车辆环景影像的处理方法、车辆环景系统及车载处理装置与流程
- 国知局
- 2024-07-31 20:42:22
本发明是有关于一种环景影像的处理方法、环景系统及处理装置,且特别是有关于一种车辆环景影像的处理方法、车辆环景系统及车载处理装置。
背景技术:
1、随着科技的发展,许多车辆为了停车与行驶的安全性,设置了车辆环景系统,以取得车辆四周围的车辆环景影像。车辆环景影像可以通过数台相机所拍摄的多张影像进行缝合而获得。
2、然而,目前车辆环景系统所获得的车辆环景影像经常会有物件消失或多重显示鬼影的情况。举例来说,车辆环景影像可能会没有显示出某一物件。或者,车辆环景影像可能会出现同一物件的两个残影。这些情况可能会造成驾驶在停车上的困扰,严重时可能会影响行驶上的安全性。因此,研究人员正致力于改善车辆环景系统,以提供更优越的车辆环景影像。
技术实现思路
1、本发明是有关于一种车辆环景影像的处理方法、车辆环景系统及车载处理装置,其在缝合多张车外影像以生成车辆环景影像的过程中,适应性的考虑前景物件的位置及取像来源,以使人物(或物体)不会部分消失且不会产生多重显示鬼影。
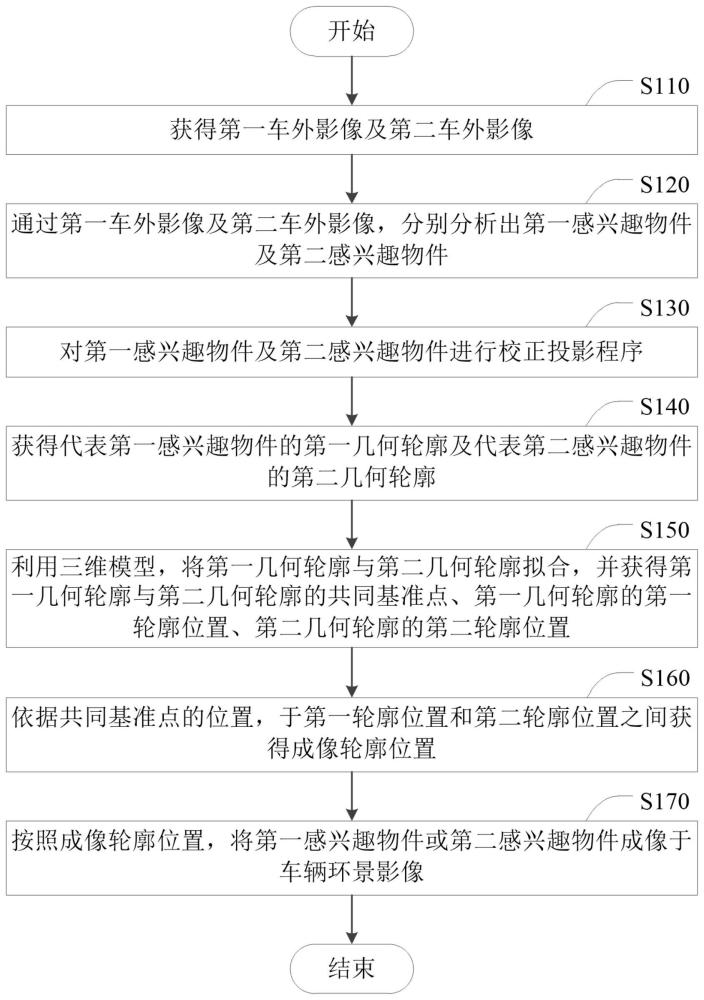
2、根据本发明的一方面,提出一种车辆环景影像的处理方法。车辆环景影像的处理方法包括以下步骤。获得一第一车外影像及一第二车外影像。第一车外影像之一第一取像范围不同于第二车外影像之一第二取像范围。于第一车外影像及第二车外影像,分别分析出一第一感兴趣物件及一第二感兴趣物件。第一感兴趣物件及第二感兴趣物件对应于同一实体物件。于第一车外影像及第二车外影像,分别获得代表第一感兴趣物件的一第一几何轮廓及代表第二感兴趣物件的一第二几何轮廓。利用一三维模型,将第一几何轮廓及第二几何轮廓拟合,并获得第一几何轮廓及第二几何轮廓的一共同基准点、第一几何轮廓的一第一轮廓位置、及第二几何轮廓的一第二轮廓位置。依据共同基准点的位置,于第一轮廓位置及第二轮廓位置之间获得一成像轮廓位置。按照成像轮廓位置,将第一感兴趣物件或第二感兴趣物件成像于一车辆环景影像。
3、根据本发明的另一方面,提出一种车辆环景系统。车辆环景系统包括一第一相机、一第二相机及一车载处理装置。第一相机用于获得一第一车外影像,第一相机具有一第一取像范围。第二相机用于获得一第二车外影像。第二相机具有一第二取像范围。第一取像范围不同于第二取像范围。车载处理装置包括一物件切割单元、一几何轮廓分析单元、一拟合单元、一位置分析单元及一成像单元。物件切割单元用于于第一车外影像及第二车外影像,分别分析出一第一感兴趣物件及一第二感兴趣物件。第一感兴趣物件及第二感兴趣物件对应于同一实体物件。几何轮廓分析单元用于于第一车外影像及第二车外影像,分别获得代表第一感兴趣物件的一第一几何轮廓及代表第二感兴趣物件的一第二几何轮廓。拟合单元用于利用一三维模型,将第一几何轮廓及第二几何轮廓拟合,并获得第一几何轮廓及一第二几何轮廓的一共同基准点、第一几何轮廓的一第一轮廓位置、及第二几何轮廓的一第二轮廓位置。位置分析单元用于依据共同基准点的位置,于第一轮廓位置及第二轮廓位置之间获得一成像轮廓位置。成像单元用于按照成像轮廓位置,将第一感兴趣物件或第二感兴趣物件成像于一车辆环景影像。
4、根据本发明的再一方面,提出一种车载处理装置。车载处理装置包括一物件切割单元、一几何轮廓分析单元、一拟合单元、一位置分析单元及一成像单元。物件切割单元用于于一第一车外影像及一第二车外影像,分别分析出一第一感兴趣物件及一第二感兴趣物件。第一车外影像的一第一取像范围不同于第二车外影像的一第二取像范围。第一感兴趣物件及第二感兴趣物件对应于同一实体物件。几何轮廓分析单元用于于第一车外影像及第二车外影像,分别获得代表第一感兴趣物件的一第一几何轮廓及代表第二感兴趣物件的一第二几何轮廓。拟合单元用于利用一三维模型,将第一几何轮廓及第二几何轮廓拟合,并获得第一几何轮廓及第二几何轮廓的一共同基准点、第一几何轮廓的一第一轮廓位置、及第二几何轮廓的一第二轮廓位置。位置分析单元用于依据共同基准点的位置,于第一轮廓位置及第二轮廓位置之间获得一成像轮廓位置。成像单元用于按照成像轮廓位置,将第一感兴趣物件或第二感兴趣物件成像于一车辆环景影像。
技术特征:1.一种车辆环景影像的处理方法,其特征在于,该处理方法包括:
2.如权利要求1所述的车辆环景影像的处理方法,其特征在于,该第一取像范围与该第二取像范围部分重叠。
3.如权利要求1所述的车辆环景影像的处理方法,其特征在于,该第一感兴趣物件及该第二感兴趣物件通过一人工智能模型获得。
4.如权利要求1所述的车辆环景影像的处理方法,其特征在于,该第一几何轮廓和该第二几何轮廓为椭圆、圆形、多边形或物件轮廓。
5.如权利要求1所述的车辆环景影像的处理方法,其特征在于,该共同基准点为该第一几何轮廓及该第二几何轮廓距离该三维模型的中心的最近点。
6.如权利要求1所述的车辆环景影像的处理方法,其特征在于,该第一取像范围与该第二取像范围具有一重叠范围,该第一轮廓位置及该第二轮廓位置分别以一第一权重及一第二权重进行加权计算,以获得该成像轮廓位置,该第一权重和该第二权重与该共同基准点在该重叠范围的位置相关。
7.如权利要求6所述的车辆环景影像的处理方法,其特征在于,该重叠范围具有一中心线、一第一边界及一第二边界,该第一边界为该第二取像范围的边缘,该第二边界为该第一取像范围的边缘,该第一权重正比于该共同基准点靠近该第一边界的程度,该第二权重正比于该共同基准点靠近该第二边界的程度。
8.如权利要求7所述的车辆环景影像的处理方法,其特征在于,
9.如权利要求1所述的车辆环景影像的处理方法,其特征在于,还包括:
10.如权利要求1所述的车辆环景影像的处理方法,其特征在于,该第一轮廓位置与该第二轮廓位置为旋转角度位置关系或平移位置关系。
11.一种车辆环景系统,其特征在于,该车辆环景系统包括:
12.如权利要求11所述的车辆环景系统,其特征在于,该第一取像范围与该第二取像范围部分重叠。
13.如权利要求11所述的车辆环景系统,其特征在于,该物件切割单元通过一人工智能模型获得该第一感兴趣物件及该第二感兴趣物件。
14.如权利要求11所述的车辆环景系统,其特征在于,该几何轮廓分析单元以椭圆、圆形、多边形或物件轮廓找出该第一几何轮廓与该第二几何轮廓。
15.如权利要求11所述的车辆环景系统,其特征在于,该拟合单元以该第一几何轮廓及该第二几何轮廓距离该三维模型的中心的最近点作为该共同基准点。
16.如权利要求11所述的车辆环景系统,其特征在于,该第一取像范围与该第二取像范围具有一重叠范围,该位置分析单元分别以一第一权重及一第二权重对该第一轮廓位置及该第二轮廓位置进行加权计算,以获得该成像轮廓位置,该第一权重与该第二权重与该共同基准点在该重叠范围的位置相关。
17.如权利要求16所述的车辆环景系统,其特征在于,该重叠范围具有一中心线、一第一边界及一第二边界,该第一边界为该第二取像范围的边缘,该第二边界为该第一取像范围的边缘,该位置分析单元设定该第一权重正比于该共同基准点靠近该第一边界的程度,该位置分析单元设定该第二权重正比于该共同基准点靠近该第二边界的程度。
18.如权利要求17所述的车辆环景系统,其特征在于,
19.如权利要求11所述的车辆环景系统,其特征在于,该车载处理装置还包括:
20.如权利要求11所述的车辆环景系统,其特征在于,该第一轮廓位置与该第二轮廓位置为旋转角度位置关系或平移位置关系。
21.一种车载处理装置,其特征在于,该车载处理装置包括:
技术总结一种车辆环景影像的处理方法、车辆环景系统及车载处理装置。该处理方法包括:获得第一车外影像及第二车外影像。第一车外影像与第二车外影像具有不同的取像范围。于第一车外影像及第二车外影像,分别分析出对应于同一实体物件的第一感兴趣物件和第二感兴趣物件。分别获得代表第一感兴趣物件的第一几何轮廓及代表第二感兴趣物件的第二几何轮廓。将第一几何轮廓与第二几何轮廓拟合,并获得第一几何轮廓与第二几何轮廓的共同基准点、第一几何轮廓的第一轮廓位置、及第二几何轮廓的第二轮廓位置。依据共同基准点的位置,于第一轮廓位置和第二轮廓位置之间获得成像轮廓位置。按照成像轮廓位置,将第一感兴趣物件或第二感兴趣物件成像于车辆环景影像。技术研发人员:陈彦均,陈俊雄,李建忠,翁啟珉,许纯宁受保护的技术使用者:光宝科技股份有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240731/187508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
前方车辆的盲区预警系统
下一篇
返回列表