一种基于无人机的输电线路协同巡检系统的制作方法
- 国知局
- 2024-08-01 00:14:11
本发明涉及无人机巡检领域,尤其涉及一种基于无人机的输电线路协同巡检系统。
背景技术:
1、现有技术在利用多架无人机协同的方式对输电线路所在的区域进行巡检的过程中,通常需要对该区域进行划分,得到多个面积相同的矩形的工作区域。然后,由携带有多架无人机的车辆,将无人机运输至输电线路所在的区域的中心,之后,再释放无人机,由车辆上携带的控制设备作为控制中心,分别控制每个无人机负责对一个工作区域进行巡检。
2、但是,这种划分方式并没有考虑到蜂窝网络不存在的情况。当需要巡检的输电线路位于比较偏远的地方,而这些地方不存在蜂窝网络(如4g、5g等)时,就需要依靠无人机之间组成自组网来实现无人机与无人机控制中心之间的通信,或者是,为每一架无人机都安装卫星通信组件,通过卫星通信的方式与无人机控制中心之间进行通信。
3、如果分别为每一架无人机安装卫星通信组件,一方面是硬件成本提升,另一方面是,使用卫星通信也需要缴纳相应的费用,显然,这样会导致巡检的成本提升比较多。
4、而如果采用自组网的方式来进行通信,由于划分为相同面积的工作区域之后,不同的工作区域中的无人机与无人机控制中心之间的距离并不相同,不同的工作区域的无人机的巡检过程的电量消耗速度也不同,这也就导致了不同的工作区域中的无人机的滞空时间差别较大,显然会影响自组网的稳定性,例如,部分处于通信链路上的无人机由于巡检的工作量过大而电量被快速消耗提前返航,这就会导致需要依靠该无人机才能实现与控制中心之间进行通信的其他无人机只能够提前退出工作,依靠rth功能返回控制中心。这样,便会可能使得该工作区域中的输电线路没有被完全巡检完成,影响了巡检的效率,需要另外排除无人机对未巡检完成的区域进行巡检。
5、因此,在对不存在蜂窝网络的区域中的输电线路进行巡检时,如何对划分工作区域的方式进行改进,以使得其适合自组网的需要,降低对输电线路进行巡检的效率的影响,便成为要解决的技术问题。
技术实现思路
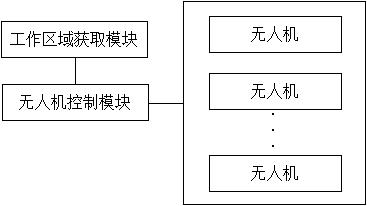
1、本发明的目的在于公开一种基于无人机的输电线路协同巡检系统,解决利用自组网的方式控制无人机对输电线路进行巡检时,如何改进工作区域的划分方式,从而能够在实现自组网的同时,保证巡检效率的问题。为了达到上述目的,本发明采用如下技术方案:本发明提供了一种基于无人机的输电线路协同巡检系统,包括工作区域获取模块、无人机控制模块和无人机;工作区域获取模块用于获取工作区域,并将工作区域传输至无人机控制模块;无人机控制模块用于分别为每个工作区域中的输电线路的巡检过程规划巡检路线,用于将巡检路线分别传输至每架无人机,以及用于控制无人机飞行至对应的工作区域;其中,获取工作区域,包括:s1,获取标注有需要巡检的输电线路的平面地图;s2,对平面地图进行裁剪,得到裁剪图像;s3,获取无人机控制模块在裁剪图像中的部署坐标;s4,基于部署坐标对裁剪图像进行划分,将裁剪图像分为多个工作区域;第一轮划分的过程:将裁剪图像分为n张面积一样的子图像,将得到的子图像作为集合中的元素;分别计算中每张子图像的划分判断值;将中划分判断值大于划分判断值阈值的子图像作为集合的元素,将中划分判断值小于等于划分判断值阈值的子图像作为工作区域集合中的元素;第s轮划分的过程:分别将中的每个元素分为n张面积一样的子图像,将得到的子图像作为集合中的元素,s大于等于2;分别计算中每张子图像的划分判断值;将中划分判断值大于划分判断值阈值的子图像作为集合的元素,将中划分判断值小于等于划分判断值阈值的子图像作为工作区域集合中的元素;判断是否为空集,若是,则将工作区域集合中,不包含输电线路的子图像删除,将工作区域集合中的每张子图像所在的区域作为一个工作区域,退出划分的过程;若否,则进入下一轮划分的过程。可选的,分别为每个工作区域中的输电线路的巡检过程规划巡检路线,包括:将工作区域分为多个局部区域;将不包含输电线路的局部区域删除后,将剩下的每个局部区域的中点分别作为一个巡检点;采用最短路径算法规划经过所有的巡检点的巡检路线。
2、可选的,将工作区域分为多个局部区域,包括:获取无人机在最大拍摄高度单次停留拍摄的区域的面积d;将工作区域分为多个面积为d的区域。
3、可选的,将巡检路线分别传输至每架无人机,包括:分别为每个工作区域随机匹配一架用于对工作区域中的输电线路进行巡检的无人机;将工作区域对应的巡检路线发送至对应的无人机。
4、可选的,控制无人机飞行至对应的工作区域,包括:按照工作区域的中心与无人机控制模块之间的距离从低到高的顺序依次控制每架无人机进行起飞,控制前一架无人机到达对应的工作区域之后,才控制后一架无人机起飞;在控制每架无人机起飞时,控制最新起飞的无人机加入自组网络;若最新起飞的无人机对应的工作区域与无人机控制模块之间的最远距离小于等于最新起飞的无人机的最大通信距离,则无人机控制模块采用单跳通信的方式控制最新起飞的无人机飞行至最新起飞的无人机对应的工作区域的中心;若最新起飞的无人机对应的工作区域与无人机控制模块之间的最远距离大于最新起飞的无人机的最大通信距离,则通过自组网络,对最新起飞的无人机进行控制,直至到最新起飞的无人机飞行至对应的工作区域。
5、可选的,控制最新起飞的无人机加入自组网络,包括:对于最新起飞的无人机a;若无人机a所在的工作区域与无人机控制模块之间的最远距离小于等于无人机a的最大通信距离,则将无人机a作为自组网络的第一跳节点;若无人机a对应的工作区域与无人机控制模块之间的最远距离大于无人机a的最大通信距离,则无人机a在飞行至对应的工作区域的过程中,定期刷新处于无人机a的最大通信距离范围内的所有已经起飞的无人机的集合,从中选择距离无人机控制模块最远的另一架无人机作为前一跳节点b;无人机a在选择好前一跳节点b之后,向前一跳节点b发送包含无人机a的编号的入网通知;前一跳节点b在接收到无人机a的入网通知之后,更新通信路由表,将无人机a作为下一跳节点;并通过自组网络将无人机a的入网通知发送至无人机控制模块;无人机控制模块根据无人机a的入网通知的传输路径,更新已存在的自组网络的拓扑结构;当无人机a离开前一跳节点b的通信范围之后,前一跳节点b通过自组网络向无人机控制模块发送无人机a的离网通知,并在通信路由表中,将无人机a删除;无人机控制模块根据无人机a的离网通知,更新已存在的自组网络的拓扑结构,将无人机a从自组网络的拓扑结构中删除。
6、可选的,通过自组网络,对最新起飞的无人机进行控制,直至到最新起飞的无人机飞行至对应的工作区域,包括:通过自组网络,向最新起飞的无人机发送飞行控制指令,直至到最新起飞的无人机飞行至对应的工作区域的中心。
7、可选的,对平面地图进行裁剪,得到裁剪图像,包括:以平面地图中的正北方向为y轴的方向,以正东方向为x轴的方向,建立直角坐标系;分别用zma和zxa表示平面地图中,属于输电线路的像素点在x轴的坐标的最小值和最大值;分别用zmb和zxb表示平面地图中,属于输电线路的像素点在y轴的坐标的最小值和最大值;则对平面地图进行裁剪之后,裁剪图像中的像素点的坐标在直角坐标系中的范围为:;x和y分别为裁剪图像中的像素点在x轴的坐标和在y轴的坐标。
8、可选的,获取无人机控制模块在裁剪图像中的部署坐标,包括:将所有包含输电线路的局部区域的中点作为集合locu中的元素;使用预设的算法求取裁剪图像中与locu中的所有像素点的总距离最小的像素点b,将像素点b的坐标作为无人机控制模块在裁剪图像中的部署坐标。
9、可选的,划分判断值的计算公式如下:;表示子图像b的划分判断值,表示裁剪图像的边缘到部署坐标的距离的最大值,表示子图像b的中心与部署坐标之间的距离,表示子图像b中属于输电线路的区域的面积,表示裁剪图像的面积,表示无人机的通信半径,表示子图像b的最大内接圆的直径,、和分别为设置的距离的权重、面积的权重和半径的权重。
10、有益效果:本发明采用了改进的方式来对需要巡检的输电线路所在的区域进行分区,并不是直接将需要巡检的输电线路所在的区域分为面积相同的工作区域,而是通过先获取部署坐标,然后基于部署坐标来进一步进行划分,每一轮划分的过程,都将新得到的子图像的划分判断值与提前设置的划分判断值阈值来进行比较,从而使得获取到的每个工作区域的总耗电量,即往返的的耗电量以及巡检过程所需要的耗电量尽可能地接近,降低了不同的无人机的滞空时间之间的差异,从而能够有效地提高无人机组成的自组网的稳定性,从而能够在实现自组网的同时,避免个别的无人机在未完成巡检时就因为巡检耗电量过大而提前返航,保证了巡检效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200143.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。