一种基于多级规划的智能清扫车路径规划方法及系统
- 国知局
- 2024-08-01 00:20:34
本发明属于自动驾驶领域,具体涉及一种路径规划方法的融合框架,更为具体的是针对园区智能清扫车自主作业场景下的整体路径规划算法的改进和完善,是一种基于多级规划的智能清扫车路径规划方法及系统。
背景技术:
1、智能清扫车路径规划是当前智能交通领域的研究热点之一。随着城市化进程的加快和环境保护意识的提高,清洁城市和园区成为社会发展的重要目标。而智能清扫车作为一种自动化清洁设备,具有高效、智能、环保等特点,能广泛应用于社区、工业园区、公共场所等地。然而,目前大多数城市的清扫作业中还是以半自动化清扫甚至人工清扫为主,针对智能清扫车路径规划仍存在许多挑战。首先,不同于传统的路径规划问题,智能清扫车需要考虑到特定的环境和工作要求,如避开障碍物、保持遍历清洁等。其次,智能清扫车需要能够适应不同场景和工况下的工作需求,包括低速环境、复杂地形等。此外,智能清扫车需要具备较高的路径规划精度,以确保其在实际工作中的高效性和安全性。
2、因此,研究智能清扫车路径规划具有重要的背景和意义。首先,通过深入研究智能清扫车的路径规划算法,可以提高其自主导航和避障能力,实现更高效的清扫任务,进一步减少人力资源的浪费,降低清洁成本。其次,更有效的路径规划结果可以保证其在运动过程中的稳定性和精确性,提升清洁效果和工作质量,满足城市居民对于清洁环境提出的越来越高要求。此外,智能清扫车路径规划的研究也涉及到多个学科领域的交叉,在完善清扫车辆自动化技术的同时,还对机器人等相关领域的发展和技术创新具有积极的推动作用。
3、对清扫车辆来讲,可行的路径规划算法是进行路径跟踪的前提。迄今为止,国内外许多学者在自动驾驶以及智能机器人相关领域提出了许多关于路径规划的算法,例如a*算法、人工势场算法等等。在路径搜索表现上每种算法都有各自不同的优势,但任何一种算法都未能适用于全部应用场景。在智能清扫车辆领域的多级路径规划算法更是少之又少。
技术实现思路
1、为了至少解决现有技术中存在的问题之一,本发明提供一种基于多级规划的智能清扫车路径规划方法,通过全局、全覆盖和局部路径算法间的完备规划与配合,能够有效提高路径规划的速度和轨迹质量,缩短规划得到的路径长度,提高清扫车的作业待机能力,优化各类工况环境下的鲁棒性,并应用于园区自动清洁作业的车辆系统。
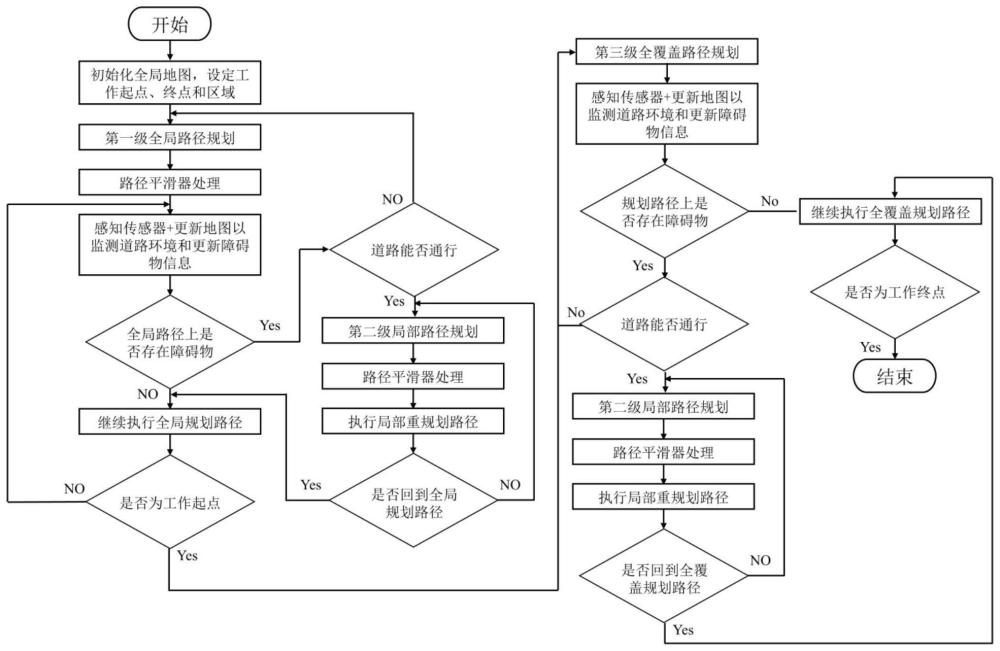
2、为了实现本发明目的,本发明提供的一种基于多级规划的智能清扫车路径规划方法,包括以下步骤:
3、初始化全局地图,设定工作起点、工作终点;
4、通过基于预处理变权重系数的动态双向a*全局路径规划算法进行路径规划,形成从出发点到工作点的全局规划路径,所述动态双向a*全局路径规划算法中增加了节点搜索方向的数量、进入路径预处理以及引入变权重系数启发函数;
5、采用基于预设区域多方向弓字型模板遍历的全覆盖路径规划算法对工作起点和工作终点之间的区域进行全覆盖路径规划,得到全覆盖路径,所述全覆盖路径规划算法中引入了预设区域的设置以及搜索死区环境下时迂回遍历并进行路道边沿运动;
6、在基于全局规划路径或基于全覆盖路径行驶时,若存在障碍物导致存在碰撞风险,则采用基于自适应动态rrt*算法的局部路径规划算法进行局部障碍物空间的路径重规划,形成无碰撞路径,在执行避开障碍物的无碰撞路径后回到原规划路径上继续行驶,所述基于自适应动态rrt*算法的局部路径规划算法能够自适应调节节点的步长、增加了偏向目标点的概率以及引入了最大转角约束;
7、若清扫工作完毕或预设的情况出现则启动基于预处理变权重系数的动态双向a*全局路径规划算法进行回溯路径规划。
8、路径预处理是指:在本文算法正式应用之前,先基于设计的算法在规定区域下利用已有的地图环境信息进行规划,并把规划的结果存储在规划模块内存中,这部分即属于路径预处理阶段。然后算法在正式应用中,则根据最新的地图(地图因为人、车、障碍物等信息会产生更新,但基础道路框架不发生改变)进行路径规划,此时如果规划结果路径点于预存的路径点存在重合部分,则直接采用预存路径,以提高行驶中的计算速度;路径碰撞检测更新则会由第二级的自适应动态rrt*局部路径规划算法实现。
9、本发明还提供一种基于多级规划的智能清扫车路径规划系统,用于实现权利前述方法,包括以下模块:
10、全局路径规划模块,用于通过基于预处理变权重系数的动态双向a*全局路径规划算法进行路径规划,形成从出发点到工作点的全局规划路径,所述动态双向a*全局路径规划算法中增加了节点搜索方向的数量、进行路径预处理以及引入了变权重系数启发函数;
11、全覆盖路径规划模块,用于采用基于预设区域多方向弓字型模板遍历的全覆盖路径规划算法对工作起点和工作终点之间的区域进行全覆盖路径规划并按全覆盖路径行驶;
12、局部路径重规划模块,用于在存在障碍物导致存在碰撞风险时,采用基于自适应动态rrt*算法的局部路径规划算法进行局部障碍物空间的路径重规划,形成无碰撞路径,所述基于自适应动态rrt*算法的局部路径规划算法能够自适应调节节点的步长、增加了偏向目标点的概率以及引入了最大转角约束。
13、进一步地,还包括路径平滑模块,用于对全局规划路径、全覆盖路径、无碰撞路径进行路径平滑。
14、与现有技术相比,本发明具有的有益效果至少如下:
15、1、通过扩展节点搜索方向,进一步扩大了搜索范围,缩短规划路径长度,提高清扫车路径执行度和平滑性,避免路径规划出现突兀连接,保证初始路径规划阶段能够生成较为平滑的路径,减小后续路径平滑器处理的复杂度。增加路径预处理和变权重系数启发函数,能够缩短全局路径规划算法的运行时间,提高路径规划效率。
16、2、采用预设区域设置清扫区域,确保智能清扫车能够覆盖到每个需要清扫的区域,避免遗漏或重复清扫,还可以根据相对规则的空间地图规划好路径进行清扫,尽量避免随机或不规律的移动,提高清扫效率。优化搜索方向设计以弥补弓字型遍历模板算法中直角转向和直线行驶在陷入死区时存在逃脱不利的情况,增强逃脱死区能力,降低大幅度转弯次数,提高清扫覆盖率。
17、3、改进基础rrt*算法的步长、偏向概率和路径突变规划问题,实现自适应动态步长、自适应目标偏向概率和路径转角约束模块,强化算法规划路径在规划长度、路径执行平顺性、随机采样节点数量以及清扫车预计转角等方面的质量。
18、4、本发明能够对清扫车整体路径规划等相关领域的发展和技术创新具有积极的推动作用。
技术特征:1.一种基于多级规划的智能清扫车路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,动态双向a*全局路径规划算法、全覆盖路径规划算法、基于自适应动态rrt*算法的局部路径规划算法在规划得到相应路径后,先对规划得到的路径进行平滑处理后,再执行路径。
3.根据权利要求1所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,动态双向a*全局路径规划算法中的所述预处理包括:首先进行一轮双向搜索,得出规划终点到已搜索节点的实际代价值,并将其存储到数组列表中,当搜索正式开始后,从正向起点和反向目标点出发,当搜索到预处理过程中已搜索过的节点时则直接使用列表中存储的实际代价值作为此时的启发函数值,无需再通过距离计算得到启发函数值。
4.根据权利要求1所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,动态双向a*全局路径规划算法中的所述变权重系数启发函数的表达式为
5.根据权利要求1所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,全覆盖路径规划算法中,是通过地图可视化编辑框选中清扫区域,利用图像灰度处理和二值化技术来设置预设区域。
6.根据权利要求1所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,基于自适应动态rrt*算法的局部路径规划算法进行自适应调节节点的步长时,通过下式来调节步长:
7.根据权利要求1所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,基于自适应动态rrt*算法的局部路径规划算法中,通过动态调整目标偏向概率以提高搜索速度,通过下式来调整目标偏向概率:
8.根据权利要求1-7任一所述的一种基于多级规划的智能清扫车路径规划方法,其特征在于,基于自适应动态rrt*算法的局部路径规划算法的所述引入了最大转角约束为,在生成新节点qnew后,通过计算新节点qnew与其父节点qnew_f以及父节点qnew_f与其父节点qnew_ff之间的连线构成的转角,将其限制在清扫车的最大转角范围内。
9.一种基于多级规划的智能清扫车路径规划系统,其特征在于,用于实现权利要求1-8任一所述的方法,包括以下模块:
10.根据权利要求9所述的一种基于多级规划的智能清扫车路径规划系统,其特征在于,还包括路径平滑模块,用于对全局规划路径、全覆盖路径、无碰撞路径进行路径平滑。
技术总结本发明提供一种基于多级规划的智能清扫车路径规划方法及系统。所述方法包括:对动态双向A*算法从搜索扩展方向和变权重系数启发函数方面进行改进,引入路径预处理过程,构建基于预处理变权重系数动态双向A*算法的全局路径规划以进行全局路径规划。提出一种基于预设区域多方向弓字型模板遍历的全覆盖路径规划算法以满足智能清扫车清洁作业的需求。在基础RRT*算法中添加自适应动态步长、目标偏向概率以及路径转角约束等优化,构建基于自适应动态RRT*算法的局部路径规划进行避开障碍物的局部路径规划。本发明能够提高清扫车规划路径的有效性和清洁任务的平稳性。技术研发人员:石柏军,梁星受保护的技术使用者:华南理工大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200679.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表