一种汽车电机控制器运行环境模拟方法及系统与流程
- 国知局
- 2024-08-01 00:16:10
本发明提出了一种汽车电机控制器运行环境模拟方法及系统,属于电机控制器运行环境模拟。
背景技术:
1、汽车电机控制器运行环境模拟通过模拟真实的运行环境,控制器的性能可以在仿真环境中进行评估,这有助于发现潜在的性能瓶颈,识别系统的优化空间,并改进控制算法以满足特定的性能指标,模拟不同的工作条件和系统故障,以验证电机控制器的安全性和可靠性;通过模拟不同路况和负载情况,优化电机控制算法以最大限度地提高能源利用率,并减少对环境的影响;仿真环境可以帮助开发人员快速验证设计概念和改进想法,而无需实际车辆和硬件原型,这有助于缩短开发周期并降低开发成本。
2、但传统的汽车电机控制器运行环境模拟方法通常不够系统化比较分散,而且在模拟复杂真实世界环境方面存在局限性。
技术实现思路
1、本发明提供了一种汽车电机控制器运行环境模拟方法和系统,用以解决上述背景技术中提到的问题:
2、本发明提出的一种汽车电机控制器运行环境模拟方法,所述方法包括:
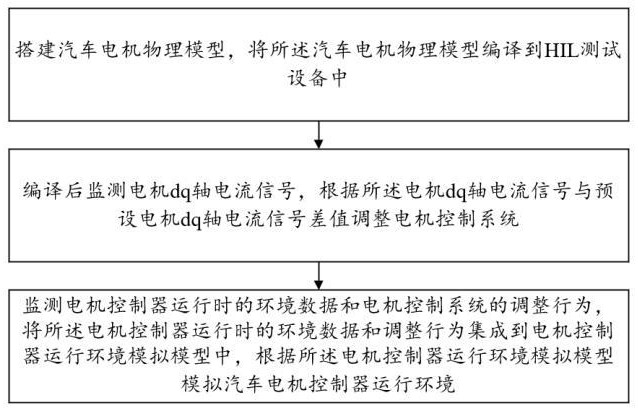
3、搭建汽车电机物理模型,将所述汽车电机物理模型编译到hil测试设备中;
4、编译后监测电机dq轴电流信号,根据所述电机dq轴电流信号与预设电机dq轴电流信号差值调整电机控制系统;
5、监测电机控制器运行时的环境数据和电机控制系统的调整行为,将所述电机控制器运行时的环境数据和调整行为集成到电机控制器运行环境模拟模型中,根据所述电机控制器运行环境模拟模型模拟汽车电机控制器运行环境。
6、进一步的,搭建汽车电机物理模型,将所述汽车电机物理模型编译到hil测试设备中,包括:
7、搭建can通信模型,将所述can通信模型编译到hil测试设备中,获取电机控制器反馈信号,将所述电机控制器反馈信号与预设反馈信号比较,若相差不超过预设基准值,则认为符合预期,继续加载三相逆变器物理模型,否则发送报警信息到可视化设备;
8、搭建三相逆变器物理模型,将所述三相逆变器物理模型编译到hil测试设备中。
9、进一步的,搭建三相逆变器物理模型,将所述三相逆变器物理模型编译到hil测试设备中,包括:
10、三相逆变器接收从板pwm控制信号,并检测桥臂是否导通;
11、若桥臂导通,检测是否是正向导通,若检测到所述桥臂正向导通,计算正向导通时的控制相电压、电流及内阻;
12、若检测到桥臂未导通或桥臂是负向导通,则分别计算未导通时的控制相电压、电流及内阻和负向导通时的控制相电压、电流及内阻;
13、向电机物理模型输出向电压、电流及内阻计算值以构建三相逆变器物理模型;
14、将所述三相逆变器物理模型编译到hil测试设备中。
15、进一步的,编译后监测电机dq轴电流信号,根据所述电机dq轴电流信号与预设电机dq轴电流信号的差值调整电机控制系统,包括:
16、将三相逆变器物理模型编译到hil测试设备中,监测电机dq轴电流信号;
17、若所述电机dq轴电流信号与预设电机dq轴电流信号相差不超过预设阈值时,电机控制系统则进入模拟环境舱,否则发送报警信息到可视化设备;
18、若所述电机dq轴电流信号与预设电机dq轴电流信号相差超过预设阈值时,电机控制器进入反馈控制;
19、进入反馈控制包括:
20、校准电流传感器,校准后监测电机dq轴电流信号;
21、校准后若所述电机dq轴电流信号与预设电机dq轴电流信号相差超过预设阈值,对所述三相逆变器物理模型的参数进行调整,所述参数包括负载和电机特性,调整后监测电机dq轴电流信号;
22、若调整后所述电机dq轴电流信号与预设电机dq轴电流信号相差超过预设阈值,获取跟随度不佳时的dq轴电流和其他关键参数,其他关键参数包括:电机的实际速度、位置、温度、电机控制器的实际电压、pid控制器的增益值和外部环境条件,基于关键参数,使用时域分析技术识别出导致跟随度不佳的异常原因;
23、根据异常原因调整控制算法,直到所述电机dq轴电流信号与预设电机dq轴电流信号相差不超过预设阈值。
24、进一步的,监测电机控制器运行时的环境数据和电机控制系统的调整行为,将所述电机控制器运行时的环境数据和调整行为集成到电机控制器运行环境模拟模型中,根据所述电机控制器运行环境模拟模型模拟汽车电机控制器运行环境,包括:
25、获取电机控制器运行时的环境数据,所述环境数据包括电机控制器所处环境的温度、湿度、电机的负载和电机的转速,并获取电机控制系统在不同环境下的调整行为数据,所述调整行为数据包括所述电机控制器控制信号的变化和功率调整;
26、对获取到的所述环境数据和调整行为数据进行清洗,并对其进行数据对齐;
27、将对齐后的数据分为训练集和测试集;
28、利用所述训练集对lstm模型进行训练,再利用所述测试集对lstm模型进行验证和评估以搭建电机控制器运行环境模拟模型,再将所述电机控制器运行环境模拟模型编译到hil测试设备模拟汽车电机控制器运行环境。
29、本发明提出的一种汽车电机控制器运行环境模拟系统,所述系统包括:
30、搭建物理模型模块,用于搭建汽车电机物理模型,将所述汽车电机物理模型编译到hil测试设备中;
31、调整电机控制系统模块,用于编译后监测电机dq轴电流信号,根据所述电机dq轴电流信号与预设电机dq轴电流信号差值调整电机控制系统;
32、模拟运行环境模块,用于监测电机控制器运行时的环境数据和电机控制系统的调整行为,将所述电机控制器运行时的环境数据和调整行为集成到电机控制器运行环境模拟模型中,根据所述电机控制器运行环境模拟模型模拟汽车电机控制器运行环境。
33、进一步的,所述搭建物理模型模块包括:
34、搭建can通信模型模块,用于搭建can通信模型,将所述can通信模型编译到hil测试设备中,获取电机控制器反馈信号,将所述电机控制器反馈信号与预设反馈信号比较,若相差不超过预设基准值,则认为符合预期,继续加载三相逆变器物理模型,否则发送报警信息到可视化设备;
35、搭建三相逆变器物理模型模块,用于搭建三相逆变器物理模型,将所述三相逆变器物理模型编译到hil测试设备中。
36、进一步的,所述搭建三相逆变器物理模型模块包括:
37、接受控制信号模块,用于三相逆变器接收从板pwm控制信号,并检测桥臂是否导通;
38、检测导通模块,用于若桥臂导通时,检测是否是正向导通,若检测到所述桥臂正向导通,计算正向导通时的控制相电压、电流及内阻;
39、检测负向导通和未导通模块,用于若检测到桥臂未导通或桥臂是负向导通,则分别计算未导通时的控制相电压、电流及内阻和负向导通时的控制相电压、电流及内阻;
40、输出向电压、电流及内阻计算值模块,用于向电机物理模型输出向电压、电流及内阻计算值以构建三相逆变器物理模型;
41、编译模块,用于将所述三相逆变器物理模型编译到hil测试设备中。
42、进一步的,所述调整电机控制系统模块包括:
43、监测电机dq轴电流信号模块,用于将三相逆变器物理模型编译到hil测试设备中,监测电机dq轴电流信号;
44、比较模块,用于若所述电机dq轴电流信号与预设电机dq轴电流信号相差不超过预设阈值时,电机控制器则进入模拟环境舱,否则发送报警信息到可视化设备;
45、反馈控制模块,用于若所述电机dq轴电流信号与预设电机dq轴电流信号相差超过预设阈值时,电机控制器进入反馈控制;
46、所述反馈控制模块包括:
47、校准传感器模块,用于校准电流传感器,校准后监测电机dq轴电流信号,
48、调整参数模块,用于校准后若所述电机dq轴电流信号与预设电机dq轴电流信号相差超过预设阈值,对所述三相逆变器物理模型的参数进行调整,所述参数包括负载和电机特性,调整后监测电机dq轴电流信号;
49、获取关键参数模块,若调整后所述电机dq轴电流信号与预设电机dq轴电流信号相差超过预设阈值,获取跟随度不佳时的dq轴电流和其他关键参数,所述其他关键参数包括:电机的实际速度、位置、温度、电机控制器的实际电压、pid控制器的增益值和外部环境条件,基于关键参数,使用时域分析技术识别出导致跟随度不佳的异常原因;
50、调整控制算法模块,用于根据异常原因调整控制算法,直到所述电机dq轴电流信号与预设电机dq轴电流信号相差不超过预设阈值。
51、进一步的,所述模拟运行环境模块包括:
52、获取环境数据模块,用于获取电机控制器运行时的环境数据,所述环境数据包括电机控制器所处环境的温度、湿度、电机的负载和电机的转速,并获取电机控制系统在不同环境下的调整行为数据,所述调整行为数据包括所述电机控制器控制信号的变化和功率调整;
53、清洗模块,用于对获取到的所述环境数据和调整行为数据进行清洗,并对其进行数据对齐;
54、分数据集模块,用于将对齐后的数据分为训练集和测试集;
55、训练模型模块,用于利用所述训练集对lstm模型进行训练,再利用所述测试集对lstm模型进行验证和评估以搭建电机控制器运行环境模拟模型,再将所述电机控制器运行环境模拟模型编译到hil测试设备模拟汽车电机控制器运行环境。
56、本发明有益效果:通过监测电机dq轴电流信号及与预设值的差异来实时调整电机控制系统,能够保证对电机行为的即时监控和调整,以获得更精准的控制;监测电机控制器运行时的环境数据和调整行为,并将其集成到运行环境模拟模型中,有助于对电机控制器的动态响应进行深入分析和优化,这有望提高汽车电机在各种工况下的性能;利用hil测试设备编译汽车电机物理模型可以大大降低系统部署前的风险;通过在仿真环境中验证,并对电机控制器的环境适应性进行测试,有助于提高系统的可靠性;通过仿真模型来模拟汽车电机控制器的运行环境,有助于在早期发现问题并进行调试,从而降低了在实际汽车电机上进行试验和调整的成本;这一技术方案通过结合环境数据和电机控制器的应对行为,模型可以更准确地模拟出真实世界中的环境情况;这样的模拟将更贴近实际工作条件,能够更好地理解电机控制器对环境变化的反应,并能推断出环境的具体细节,这有助于深入理解控制器在各种工作条件下的行为模式;结合电机控制器的调整行为和传感器检测到的环境数据训练模型使其具备更强的自适应性,这意味着模拟可以更好地适应不同的工作场景和环境变化;模拟环境将会涵盖控制器的各种响应,包括异常情况下的应对行为,这可以为故障模拟和冗余测试提供更多可能性,提高系统的可靠性;模型将更准确地预测电机控制器在未知环境下的行为,这意味着系统可以更好地应对新的、未曾经历过的工作条件;能够了解电机控制器是如何对环境变化做出调整的,有助于深入分析控制系统的内在运行机制,从而支持系统优化和改进;综上所述,利用电机控制器的应对行为和环境数据来训练深度学习模型,将会提高模拟环境的精确度和系统的自适应性,并为确保系统在各种条件下的可靠性打下坚实基础。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200357.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表