基于数据分析的司控器智能控制方法及系统与流程
- 国知局
- 2024-08-01 00:13:29
本发明涉及数据处理,尤其涉及一种基于数据分析的司控器智能控制方法及系统。
背景技术:
1、地铁系统作为现代城市交通的重要组成部分,承担着大量的客运任务,要求系统运行稳定、高效、安全。司控器作为地铁列车的核心控制单元,通过监测和调节列车的速度、制动压力、牵引电流和车厢温度等参数,确保列车在轨道上的正常运行和乘客的舒适度。近年来,随着地铁线路的扩展和客流量的增加,传统的司控器控制方法逐渐暴露出其在复杂运行环境中适应性差、响应速度慢等问题,迫切需要引入智能化的控制技术来提升系统的整体性能。
2、现有的司控器控制技术主要依赖于预设的规则和固定的控制策略,缺乏对实时数据的动态分析和调整能力。这种静态控制方法在面对复杂多变的运行环境和突发状况时,往往无法及时做出有效的响应,导致系统效率低下和安全隐患增加。此外,传统控制技术对大量历史数据的利用不足,未能充分挖掘数据中的规律和模式,导致系统优化和预测能力有限。因此,迫切需要一种基于数据分析和智能算法的司控器控制方法,通过实时监测和动态调整,提升地铁系统的运行效率和安全性。
技术实现思路
1、有鉴于此,本发明实施例提供了一种基于数据分析的司控器智能控制方法及系统,用于提高基于数据分析的司控器智能控制的准确率。
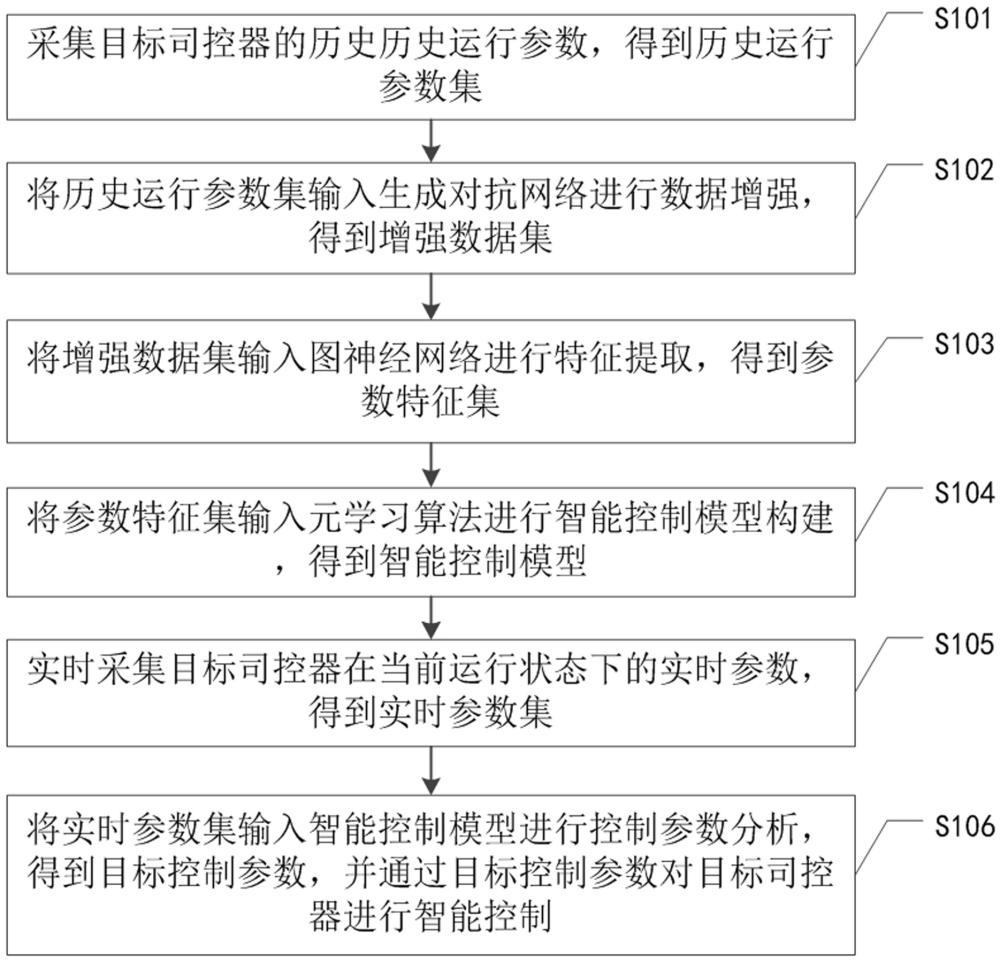
2、本发明提供了一种基于数据分析的司控器智能控制方法,包括:采集目标司控器的历史运行参数,得到历史运行参数集,其中,所述历史运行参数集包括:温度数据、压力数据、位移数据以及电流数据;
3、将所述历史运行参数集输入生成对抗网络进行数据增强,得到增强数据集;
4、将所述增强数据集输入图神经网络进行特征提取,得到参数特征集,其中,所述参数特征集包括:时序特征、频域特征、温度变化趋势以及压力变动模式;
5、将所述参数特征集输入元学习算法进行智能控制模型构建,得到智能控制模型;
6、实时采集所述目标司控器在当前运行状态下的实时参数,得到实时参数集;
7、将所述实时参数集输入所述智能控制模型进行控制参数分析,得到目标控制参数,并通过所述目标控制参数对所述目标司控器进行智能控制。
8、在本发明中,所述将所述历史运行参数集输入生成对抗网络进行数据增强,得到增强数据集步骤,包括:
9、对所述历史运行参数集进行数据清洗,得到清洗参数集;
10、对所述清洗参数集进行归一化处理,得到归一化参数集;
11、将所述归一化参数集输入所述生成对抗网络的生成器进行数据增强,得到初始增强数据集;
12、将所述初始增强数据集输入所述生成对抗网络的判别器进行数据真实概率分析,得到数据真实概率;
13、根据所述数据真实概率对所述初始增强数据集进行数据扩充,得到所述增强数据集。
14、在本发明中,所述将所述增强数据集输入图神经网络进行特征提取,得到参数特征集步骤,包括:
15、对所述增强数据集进行时序分析,得到时序数据集;
16、对所述时序数据集进行图节点构建,得到多个目标图节点;
17、对所述多个目标图节点进行边数据分析,得到边数据集;
18、根据所述边数据集以及所述多个目标图节点进行图结构构建,得到目标图结构;
19、将所述目标图结构输入所述图神经网络进行特征提取,得到所述参数特征集。
20、在本发明中,所述图神经网络包括:图卷积层、激活函数以及池化层,所述将所述目标图结构输入所述图神经网络进行特征提取,得到所述参数特征集步骤,包括:
21、将所述目标图结构输入所述图卷积层对每个目标图节点进行卷积操作,得到每个目标图节点的特征数据;
22、根据所述激活函数对每个目标图节点的特征数据进行非线性变换,得到每个目标图节点的变换特征数据;
23、将每个目标图节点的变换特征数据输入所述池化层进行平均池化处理,得到每个目标图节点的池化特征数据;
24、对每个目标图节点的池化特征数据进行特征数据转换,得到所述参数特征集。
25、在本发明中,所述对每个目标图节点的池化特征数据进行特征数据转换,得到所述参数特征集步骤,包括:
26、对每个目标图节点的池化特征数据进行时序特征转换,得到每个目标图节点的时序特征;
27、对每个目标图节点的池化特征数据进行频域特征转换,得到每个目标图节点的频域特征;
28、对每个目标图节点的池化特征数据进行温度变化趋势分析,得到每个目标图节点的温度变化趋势数据;
29、对每个目标图节点的池化特征数据进行压力变动模式分析,得到每个目标图节点的压力变动模式;
30、根据每个目标图节点的时序特征,每个目标图节点的频域特征,每个目标图节点的温度变化趋势数据以及每个目标图节点的压力变动模式生成所述参数特征集,其中,所述参数特征集包括:时序特征、频域特征、温度变化趋势以及压力变动模式。
31、在本发明中,所述将所述参数特征集输入元学习算法进行智能控制模型构建,得到智能控制模型步骤,包括:
32、将所述参数特征集输入元学习算法进行训练数据划分,得到训练集以及验证集;
33、将所述训练集输入所述元学习算法进行模型训练,得到初始训练模型;
34、将所述验证集输入所述初始训练模型进行训练参数预测,得到预测参数集;
35、通过预置的损失函数对所述预测参数集进行损失值计算,得到目标损失值;
36、通过所述目标损失值对所述初始训练模型进行模型参数修正,得到所述智能控制模型。
37、在本发明中,所述将所述实时参数集输入所述智能控制模型进行控制参数分析,得到目标控制参数,并通过所述目标控制参数对所述目标司控器进行智能控制步骤,包括:
38、将所述实时参数集输入所述智能控制模型进行司控器运行状态分析,得到当前运行状态;
39、对预设的目标运行状态以及所述当前运行状态进行状态差异参数提取,得到状态差异参数数据;
40、对所述状态差异参数数据进行调控值分析,得到所述状态差异参数数据对应的调控值集合;
41、根据所述调控值集合生成所述目标控制参数,并通过所述目标控制参数对所述目标司控器进行智能控制。
42、本发明还提供了一种基于数据分析的司控器智能控制系统,包括:
43、第一采集模块,用于采集目标司控器的历史运行参数,得到历史运行参数集,其中,所述历史运行参数集包括:温度数据、压力数据、位移数据以及电流数据;
44、增强模块,用于将所述历史运行参数集输入生成对抗网络进行数据增强,得到增强数据集;
45、提取模块,用于将所述增强数据集输入图神经网络进行特征提取,得到参数特征集,其中,所述参数特征集包括:时序特征、频域特征、温度变化趋势以及压力变动模式;
46、构建模块,用于将所述参数特征集输入元学习算法进行智能控制模型构建,得到智能控制模型;
47、第二采集模块,用于实时采集所述目标司控器在当前运行状态下的实时参数,得到实时参数集;
48、分析模块,用于将所述实时参数集输入所述智能控制模型进行控制参数分析,得到目标控制参数,并通过所述目标控制参数对所述目标司控器进行智能控制。
49、本发明提供的技术方案中,历史运行数据的采集和分析提供了系统在各种工况下的运行规律,这些数据经过生成对抗网络(gan)进行增强,提高了数据的多样性和真实性,从而为后续的特征提取和模型训练提供了坚实的基础。通过图神经网络(gnn)对增强数据进行特征提取,捕捉数据中的复杂关系和结构信息,生成包含时序特征、频域特征、温度变化趋势和压力变动模式的参数特征集,为智能控制模型的构建提供了丰富的信息来源。其次,该方案引入了元学习算法进行智能控制模型的训练,通过在多个任务上学习共性,增强了模型的适应性和泛化能力。元学习算法在训练过程中,通过对训练数据和验证数据的合理划分,保证了模型在不同时间段和工况下的表现。在具体实施中,通过将参数特征集划分为多个子任务,元学习算法能够在每个子任务上优化模型参数,使得最终生成的智能控制模型具备快速适应新数据和新任务的能力。通过在验证集上的损失值计算和参数修正,进一步优化了模型性能,确保了智能控制模型在实际应用中的高效性和可靠性。另外,在实时控制方面,方案通过将实时参数集输入智能控制模型,对当前运行状态进行分析,并结合预设的目标运行状态进行状态差异参数提取。通过调控值分析,计算出需要调整的控制参数,生成目标控制参数并应用于地铁司控器,实现了对列车运行状态的动态调整和优化。例如,当实时数据表明列车速度高于预设目标时,智能控制模型能够快速计算出增加制动压力的最佳参数,并通过调整制动系统,及时将速度控制在安全范围内。同时,通过对车厢温度和牵引电流的监测和调整,确保乘客的舒适度和列车的运行效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200087.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表