环境特征基础集,采用深层图卷积网络,进行特征提取的强化,通过增加网络层次深度,并进行层次的特征提取和信息聚合,生成环境特征增强集;
17、s203:基于所述环境特征增强集,采用特征选择算法进行特征优化,通过评估并挑选描述环境约束的特征,并对特征反映环境的物理和几何限制,生成环境特征信息数据。
18、作为本发明的进一步方案,基于所述环境特征信息数据,通过图注意力网络模型进行动态路径规划,引入注意力机制对节点进行加权,动态关注关键邻居节点,优化节点的特征表示,进行路径选择,参照效率、安全性和可行性,生成优化后的路径规划的步骤具体为;
19、s301:基于所述环境特征信息数据,采用图注意力网络模型,进行初步路径规划,通过计算节点间的注意力系数,动态调整节点间信息的流动,引入注意力机制对节点加权,生成初步路径评估数据;
20、s302:基于所述初步路径评估数据,采用改进的图注意力网络模型,进行路径规划的细化,通过引入注意力机制和强化网络深度,提升路径选择的准确性和效率,生成细化路径选择数据;
21、s303:基于所述细化路径选择数据,采用启发式搜索算法,进行路径效率分析,通过评估路径的通行时间和障碍物避让情况,对路径安全性进行量化评估,参照机器人的动态导航能力,对候选路径进行审查,通过迭代优化过程,生成优化后的路径规划。
22、作为本发明的进一步方案,基于所述优化后的路径规划,采用李雅普诺夫稳定性理论进行稳定性分析和分岔控制,通过分析动态行为和参数变化的影响,识别导致动态行为改变的临界条件,生成稳定性调整参数的步骤具体为;
23、s401:基于所述优化后的路径规划,采用李雅普诺夫稳定性理论,进行动态模型构建,通过建立数学模型分析状态变量随时间变化的稳定性,判断机器人控制在差异化初始条件和参数下的稳定性,通过边界条件的设定,识别机器人控制稳定性变化的临界点,生成稳定性边界条件分析结果;
24、s402:基于所述稳定性边界条件分析结果,采用参数敏感性分析方法,通过计算机器人控制响应对参数变动的敏感度,评估参数的变化,对参数变化进行稳定性转变,生成临界参数值识别结果;
25、s403:基于所述临界参数值识别结果,采用分岔理论,分析在临界参数值附近行为的变化,通过数学建模分析参数变化导致的分支行为,生成稳定性调整参数。
26、作为本发明的进一步方案,基于所述稳定性调整参数,采用决策树算法进行决策优化,通过构建决策树模型,对特征信息进行分类和回归分析,根据特征值的差异化分支选择,优化决策过程,并通过确定最优张拉时机和位置,生成张拉执行策略的步骤具体为;
27、s501:基于所述稳定性调整参数,采用决策树算法,对机器人控制特征进行分类和回归分析,通过构建树状结构模型,根据特征值的差异化分支条件,逐层筛选和分割数据集,捕捉最优决策路径,通过特征的关键性评估,优化决策过程,生成决策树模型框架;
28、s502:基于所述决策树模型框架,采用特征选择技术,通过分析特征对决策结果的贡献度,选取特征进行模型训练,简化模型结构,减少过拟合风险,提升模型的预测精度和决策效率,生成特征优化决策模型;
29、s503:基于所述特征优化决策模型,采用模型验证和测试方法,通过对模型进行交叉验证和差异化场景下的性能测试,验证模型的泛化能力和准确性,根据测试结果调整模型参数,优化决策过程,生成张拉执行策略。
30、作为本发明的进一步方案,基于所述张拉执行策略,应用支持向量机模型进行实时控制决策,通过构建超平面,对样本空间进行分割,根据样本特征将决策问题转换为捕捉最优分割超平面的问题,进行数据分类,优化控制策略,并根据环境变化实时调整,收集执行反馈,生成最终执行指令及反馈信息的步骤具体为;
31、s601:基于所述张拉执行策略,采用支持向量机模型,对实时控制决策进行分类和回归分析,通过构建最优分隔超平面,将数据集分割为差异化类别,根据样本特征和超平面的间隔原则,优化分类决策,根据实时数据调整超平面位置,匹配环境变化,生成控制策略优化模型;
32、s602:基于所述控制策略优化模型,采用交叉验证方法,通过分割数据集进行多轮训练和验证,评估模型在未知数据上的表现,捕捉模型参数的最优配置,根据参数调优结果,优化模型的决策能力,生成参数优化控制模型;
33、s603:基于所述参数优化控制模型,实施环境匹配性调整,根据环境变化和实时反馈数据调整控制策略,优化模型的实时响应能力,收集执行结果和性能反馈,进行动态优化和性能监控,生成最终执行指令及反馈信息。
34、一种智能张拉机器人的张拉控制系统,所述智能张拉机器人的张拉控制系统用于执行上述智能张拉机器人的张拉控制方法,所述系统包括环境感知模块、图构建模块、特征分析模块、路径决策模块、稳定性评估模块、执行策略模块、反馈调整模块。
35、作为本发明的进一步方案,所述环境感知模块基于机器人的初始环境信息,采用激光雷达扫描算法,通过发射激光束并接收其反射信号测量与周围物体的距离,结合计算机视觉算法,通过图像识别技术识别环境特征和障碍物,生成环境地形图谱;
36、所述图构建模块基于环境地形图谱,采用图论算法,将收集到的环境数据转化为图形表示,节点表示环境中的关键点,边表示节点间的可通行路径,优化图的连接性,生成环境拓扑结构;
37、所述特征分析模块基于环境拓扑结构,采用图卷积网络算法,通过在图上应用卷积操作提取节点的深层特征,利用节点的邻域信息增强特征表示的能力,对环境的关键几何和拓扑特征进行学习,生成环境特征信息数据;
38、所述路径决策模块基于环境特征信息数据,采用图注意力网络算法,通过为图中的节点分配差异化的注意力权重,强化关键节点的影响力,综合考量路径的效率和安全性,生成优化后的路径规划;
39、所述稳定性评估模块基于优化后的路径规划,采用动态机器人控制理论和李雅普诺夫稳定性分析方法,通过计算机器人控制在动态条件下的响应,识别导致机器人控制不稳定的参数变化,评估和调整路径规划的稳定性,生成稳定性调整参数;
40、所述执行策略模块基于稳定性调整参数,采用基于决策树的优化策略,通过分析执行方案的结果,选择最优张拉力度、时间和顺序,生成张拉执行策;
41、所述反馈调整模块基于张拉执行策略,采用支持向量机算法,通过构建最优决策边界,分类执行过程中的状态反馈,根据反馈结果实时调整执行策略,生成执行指令及反馈信息。
42、与现有技术相比,本发明的优点和积极效果在于:
43、本发明中,通过利用dijkstra算法构建的环境拓扑结构,结合图卷积网络算法对环境的几何和物理约束进行深度特征提取,有效地提高环境信息的表示准确性。通过图注意力网络模型的动态路径规划,实现对关键路径点的动态关注,优化了路径的效率、安全性和可行性。李雅普诺夫稳定性理论的应用,增强动态系统的稳定性分析和分岔控制能力,从而提升对环境变化的适应性和鲁棒性。决策树算法和支持向量机模型的结合,进一步优化了决策过程和实时控制策略,使得机器人能够在复杂环境中作出更加精准和稳定的控制决策。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199975.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表