口腔清洁设备的控制方法及装置、设备、存储介质与流程
- 国知局
- 2024-07-31 17:27:30
本技术实施例涉及口腔清洁,涉及但不限于一种口腔清洁设备的控制方法及装置、设备、存储介质。
背景技术:
1、相关技术中,利用伺服电机作为动力源的口腔清洁设备在每次上电时,或者在启动前均会先微震动,然而,在实际使用的过程中,口腔清洁设备在微震后再启动运行,其微震的过程可能会使实际复位好的参考零轴位置发生改变,进而影响正常的扫震运动范围,最终影响清洁效果。
2、因此,如何提高口腔清洁设备的清洁效果,是一个亟待解决的问题。
技术实现思路
1、有鉴于此,本技术实施例提供的口腔清洁设备的控制方法及装置、设备、存储介质,能够提高口腔清洁设备的清洁效果。本技术实施例提供的口腔清洁设备的控制方法及装置、设备、存储介质是这样实现的:
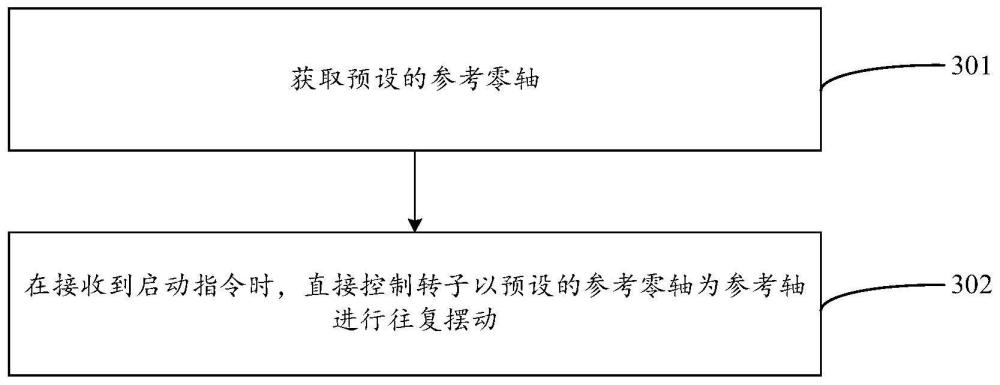
2、本技术实施例提供的口腔清洁设备的控制方法,所述口腔清洁设备包括伺服电机,所述伺服电机包括转子,所述方法包括:获取预设的参考零轴;在接收到启动指令时,直接控制所述转子以所述预设的参考零轴为参考轴进行往复摆动。
3、在一些实施例中,在所述接收到启动指令之前,所述方法还包括:在接收到唤醒指令时,判断所述转子的当前位置是否位于所述预设的参考零轴;在所述转子的当前位置未位于所述预设的参考零轴的情况下,控制所述转子转动至所述预设的参考零轴。
4、在一些实施例中,在所述口腔清洁设备接收到唤醒指令之后,且在接收到所述启动指令之前,所述方法还包括:控制所述口腔清洁设备为所述伺服电机的线圈供电,以使所述转子的位置保持在所述预设的参考零轴。
5、在一些实施例中,所述方法还包括:以预设时间间隔检测所述转子的位置是否位于所述预设的参考零轴;在所述转子的位置未位于所述预设的参考零轴的情况下,控制所述转子转动至所述预设的参考零轴。
6、在一些实施例中,所述方法还包括:若在接收到所述唤醒指令的第一预设时长内未接收到其他指令,控制所述伺服电机断电,以使所述转子停留在所述预设的参考零轴。
7、在一些实施例中,所述方法还包括:在接收到所述启动指令时,基于预设转动参数控制所述转子转动以改变所述参考轴。
8、在一些实施例中,在所述在接收到启动指令时,控制所述转子以所述预设的参考零轴为参考轴进行往复摆动之后,所述方法还包括:在接收到暂停指令时,控制所述转子的摆动频率和/或转动频率以预设规则降低,直至所述转子转动到再次以所述预设的参考零轴为参考轴时暂停工作。
9、在一些实施例中,所述口腔清洁设备包括至少一个工作模式,所述至少一个工作模式中的每个工作模式具有一一对应的工作参数,所述工作参数包括摆动参数和转动参数;所述方法还包括:在接收到模式切换指令时,控制所述口腔清洁设备以第一工作模式下当前的参考轴为参考轴,以及按照第二工作模式对应的工作参数运行,所述模式切换指令用于指示将所述口腔清洁设备当前运行的所述第一工作模式切换为所述第二工作模式。
10、在一些实施例中,所述摆动参数包括摆动幅度,所述在接收到模式切换指令时,控制所述口腔清洁设备以第一工作模式下当前的参考轴为参考轴,以及按照第二工作模式对应的工作参数运行,包括:若所述第一工作模式对应的第一摆动幅度位于所述第二工作模式对应的第二摆动幅度内,控制所述口腔清洁设备按照所述第二工作模式对应的工作参数运行;或,若所述第一摆动幅度位于所述第二摆动幅度以外,控制所述转子以预设的摆动规则降低所述第一摆动幅度,直至降低至所述第二摆动幅度以内;在所述转子当前的摆动幅度位于所述第二摆动幅度以内的情况下,控制所述口腔清洁设备按照所述第二工作模式对应的工作参数运行。
11、在一些实施例中,所述方法还包括:在接收到所述模式切换指令时,控制所述口腔清洁设备以所述第一工作模式对应的工作参数运行,直至所述转子转动到再次以所述预设的参考零轴为参考轴时,按照所述第二工作模式对应的工作参数运行。
12、在一些实施例中,所述每个工作模式具有一一对应的预设工作时长,所述方法还包括:在接收到所述模式切换指令,且在所述第一工作模式的运行时长小于第二预设时长的情况下,控制所述口腔清洁设备在切换至所述第二工作模式后开始计时,且在所述计时达到所述第二工作模式对应的预设工作时长时停止运行;或,在接收到所述模式切换指令,且在所述第一工作模式的运行时长大于第三预设时长的情况下,控制所述口腔清洁设备统计所述第一工作模式的第一运行时间和所述第二工作模式的第二运行时间,所述第三预设时长大于所述第二预设时长;控制所述口腔清洁设备在所述第一运行时间与所述第二运行时间的和达到所述第二工作模式对应的预设工作时长时停止运行。
13、在一些实施例中,所述至少一个工作模式包括智能工作模式,所述口腔清洁设备中还包括位置检测模块,所述位置检测模块用于检测至少两个牙区;所述方法还包括:在所述口腔清洁设备处于所述智能工作模式的情况下,控制所述位置检测模块检测所述口腔清洁设备的清洁组件当前所处的牙区;根据预设的不同牙区与清洁模式的映射关系,确定与所述当前所处的牙区对应的目标清洁模式,所述清洁模式包括所述至少一个工作模式中除所述智能工作模式以外的其他工作模式;控制所述口腔清洁设备以所述目标清洁模式运行。
14、在一些实施例中,所述方法还包括:在所述口腔清洁设备在所述当前所处的牙区运行达到第四预设时长,或所述口腔清洁设备的当前运行总时长达到第五预设时长的情况下,输出提示信息,所述提示信息用于提醒用户切换牙区。
15、在一些实施例中,所述提示信息包括变频和暂停运行第六预设时长中的至少一种。
16、在一些实施例中,所述方法还包括:在所述口腔清洁设备的工作过程中,若接收到外力使得所述转子无法复位至所述预设的参考零轴的情况下,在所述外力撤销时控制所述转子复位至所述预设的参考零轴,并按照接收所述外力之前的工作参数运行。
17、在一些实施例中,所述方法还包括:获取所述口腔清洁设备当前运行的工作模式;在所述口腔清洁设备当前的运行时长达到与所述当前运行的工作模式对应的预设工作时长的情况下,控制所述口腔清洁设备停止运行,且所述转子停止在所述预设的参考零轴。
18、在一些实施例中,所述方法还包括:在所述口腔清洁设备当前的运行时长达到与所述当前运行的工作模式对应的预设工作时长,且所述转子不位于所述预设的参考零轴的情况下,控制所述转子转至所述预设的参考零轴并停止运行,或控制所述口腔清洁设备继续运行,直至所述转子转至所述预设的参考零轴后停止运行。
19、本技术实施例提供的口腔清洁设备的控制装置,所述口腔清洁设备包括伺服电机,所述伺服电机包括转子,所述装置包括:获取模块,用于获取预设的参考零轴;控制模块,用于在接收到启动指令时,直接控制所述转子以所述预设的参考零轴为参考轴进行往复摆动。
20、本技术实施例提供的计算机设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本技术实施例所述的方法。
21、本技术实施例提供的计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现本技术实施例提供的所述的方法。
22、本技术实施例提供的计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现本技术实施例提供的所述的方法。
23、本技术实施例所提供的口腔清洁设备的控制方法及装置、设备、存储介质中,口腔清洁设备在接收到启动指令时,直接控制转子以预设的参考零轴为参考轴进行往复摆动,无需震动反馈,可以有效避免口腔清洁设备在启动时实际的参考轴发生改变,进而提高口腔清洁设备的清洁效果,解决背景技术中所提出的技术问题。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175589.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表