基于LQR控制器的双轮机器人平衡控制方法、系统、存储介质及计算机设备
- 国知局
- 2024-08-01 00:14:02
本发明涉及机器人技术,具体涉及一种基于lqr控制器的双轮机器人平衡控制方法、系统、存储介质及计算机设备。
背景技术:
1、轮足机器人具有快速灵活的移动能力,可以适用多种应用场景。但移动机器人不同于传统工业机器人,其工作环境往往复杂多变。在实际工作过程中,轮足机器人极有可能受到强烈的扰动,大幅度偏离平衡位置,从而导致倾倒。此外,传统的平衡控制算法通常是基于经验和直觉进行调参的,缺乏系统化的优化方法,需要耗费大量的时间和工作量且调参结果往往不够理想。
2、目前lqr控制是两轮足机器人自平衡控制的主要手段,lqr控制能够根据系统的动力学特性,为轮足机器人此类具有复杂动力学的系统提供良好的控制性能。但是传统的lqr控制器权重矩阵只能依靠先验知识定性的选择,无法达到最优的控制效果。此外,传统的lqr控制器是基于轮足机器人系统在平衡点位置的动力学特性进行设计的,在远离平衡位置时,无法对轮足机器人进行可靠、有效的控制。
技术实现思路
1、本发明的目的是为了克服以上现有技术存在的不足,提供了一种基于lqr控制器的双轮机器人平衡控制方法。此基于lqr控制器的双轮机器人平衡控制方法解决了lqr的权重矩阵只能依靠先验知识定性的选择的问题,保证双轮足机器人具备良好的稳定性,更好地适应环境的变化和不确性。
2、本发明的第二目的是提供了一种双轮足机器人平衡控制系统。
3、本发明的第三目的是提供了一种存储介质。
4、本发明的第四目的是提供了一种计算机设备。
5、本发明的第一目的通过以下的技术方案实现:本基于lqr控制器的双轮机器人平衡控制方法,包括以下步骤:
6、s1、对双轮足机器人进行建模,以确定双轮足机器人的状态空间方程:
7、
8、其中,为轮轴速度,x为轮轴位移,u为驱动轮的驱动力矩,a为系统矩阵,b为控制矩阵;
9、s2、基于状态空间方程设计lqr控制器,此lqr控制器的状态反馈为:
10、ulqr=-kx;
11、k为反馈矩阵,k=r-1btp,而p由riccati方程解得:
12、atp+pa+q-pbr-1btp=0;
13、其中,q为各个状态变量的权重矩阵,r为正定矩阵;
14、s3、采用差分进化算法对q和r进行优化,得到一个k值,使代价函数最小,其中代价函数为:
15、
16、s4、再使用rbf神经网络对lqr控制器的非线性误差进行补偿。
17、步骤s3包括以下具体步骤:
18、s31、令q为4×4半正定对角矩阵,r为2×2正定对角矩阵;设种群规模为np,迭代次数为g,待优化变量的维数为d=6,第g代的第i个个体为:种群的初始个体为:
19、s32、对种群的每一个个体实施变异操作,得到新的变异个体:
20、
21、其中,r1,r2,r3∈{1,2,…,np}为互不相同的个体编号,变异算子fmax为初始变异率,第g+1代个体为父代基向量与父代差分向量乘以缩放因子f之和;
22、s33、对实施交叉操作生成试验个体
23、
24、其中,k(i)为[0,1]之间的随机数,个体之间的交叉概率其中,crmax为初始交叉率,gmax为最大迭代次数;
25、s34、将实验个体进行模型仿真,得双轮机器人的位移误差、倾斜角角度误差和lqr输出量的加权和构成积分性能指标itae:
26、
27、选择性能指标最低的个体即新种群的个体:
28、
29、s35、判断新种群的个体是否满足终止条件上:
30、若满足,输出结果;
31、若不满足,重复s32~34产生新种群。
32、步骤s35中的终止条件为:
33、当前迭代次数g≥gmax,或个体的积分性能指标其中gmax、itaemin分别为最大迭代次数、性能指标预期值。
34、步骤s4包括以下步骤:
35、s41、在lqr控制器中,线性化误差δ是影响摆角θ的稳定的关键因素,将影响摆动力学的集总扰动表示为:
36、δ4=2(i1×4,4pbt)-1i1×4,4pδ,其中,i1×4,4=[0,0,0,1];
37、s42、基于神经网络的学习特性对扰动用以下线性组合来建模:
38、其中,w为最优加权向量,为模型输出值与实际扰动值之间的误差,
39、γ(x3)为一个软选择函数:δ是表示函数方差的常数,
40、为神经网络隐藏层的传输值:为高斯核函数:c是高斯函数的中心点向量,σ是平滑因子;
41、s43、采用基于在线间接监督学习方法对神经网络进行训练,在线间接监督学习律为:
42、
43、其中,η为学习率,a为学习机制的阻尼率;
44、s44、rbf神经网络的输出值unn即为对双轮足机器人的摆动力学非线性特性的补偿值,经过补偿后的控制信号为:u=ulqr+unn。
45、基于lqr控制器双轮足机器人平衡控制系统,包括数据采集模块和执行模块,
46、所述数据采集模块,用于双轮足机器人的轮轴速度、轮轴位移、倾角角度、倾角角速度数据、电机编码器反馈的位移和水平速度,以获取双轮足机器人的运动状态;
47、执行模块,用于执行第二目的所述的双轮足机器人平衡控制方法。
48、工作介质,存储有程序,所述程序被处理器执行时,实现第三目的中任一项所述的基于lqr控制器双轮足机器人平衡控制方法。
49、计算机设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现第四目的所述的基于lqr控制器双轮足机器人平衡控制方法。
50、本发明相对于现有技术具有如下的优点:
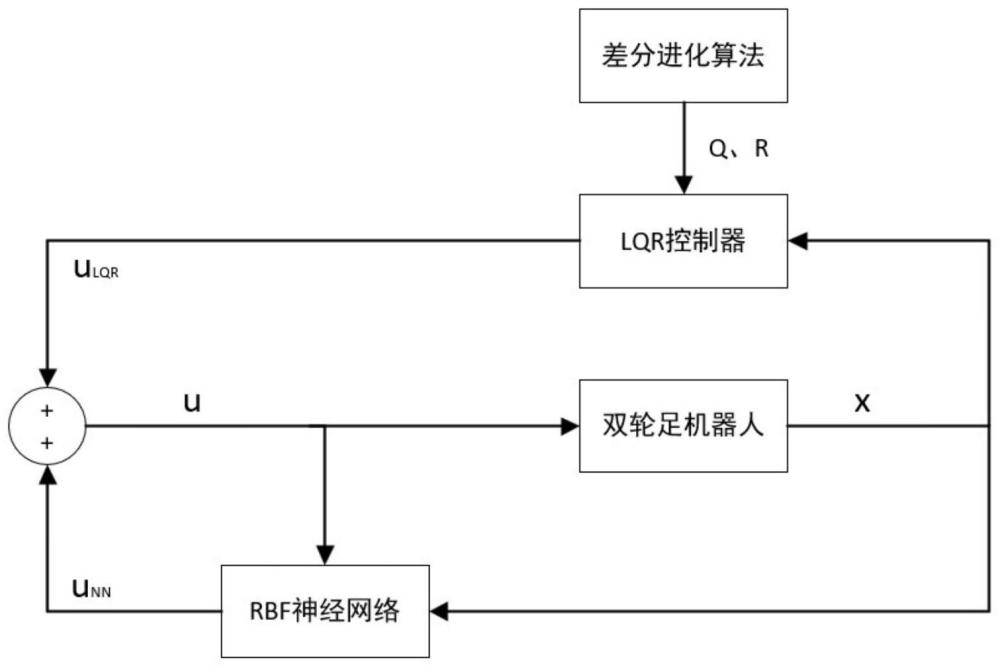
51、本发明使用差分进化算法对线性二次调节器(lqr)算法中的权重矩阵q、r进行优化;根据差分进化算法(de)优化得到的权重矩阵q、r,设计一个传统的lqr控制器来稳定系统在平衡位置的输出;采用具有特殊平滑分段的双层径向基神经网络生成智能控制信号,补偿系统远离平衡姿态时lqr控制器的线性化误差,从而解决了lqr的权重矩阵只能依靠先验知识定性的选择的问题,消除了人为主观因素,达到了在选定指标下的理论最优;克服了传统的lqr控制器在远离平衡位置时,由于系统的动力学变得非线性,违背了lqr算法的线性化假设,从而使lqr控制器无法有效地控制轮足机器人的问题。同时,本发明采用了差分进化算法和具有非线性补偿的神经网络,这使双轮足机器人具有良好的稳定性,可更好地适应环境的变化和不确定性。
技术特征:1.基于lqr控制器的双轮机器人平衡控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于lqr控制器的双轮机器人平衡控制方法,其特征在于,步骤s3包括以下具体步骤:
3.根据权利要求2所述的基于lqr控制器的双轮机器人平衡控制方法,其特征在于,步骤s35中的终止条件为:
4.根据权利要求2所述的基于lqr控制器的双轮机器人平衡控制方法,其特征在于,步骤s4包括以下步骤:
5.基于lqr控制器双轮足机器人平衡控制系统,其特征在于,包括数据采集模块和执行模块,
6.工作介质,存储有程序,其特征在于,所述程序被处理器执行时,实现权利要求1~4中任一项所述的基于lqr控制器双轮足机器人平衡控制方法。
7.计算机设备,包括处理器以及用于存储处理器可执行程序的存储器,其特征在于,所述处理器执行存储器存储的程序时,实现权利要求1~4中任一项所述的基于lqr控制器双轮足机器人平衡控制方法。
技术总结本发明公开了一种基于LQR控制器的双轮机器人平衡控制方法、系统、存储介质及计算机设备,其中基于LQR控制器的双轮机器人平衡控制方法使用差分进化算法对LQR控制器算法中的权重矩阵Q、R进行优化;根据差分进化算法优化得到的权重矩阵Q、R,以改进LQR控制器来稳定系统在平衡位置的输出;采用具有特殊平滑分段的双层径向基神经网络生成智能控制信号,补偿系统远离平衡姿态时LQR控制器的线性化误差。本发明解决了LQR的权重矩阵只能依靠先验知识定性的选择的问题,消除了人为主观因素,达到了在选定指标下的理论最优,提升了双轮机器人的稳定性。技术研发人员:邹焱飚,弋浩博,张铁受保护的技术使用者:华南理工大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200134.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表