一种用于城市交通路口车辆运动轨迹仿真方法
- 国知局
- 2024-07-31 20:36:29
本发明属于计算机,涉及仿真方法,尤其涉及一种车辆运动轨迹仿真方法。
背景技术:
1、城市路口处的车辆运动轨迹仿真,是指通过建模车辆受道路结构、行人以及其周围车辆的影响,从而计算得到在设定条件下车辆运动轨迹的技术。车辆轨迹仿真对影视动画、自动驾驶、城市道路规划等应用有着重要的研究意义和使用价值。城市路口结构多样,车辆行人交互影响,因而车辆的运动轨迹较为复杂,如何逼真地再现城市路口车辆的运动轨迹是一个重要研究方向。
2、车辆运动轨迹仿真方法可分为基于规则的方法与基于数据驱动的方法。基于规则的方法需要设定车辆运动模型,通过增加路口处其他车辆的位置速度等因素实现在路口处的车辆运动仿真。其中,车辆运动模型主要包括跟驰模型与换道模型,跟驰模型计算车辆维持车道的情况下的速度变化,换道模型进行换道决策和换道实现。基于数据驱动的方法具有与基于规则的方法相似的框架,只不过将基于规则的方法中的人工设计函数替换为机器学习模型,从而达到更高的仿真精度。
3、城市道路路口的环境较为复杂,不能像高速公路场景中那样被视为平坦直路。在路口建模车辆轨迹时,需要考虑来自不同方向的行人和其他车辆的影响,许多现有方法在对交叉口车辆运动轨迹建模时往往采用过于简化的方式。例如,有著名交通仿真器假设车辆严格遵循预定车道和车跟随规则。然而与实际的路口交通模式相比,基于规则的方法模拟出的轨迹往往缺乏真实感。数据驱动的仿真方法目前没有能够统一建模多样路口的解决方案,依赖于专门针对特定的路口进行建模。
4、因此,概括说来,现有的车辆运动轨迹仿真方法在城市路口场景下车辆运动轨迹的生成上有以下的问题:城市路口道路结构多样,这就导致不同于道路内部,车辆的运动方向更多,与其他车辆行人的交互更加复杂,基于规则的车辆轨迹仿真方法需要专门针对每种不同的交互形式设计相应的规则。而现有的基于数据驱动的方法基本都是针对道路内的换道和跟驰行为进行建模,缺少统一建模的方法,对于多样的道路结构内与行人车辆交互的运动轨迹的仿真研究较少。
技术实现思路
1、因此,本发明的目的在于克服上述现有技术的缺陷,提供一种用于车辆运动轨迹仿真的深度神经网络,一种用于车辆运动轨迹仿真的深度神经网络训练方法,以及一种根据所述训练方法所生成的深度神经网络仿真车辆运动轨迹的方法。
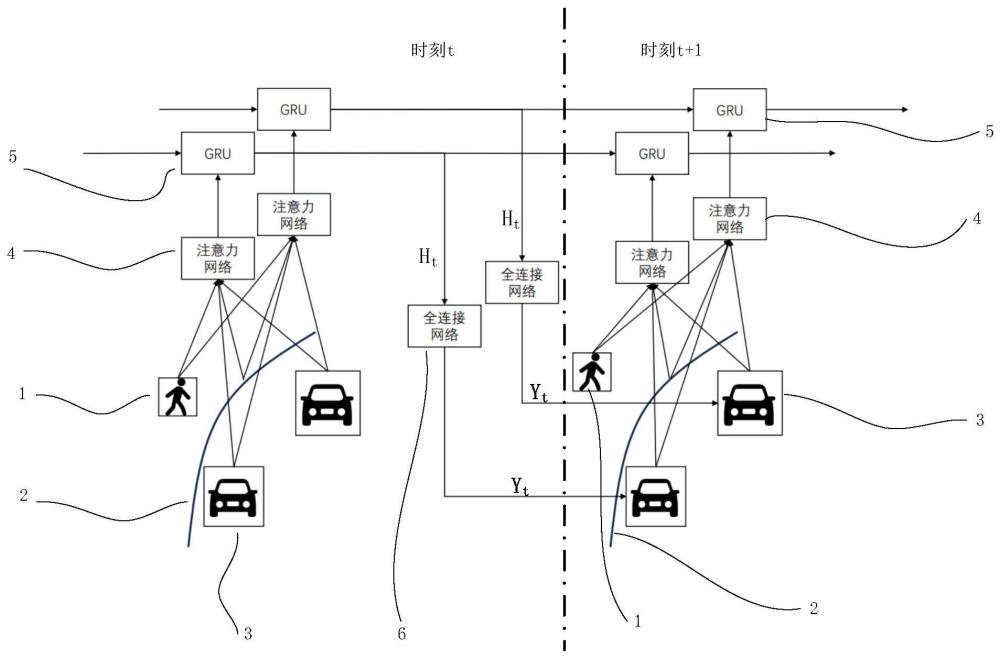
2、根据本发明的第一方面,提供一种用于车辆运动轨迹仿真的深度神经网络,其中车辆运动轨迹以不同时刻车辆的位置表示,所述深度神经网络包括注意力网络,循环神经网络和全连接神经网络,并且:
3、注意力网络,用于从交通要素中提取空间特征,其中所述交通要素包括车道线,车辆和行人,所述车道线,车辆和行人以向量表示;
4、循环神经网络,用于根据所述空间特征和循环神经网络所提取的前一时刻的状态提取当前时刻的状态;
5、全连接神经网络,用于根据当前时刻的状态计算下一时刻车辆的位置与速度。
6、根据本发明的一个实施例,所述交通要素通过在交通场景建立坐标系,将交通要素在所建立的坐标系中用向量表示。
7、根据本发明的一个实施例,所述车道线向量包括车道线线段起点坐标,终点坐标,车道线类别标识的向量表示的车道线线段。
8、根据本发明的一个实施例,所述车辆和行人的向量包括车辆和行人的起点坐标,速度,引导点坐标,以及表示车辆或行人的类别标识,其中,引导点代表车辆在距离当前时刻预设时间段之后想要到达的位置。
9、根据本发明的一个实施例,所述坐标系为以场景道路所在平面的正中心为原点建立的平面笛卡尔坐标系。
10、根据本发明的一个实施例,所述交通场景为城镇路口。
11、根据本发明的一个实施例,所述注意力网络包括:行人数据映射模块、车道线数据映射模块、车辆数据映射模块,以及空间编码模块;其中,行人数据映射模块、车道线数据映射模块、车辆数据映射模块分别将行人数据、车道线数据和车辆数据映射到相同维度,空间编码模块用于从映射后的行人数据、车道线数据和车辆数据中提取空间特征。
12、根据本发明的一个实施例,所述空间编码模块由多个结构相同的注意力层堆叠而成。
13、根据本发明的一个实施例,所述注意力层包括依次连接的多头注意力模块,第一正则化&残差模块,全连接网络模块,第二正则化&残差模块。
14、根据本发明的第二方面,提供一种用于上述任一深度神经网络的训练方法,包括以下步骤:
15、s1:从交通要素数据中提取空间特征,所述交通要素数据来自交通历史数据样本,并分别用向量表示;
16、s2:根据提取的空间特征和前一时刻的状态计算出当前时刻的状态;
17、s3:根据当前时刻的状态计算车辆的位置与速度,并更新车辆数据;
18、s4:用计算出的车辆位置和速度与从样本数据中的车辆位置和速度计算损失,并通过优化算法更新深度神经网络参数;
19、s5:重复步骤s1-s4直到预定时长的数据全部输入模型并计算完毕;
20、s6:重复步骤s1-s5预定次数。
21、根据本发明的第三方面,提供一种基于本发明第二方面所述训练方法生成的深度神经网络来仿真车辆运动轨迹的方法,包括以下步骤:
22、s10:从当前时刻的向量化表示的交通要素数据中提取空间特征;
23、s20:根据提取的空间特征和前一时刻的状态计算出当前时刻的状态;
24、s30:根据当前时刻的状态计算车辆的位置与速度,并更新车辆数据;
25、s40:重复步骤s10-s30直到预定时长的数据全部输入模型并计算完毕。
26、与现有技术相比,本发明的优点在于:将交通要素向量化表达与深度神经网络相结合用于各种类型的城市路口交通场景下车辆运动轨迹的仿真,相比于现有的仿真方法跨场景能力和仿真准确率都有着明显的提升。并且对于比城市路口相对简单的交通场景同样适用。
技术特征:1.一种用于车辆运动轨迹仿真的深度神经网络,其中车辆运动轨迹以不同时刻车辆的位置表示,所述深度神经网络包括注意力网络,循环神经网络和全连接神经网络,并且:
2.根据权利要求1所述的用于车辆运动轨迹仿真的深度神经网络,所述交通要素通过在交通场景建立坐标系,将交通要素在所建立的坐标系中用向量表示。
3.根据权利要求2所述的用于车辆运动轨迹仿真的深度神经网络,所述车道线向量包括车道线线段起点坐标,终点坐标,车道线类别标识的向量表示的车道线线段。
4.根据权利要求2所述的用于车辆运动轨迹仿真的深度神经网络,所述车辆和行人的向量包括车辆和行人的起点坐标,速度,引导点坐标,以及表示车辆或行人的类别标识,其中,引导点代表车辆在距离当前时刻预设时间段之后想要到达的位置。
5.根据权利要求2-4所述的用于车辆运动轨迹仿真的深度神经网络,所述坐标系为以场景道路所在平面的正中心为原点建立的平面笛卡尔坐标系。
6.根据权利要求2-4所述的用于车辆运动轨迹仿真的深度神经网络,所述交通场景为城镇路口。
7.根据权利要求1-4所述的用于车辆运动轨迹仿真的深度神经网络,所述注意力网络包括:行人数据映射模块、车道线数据映射模块、车辆数据映射模块,以及空间编码模块;其中,行人数据映射模块、车道线数据映射模块、车辆数据映射模块分别将行人数据、车道线数据和车辆数据映射到相同维度,空间编码模块用于从映射后的行人数据、车道线数据和车辆数据中提取空间特征。
8.根据权利要求7所述的用于车辆运动轨迹仿真的深度神经网络,所述空间编码模块由多个结构相同的注意力层堆叠而成。
9.根据权利要求8所述的用于车辆运动轨迹仿真的深度神经网络,所述注意力层包括依次连接的多头注意力模块,第一正则化&残差模块,全连接网络模块,第二正则化&残差模块。
10.一种用于权利要求1-9之一的用于车辆运动轨迹仿真的深度神经网络训练方法,包括以下步骤:
11.一种用于权利要求10训练生成的深度神经网络仿真车辆运动轨迹的方法,包括以下步骤:
技术总结本发明提供一种用于车辆运动轨迹仿真的深度神经网络,其中车辆运动轨迹以不同时刻车辆的位置表示,深度神经网络包括注意力网络,循环神经网络和全连接神经网络,并且:注意力网络,用于从交通要素中提取空间特征,其中所述交通要素包括车道线,车辆和行人,所述车道线,车辆和行人以向量表示;循环神经网络,用于根据所述空间特征和循环神经网络所提取的前一时刻的状态提取当前时刻的状态;全连接神经网络,用于根据当前时刻的状态计算下一时刻车辆的位置与速度。本发明的深度神经网络相比于现有的车辆运动轨迹仿真的深度神经网络跨场景能力和仿真准确率都有着明显的提升。并且对于比城市路口相对简单的交通场景同样适用。技术研发人员:毛天露,刘京尧,王兆其,毕慧堃受保护的技术使用者:中国科学院计算技术研究所技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240731/187073.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表