海上协同搜寻方法、系统、装置、智能设备和存储介质与流程
- 国知局
- 2024-08-01 00:21:08
本技术涉及海上搜寻,尤其涉及一种海上协同搜寻方法、系统、装置、智能设备和存储介质。
背景技术:
1、近些年来,智能设备的发展越来越快,智能设备在民生、军事中扮演着重要角色。随着人们对海洋资源的开发和利用日趋频繁,海上航运量也不断增大,海上活动呈现多元化、高密度的发展趋势,海上活动安全形势面临着严峻的挑战。海难事故不断增加,又因为海上通航环境的特殊性,海上搜寻救援工作易受到天气以及海洋环境的影响,海上搜寻救援技术的发展很重要。
2、面对海上突发搜寻任务时,同能否尽快发现落水目标,并实时展开救援,是衡量海上救援技术的重要标准之一。传统的搜寻方法是通过船队搜寻或直升机搜寻,搜寻路线主要依赖专业人员的规划,搜寻的人力、物力成本高、耗时长,搜寻工作效率低下。
3、因此,如何提升海上搜寻的效率以及搜寻结果的可靠性,并减少人力、物力成本,是当前需要考虑的问题。
技术实现思路
1、有鉴于此,本技术实施例提供了一种海上协同搜寻方法、系统、装置、智能设备和存储介质,可提升海上搜寻的效率以及搜寻结果的可靠性,并减少人力、物力成本
2、本技术实施例的第一方面提供了一种海上协同搜寻方法,应用于无人艇,所述无人艇搭载有无人机,所述方法包括:
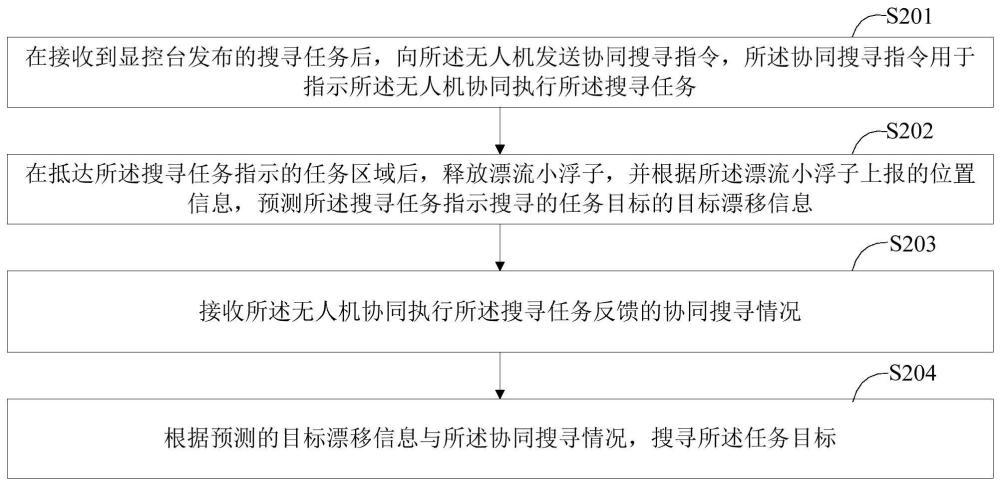
3、在接收到显控台发布的搜寻任务后,向所述无人机发送协同搜寻指令,所述协同搜寻指令用于指示所述无人机协同执行所述搜寻任务;
4、在抵达所述搜寻任务指示的任务区域后,释放漂流小浮子,并根据所述漂流小浮子上报的位置信息,预测所述搜寻任务指示搜寻的任务目标的目标漂移信息;
5、接收所述无人机协同执行所述搜寻任务反馈的协同搜寻情况;
6、根据预测的目标漂移信息与所述协同搜寻情况,搜寻所述任务目标。
7、在第一方面的一种可能的实现方式中,所述根据所述漂流小浮子上报的位置信息,预测所述搜寻任务指示搜寻的任务目标的目标漂移信息,包括:
8、按预设时间间隔收集所述漂流小浮子的位置信息;
9、根据指定时长内收集的所述漂流小浮子的位置信息,预测所述任务目标的目标漂移速度和目标漂移方位。
10、在第一方面的一种可能的实现方式中,所述根据指定时长内收集的所述漂流小浮子的位置信息,预测所述任务目标的目标漂移速度和目标漂移方位,包括:
11、根据收集的所述漂流小浮子的位置信息,确定若干个时段的漂移速度和漂移方位,所述若干个时段按所述预设时间间隔对所述指定时长划分得到;
12、据所述若干个时段的漂移速度,预测所述任务目标的目标漂移速度;
13、根据所述若干个时段的漂移方位,预测所述任务目标的目标漂移方位。
14、在第一方面的一种可能的实现方式中,所述根据预测的目标漂移信息与所述协同搜寻情况,搜寻所述任务目标,包括:
15、当所述协同搜寻情况包括可疑目标的位置信息时,根据所述可疑目标的位置信息与预测的目标漂移信息,确定所述无人艇的目标搜寻区域;
16、行驶至所述目标搜寻区域内确认所述可疑目标是否为所述搜寻任务指示的任务目标;
17、在确认所述可疑目标为所述搜寻任务指示的任务目标后,释放目标标记小浮子,所述目标标记小浮子用于实时记录并发布所述任务目标的位置信息。
18、在第一方面的一种可能的实现方式中,所述无人艇为无人艇编队的编队中心艇,所述无人艇编队还包括多架无人子艇,所述在抵达所述搜寻任务指示的任务区域后,释放漂流小浮子,包括:
19、在抵达所述搜寻任务指示的任务区域后,所述无人艇向无人子艇发送小浮子释放指令,所述小浮子释放指令用于指示所述无人子艇在所述任务区域内的指定区域释放漂流小浮子。
20、在第一方面的一种可能的实现方式中,所述向所述无人机发送协同搜寻指令,包括:
21、监测所述无人艇当前位置与所述搜寻任务指示的任务区域之间的航行距离;
22、基于所述航行距离,判断所述无人机的续航里程是否满足预设起飞条件;
23、当满足所述预设起飞条件时,向所述无人机发送协同搜寻指令。
24、本技术实施例的第二方面提供了一种海上协同搜寻系统,所述系统包括显控台、无人艇和无人机,所述无人艇搭载无人机,所述系统包括:
25、所述显控台用于向所述无人艇派发搜寻任务;
26、所述无人艇用于在接收到所述搜寻任务后,向所述无人机发送协同搜寻指令,所述协同搜寻指令用于指示所述无人机协同执行所述搜寻任务;在抵达所述搜寻任务指示的任务区域后,释放漂流小浮子,并根据所述漂流小浮子上报的位置信息,预测所述搜寻任务指示搜寻的任务目标的目标漂移信息;
27、所述无人机用于接收所述协同搜寻指令,并基于所述协同搜寻指令协同执行所述搜寻任务,并向所述无人艇反馈协同搜寻情况;
28、所述无人艇还用于接收所述无人机协同执行所述搜寻任务反馈的协同搜寻情况,根据预测的目标漂移信息与所述协同搜寻情况,搜寻所述任务目标。
29、本技术实施例的第三方面提供了一种海上协同搜寻装置,应用于无人艇,所述无人艇搭载有无人机,所述装置包括:
30、协同指令发送单元,用于在接收到显控台发布的搜寻任务后,向所述无人机发送协同搜寻指令,所述协同搜寻指令用于指示所述无人机协同执行所述搜寻任务;
31、漂移信息预测单元,用于在抵达所述搜寻任务指示的任务区域后,释放漂流小浮子,并根据所述漂流小浮子上报的位置信息,预测所述搜寻任务指示搜寻的任务目标的目标漂移信息;
32、协同情况接收单元,用于接收所述无人机协同执行所述搜寻任务反馈的协同搜寻情况;
33、任务目标搜寻单元,用于根据预测的目标漂移信息与所述协同搜寻情况,搜寻所述任务目标。
34、本技术实施例的第四方面提供了一种智能设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如本技术实施例的第一方面或第二方面提供的海上协同搜寻方法的步骤。
35、本技术实施例的第五方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如本技术实施例的第一方面或第二方面提供的海上协同搜寻方法的步骤。
36、本技术实施例的第六方面提供了一种计算机程序产品,当计算机程序产品在智能设备上运行时,使得智能设备执行本技术实施例的第一方面或第二方面所述的海上协同搜寻方法的步骤。
37、本技术实施例中,无人艇在接收到显控台发布的搜寻任务后,向搭载的无人机发送协同搜寻指令,指示所述无人机协同执行所述显控台发布的搜寻任务,在无人艇抵达所述搜寻任务指示的任务区域后,释放漂流小浮子,利用漂流小浮子提供准确的漂流信息,然后根据所述漂流小浮子上报的位置信息,预测所述搜寻任务指示搜寻的任务目标的目标漂移信息,同时,无人艇接收所述无人机协同执行所述搜寻任务反馈的协同搜寻情况,再根据预测的目标漂移信息与所述协同搜寻情况,科学缩小搜寻区域后搜寻所述任务目标,无需依赖人工规划搜寻路线,可有效提升搜寻的效率和搜寻结果的可靠性,而采用无人艇和无人机等智能设备的协同搜寻,不仅可有效减少搜寻成本,还可减少天气对搜寻的不良影响。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200724.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表