一种基于双稳态随机共振的水下机器人区域跟踪控制方法
- 国知局
- 2024-08-01 00:12:40
本发明专利涉及水下机器人控制,特别是涉及一种基于双稳态随机共振的水下机器人区域跟踪控制方法。
背景技术:
1、水下机器人通过携带传感器来执行类似管道泄漏检测等任务时,往往要求跟踪误差在预设范围内即可,不需要追求过高精度,而是希望能降低控制量波动和控制引起的不必要能耗。
2、目前,区域跟踪控制方法主要从势能函数和预设性能控制两个角度展开研究。常规基于预设性能函数的区域跟踪控制方法是利用预设误差边界,构建势能函数,以此在反步法的框架下推导区域跟踪控制律,该方法的一个问题是往往位置误差维持在预设边界上波动,而非在预设边界范围内波动。基于预设性能控制的区域跟踪控制方法,则是在传统预设性能控制方法的基础上,通过引入误差非线性变换来尽可能放大跟踪误差。尽管该方法可以保证跟踪误差始终在规定的边界内,但如何在规定的范围内放大跟踪误差以减少控制输入的波动仍然需要进一步研究。
技术实现思路
1、针对上述问题,本发明提出一种基于双稳态随机共振的水下机器人区域跟踪控制方法。
2、本发明的技术方案:一种基于双稳态随机共振的水下机器人区域跟踪控制方法,
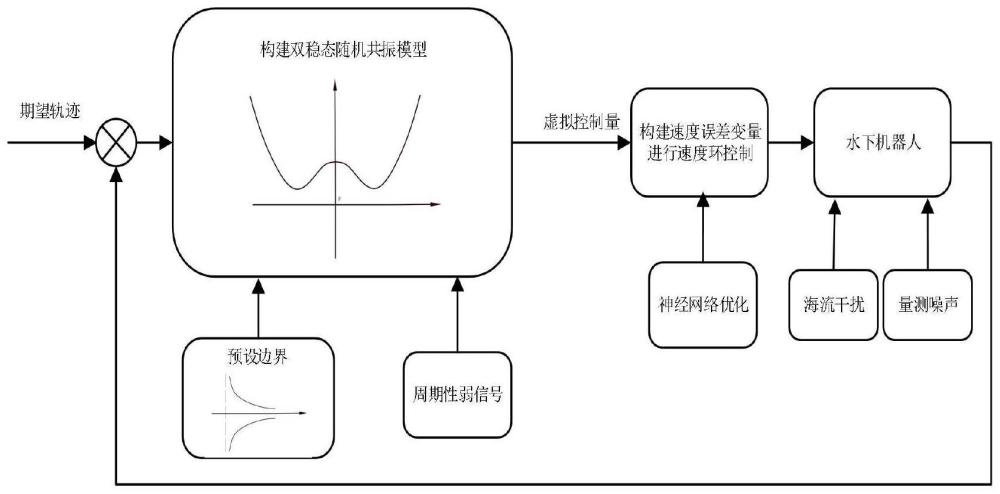
3、步骤1:结合水下机器人区域跟踪的任务需求,将位置跟踪误差被视为布朗粒子,速度误差信号视为噪声,构建虚拟控制变量,结合给定的预设边界建立位置跟踪误差的双稳态随机共振模型。
4、步骤2:结合水下机器人动力学模型以及步骤1中给出的虚拟控制变量,构建速度误差变量,基于神经网络估计,推导控制律和自适应律。
5、步骤3:结合步骤1和2,进行稳定性分析,论证速度误差的有界性;以及论证步骤1中,在虚拟控制变量中周期性弱信号的作用下,将速度误差这一噪声信号的能量向位置误差转移,实现位置误差的随机共振,即在两个势阱之间自由切换,实现了位置误差的区域跟踪。
6、作为优选方案:
7、所述的步骤1具体为:
8、将跟踪误差设计为e1=x-xd,其中x、xd是所需的位置变量;
9、构建虚拟控制变量α,其表达式为:
10、其中,β1和μ1为势阱参数,a1i和为周期性弱信号的幅值和角频率参数;
11、建立位置跟踪误差的双稳态随机共振模型;
12、双稳态随机共振模型可以描述为过阻尼布朗粒子在双稳态势阱之间的跃迁运动;基于虚拟控制变量及随机共振理论,建立位置跟踪误差的双稳态随机共振模型,如下:
13、
14、作为优选方案:
15、所述的步骤2具体为:
16、根据等式(1),虚拟控制变量是连续的,并且其相对于时间的一阶导数也是可用的,推导定义速度误差变量:
17、
18、水下机器人动力学模型为以下表达式:
19、
20、其中,是未知的非线性函数;是已知的控制增益,并且对应的逆矩阵是可用的;
21、m表示推进器的数量;
22、表示制动器的控制输入;
23、代表有界扰动;
24、根据等式(3)和(4),将速度误差变量e2的导数可以写为
25、
26、由于函数是未知但连续的,本发明使用rbf神经网络对其进行近似;
27、基于神经网络的估计理论,存在一个理想但未知的加权矩阵w*,使得未知函数可以描述为:
28、
29、其中,隐藏层的输出矢量
30、
31、ε是近似误差且是有界的;
32、的表达式为:
33、
34、其中,ci和σi(i=1,2,…,p)分别是中心矢量和宽度矢量;
35、rbf神经网络的估计输出如下所示:
36、
37、其中,和是和w*的相应估计值;
38、基于双稳态随机共振模型和虚拟控制变量,控制律设计如下:
39、
40、其中,
41、
42、β2和μ2为设计参数;
43、a2i和为周期性弱信号幅值和角频率;
44、的自适应律为:
45、
46、其中,λw为大于零的常数。
47、作为优选方案:
48、所述的步骤3为:
49、区域跟踪的稳定性分析包括两个部分:有界性分析和区域跟踪分析
50、速度误差有界性分析:
51、考虑以下李雅普诺夫函数
52、
53、根据方程(5)、(9)、(10),v的导数可写为:
54、
55、由于近似误差ε和周期信号ξ2(t)是有界的,因此存在一个正常数θ,当||e2||≥θ时,不等式成立;
56、因此,李雅普诺夫函数v是有界的,即e2是有界;
57、e1的区域分析:
58、结合公式(2)和(3),位置误差导数可以改写为:
59、
60、由等式(1)可知,ξ1(t)是周期信号,且从公式(12)已论证e2是有界的,可以将其视为噪声;
61、基于双稳态随机共振理论,根据位置误差预设边界,选择合适的势阱参数β1和μ1,布朗粒子e1将在底部位于的两个势阱之间切换,完全符合区域跟踪的目的;
62、考虑到势阱是围绕经典双稳态势的局部最小值的区域,应该相对小于规定的正边界;跟踪误差的规定范围为±ka(ka>0),则应满足不等式
63、有益效果:
64、现有区域跟踪方法不能充分利用位置误差的预设边界,有的是在预设边界上波动,有的则是在零范围内小幅度波动。本发明专利设计一种新的区域跟踪控制方案,可以尽可能利用跟踪误差的规定边界来减少控制量波动和控制量引起的不必要能耗。通过仿真对比分析,本发明专利提供的区域跟踪控制方法在区域跟踪指标上以及能耗指标上均具有明显优势。适合应用于水下机器人进行水下探测等任务中。
技术特征:1.一种基于双稳态随机共振的水下机器人区域跟踪控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于双稳态随机共振的水下机器人区域跟踪控制方法,其特征在于,
3.根据权利要求1所述的一种基于双稳态随机共振的水下机器人区域跟踪控制方法,其特征在于,
4.根据权利要求1所述的一种基于双稳态随机共振的水下机器人区域跟踪控制方法,其特征在于:
技术总结本发明涉及一种基于双稳态随机共振的水下机器人区域跟踪控制方法,属于水下机器人控制技术技术领域,结合水下机器人区域跟踪的任务需求,将位置跟踪误差被视为布朗粒子,速度误差信号视为噪声,构建虚拟控制变量,结合给定的预设边界建立位置跟踪误差的双稳态随机共振模型;结合水下机器人动力学模型以及步骤中给出的虚拟控制变量,构建速度误差变量,基于神经网络估计,推导控制律和自适应律;实现位置误差的随机共振,在两个势阱之间自由切换,实现了位置误差的区域跟踪。利用跟踪误差的规定边界来减少控制量波动和控制量引起的不必要能耗。提供的区域跟踪控制方法在区域跟踪指标上以及能耗指标上均具有明显优势。技术研发人员:刘星,王童,李佶桃,姚峰,林旭,时旭阳,张铭钧,耿博,颜英琪受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200011.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。