一种状态与控制受限的可达集计算方法及系统
- 国知局
- 2024-08-01 00:20:16
本发明涉及航天工程,具体涉及一种状态与控制受限的可达集计算方法及系统。
背景技术:
1、可达集是指系统在未来某个给定时刻可以到达的状态集合,其在安全性验证、控制器设计、轨迹规划等领域有重要应用。比如,对于基于采样的动力学运动规划算法,局部无碰撞可达集的概念代替了路径规划中可视区域的概念,在局部无碰撞可达集外搜索解轨迹是无效的,因此计算有理论保证的低保守性可达集,以实现算法的自适应采样始终是该领域的关注点之一。然而可达性分析却极具挑战,即使对于离散线性时不变系统,其在控制受限的情况下关于给定状态的可达性仍有可能不可判定。
2、kurzhanski等基于椭球集计算方法,开发了椭球工具箱来估计线性系统的可达集。hj可达性分析通过借助水平集工具,并数值求解哈密顿-雅可比-贝尔曼偏微分方程的终值问题,可以较精确地计算一般非线性系统的可达集。然而随着状态空间维数的增加,此类方法的计算负担将呈指数增加。同时,数值结果的网格表示方法和真实可达集的不规则性也阻碍了其在某些领域的应用。近年得益于凸优化技术的发展,平方和规划常被用来检查多项式函数的正定性。tang、singh和jones等对哈密顿-雅可比-贝尔曼偏微分方程进行松弛,并将集合的包含关系和方程的正性叙述为平方和约束,通过求解相应的凸优化问题,得到了系统真实可达集的外部近似或内部近似,从而在一定程度上缓解了维数诅咒。与hj可达性分析的离线计算方式不同,robup!是一种简单有效的可达集快速计算框架。该框架借助随机集理论为算法提供了渐进收敛保障,且所需的系统假设较少,适用于一般的高维非线性系统。但其未在计算过程中考虑状态约束,而航天器存在位置受限及速度受限,因此不适用于航天器的近距离自主交会与行星表面着陆等应用任务。
技术实现思路
1、针对现有技术中存在的未在可达集计算过程中考虑状态约束,存在航天器的位置受限及速度受限,无法适用于航天器的近距离自主交会与行星表面着陆等应用任务的问题。本发明提供了一种状态与控制受限的可达集计算方法,考虑了目标物的状态与控制受限情况,使得计算结果更加符合实际任务需求,并对目标物的状态进行相应调整,确保目标物在安全的前提下,完成复杂的空间任务。
2、与现有技术相比,本发明提供了以下技术方案。
3、一种状态与控制受限的可达集计算方法,包括:
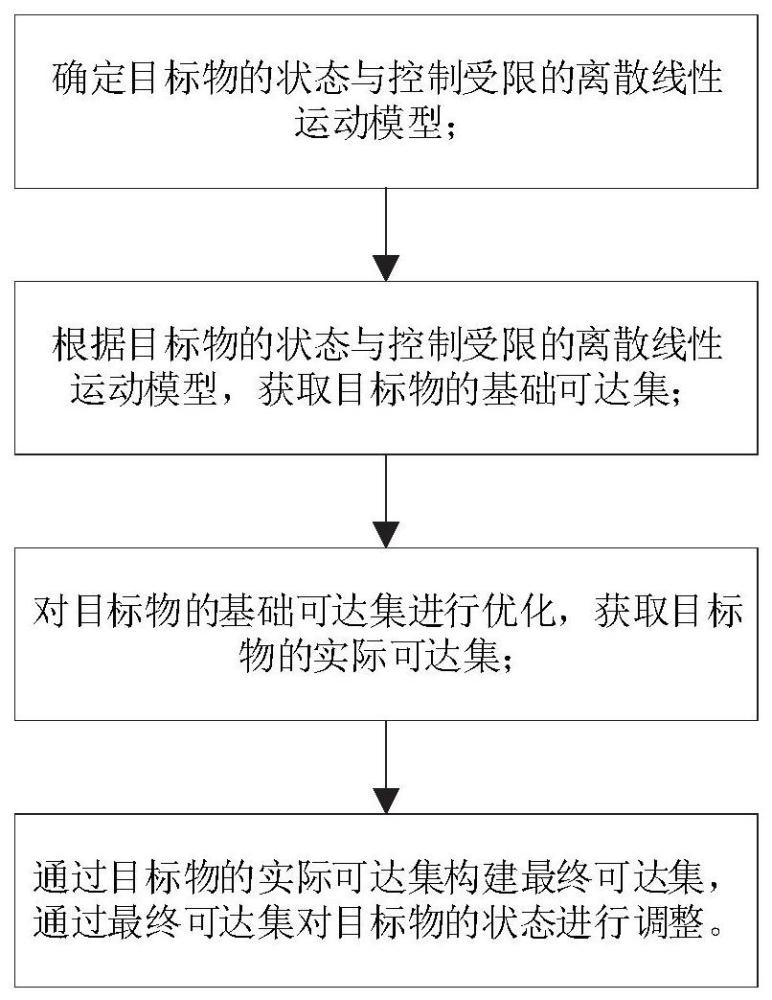
4、确定目标物的状态与控制受限的离散线性运动模型;
5、根据目标物的状态与控制受限的离散线性运动模型,获取目标物的基础可达集;
6、对目标物的基础可达集进行优化,获取目标物的实际可达集;
7、通过目标物的实际可达集构建最终可达集,通过最终可达集对目标物的状态进行调整。
8、作为本发明的进一步改进,所述确定目标物的状态与控制受限的离散线性运动模型,是根据目标物的状态约束、控制约束及运动特性获取的。
9、作为本发明的进一步改进,所述根据目标物的状态与控制受限的离散线性运动模型,通过凸控制代数集合采样和动力学向前传播,获取目标物的基础可达集。
10、作为本发明的进一步改进,所述凸控制代数集合,包括:
11、
12、该式适用于前向可达集情况;
13、
14、该式适用于后向可达集情况。
15、作为本发明的进一步改进,所述根据目标物的状态与控制受限的离散线性运动模型,获取目标物的基础可达集,具体包括:
16、在目标物的状态与控制受限的离散线性运动模型中的超立方体形式的容许控制集合中直接随机生成采样点;
17、若生成采样点位于凸控制代数集合内,则对目标物的状态施加常量控制,产生后继状态;否则在超立方体形式的容许控制集合中重新随机生成采样点;
18、对目标物状态施加常量控制,产生后继状态,直至满足设定终止条件,然后将每个时刻对应的m个状态点的凸包作为基础可达集。
19、作为本发明的进一步改进,所述对目标物的基础可达集进行优化,获取目标物的实际可达集,具体包括:
20、利用目标物的基础可达集计算目标函数关于初始状态和控制量的梯度;
21、根据目标函数关于初始状态和控制量的梯度重新获取控制采样,并通过动力学转播得到后继状态,构建目标物的实际可达集。
22、一种状态与控制受限的可达集计算系统,包括:
23、确定离散运动模型模块:用于确定目标物的状态与控制受限的离散线性运动模型;
24、基础可达集模块:用于根据目标物的状态与控制受限的离散线性运动模型,获取目标物的基础可达集;
25、实际可达集模块:用于对目标物的基础可达集进行优化,获取目标物的实际可达集;
26、目标调整模块:用于通过目标物的实际可达集构建最终可达集,通过最终可达集对目标物的状态进行调整。
27、一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种状态与控制受限的可达集计算方法的步骤。
28、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述一种状态与控制受限的可达集计算方法的步骤。
29、一种计算机程序产品,其特征在于,包括计算机指令,该计算机指令被处理器执行时实现所述一种状态与控制受限的可达集计算方法的步骤。
30、与现有技术相比,本发明具有以下有益效果。
31、本发明在通过充分考虑目标物的状态与控制受限,提高了目标物的安全性和可达集的精准度。在应用到实际航天器在执行复杂空间任务时,能够更加贴合实际任务需求,从而确保任务的安全性和高效性。在可达集计算过程中,本发明这种全面性的考虑使得计算结果更加贴近实际,从而提高了航天器在执行任务时的可靠性。通过精确计算实际可达集,本发明能够对目标物的状态进行精细化调整,提高了轨迹规划的效率,还使得状态调整更加精准,进一步降低任务执行过程中的风险。本发明通过对基础可达集进行优化,获取了实际可达集,并构建了最终可达集,这有助于减少航天器的能源消耗和状态调整过程中的计算耗时,提高任务执行的成功率。因此,本发明能够更好地适用于航天器的多种应用任务。无论是近距离自主交会还是行星表面着陆等复杂任务,本发明都能提供有效的支持。本发明通过精确计算实际可达集并优化轨迹规划,显著提高了航天器应用的精准度和安全性,使得航天器能够更好地完成各种复杂任务。
技术特征:1.一种状态与控制受限的可达集计算方法,其特征在于,包括:
2.根据权利要求1所述的一种状态与控制受限的可达集计算方法,其特征在于,所述确定目标物的状态与控制受限的离散线性运动模型,是根据目标物的状态约束、控制约束及运动特性获取的。
3.根据权利要求1所述的一种状态与控制受限的可达集计算方法,其特征在于,所述根据目标物的状态与控制受限的离散线性运动模型,通过凸控制代数集合采样和动力学向前传播,获取目标物的基础可达集。
4.根据权利要求3所述的一种状态与控制受限的可达集计算方法,其特征在于,所述凸控制代数集合,包括:
5.根据权利要求1所述的一种状态与控制受限的可达集计算方法,其特征在于,所述根据目标物的状态与控制受限的离散线性运动模型,获取目标物的基础可达集,具体包括:
6.根据权利要求1所述的一种状态与控制受限的可达集计算方法,其特征在于,所述对目标物的基础可达集进行优化,获取目标物的实际可达集,具体包括:
7.一种状态与控制受限的可达集计算系统,其特征在于,包括:
8.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1-6任一项所述一种状态与控制受限的可达集计算方法的步骤。
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-6任一项所述一种状态与控制受限的可达集计算方法的步骤。
10.一种计算机程序产品,其特征在于,包括计算机指令,该计算机指令被处理器执行时实现如权利要求1-6任一项所述一种状态与控制受限的可达集计算方法的步骤。
技术总结本发明公开了一种状态与控制受限的可达集计算方法及系统,属于航天工程技术领域。方法包括确定目标物的状态与控制受限的离散线性运动模型;根据目标物的状态与控制受限的离散线性运动模型,获取目标物的基础可达集;对目标物的基础可达集进行优化,获取目标物的实际可达集;通过目标物的实际可达集构建最终可达集,通过最终可达集对目标物的状态进行调整。本发明考虑了目标物的状态与控制受限情况,使得计算结果更加符合实际任务需求,并对目标物的状态进行相应调整,确保目标物在安全的前提下,完成复杂的空间任务。技术研发人员:朱战霞,唐永兴受保护的技术使用者:西北工业大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200657.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表