基于车辆识别的停车场照明智能引导方法及系统与流程
- 国知局
- 2024-07-31 21:06:35
本发明涉及停车场灯光引导,具体为基于车辆识别的停车场照明智能引导方法及系统。
背景技术:
1、停车场灯光引导技术,是指一种利用灯光系统来指导和引导驾驶员在停车场内正确停放车辆的技术,它通过合理布置和控制灯光,为驾驶员提供明确的指示和方向,以便他们能够快速、有效地找到可用的停车位并安全停放车辆。
2、现有的停车场灯光引导技术通常都是在停车场内各个分岔口显示不同方向上的空余车位对车辆进行引导,或是通过屏幕显示的方式为车辆显示空余车位的位置,但需要车辆自行规划路线前往,而在前往停车位的路程中,不同的路径上可能存在不同数量的车辆,部分车辆准备停车,部分车辆准备驶离停车场,这会导致新进入的车辆被前车挡住的情况,进而使得车辆需要更多的时间到达空车位,比如在申请公开号为cn111243329a的中国专利中,公开了一种停车场引导灯系统及使用方法,该方案就是通过车位诱导屏为车辆提供空车位的位置对车辆进行引导,此方法需要车辆自行规划路线前往,且车辆难以预测前方路径上待停车辆以及待出车辆的数量,导致车辆需要花费更多时间进行停车。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的技术问题之一,通过为停车场内的车辆进行标记,划分为待停车辆、已停车辆以及待出车辆,再对停车场内的行车道进行编号,将停车场划分为网格状的寻路分析图,再基于寻路分析图为待停车辆查找可行路径,基于多条可行路径计算最佳路径并通过指示灯对待停车辆进行引导,以解决现有的停车场引导技术还存在对车辆的引导不够智能以及没有为车辆规划路径,导致车辆需要花费更多时间进行停车的问题。
2、为实现上述目的,第一方面,本技术提供基于车辆识别的停车场照明智能引导方法,包括如下步骤:
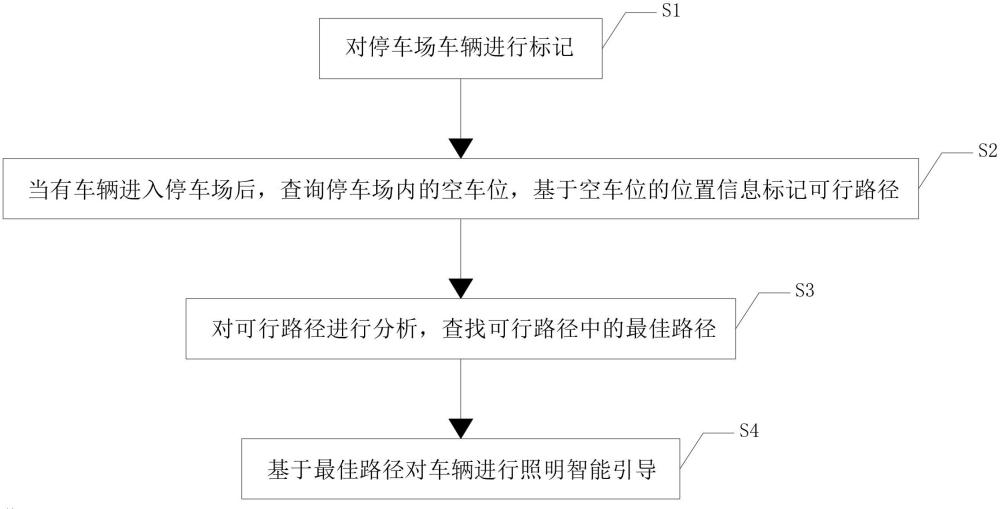
3、对停车场车辆进行标记;
4、当有车辆进入停车场后,查询停车场内的空车位,基于空车位的位置信息标记可行路径;
5、对可行路径进行分析,查找可行路径中的最佳路径;
6、基于最佳路径对车辆进行照明智能引导。
7、进一步地,对停车场车辆进行标记包括如下子步骤:
8、当停车场入口扫描到有车辆准备进入停车场时,将车辆标记为待停车辆;
9、通过雷达扫描显示不同的车辆在停车场中的位置信息;
10、将待停车辆停入停车位后,将其标记为已停车辆;
11、当已停车辆驶离停车位后,将其标记为待出车辆。
12、进一步地,当有车辆进入停车场后,查询停车场内的空车位,基于空车位的位置信息标记可行路径包括如下子步骤:
13、获取停车场地图,对停车场地图中的行车道进行编号,得到车道编号;
14、构建寻路分析图,将车道编号录入寻路分析图;
15、当待停车辆进入停车场后,基于空车位以及寻路分析图查找可行路径。
16、进一步地,获取停车场地图,对停车场地图中的行车道进行编号,得到车道编号包括如下子步骤:
17、所述车道编号为rn,n为车道编号的序号且n为正整数;
18、将停车场内行车道中的分岔口标记为未标记分岔口;从停车场入口开始,将停车场入口与下一个未标记分岔口之间的行车道标记为r1,同时将此未标记分岔口标记为待标记分岔口;
19、获取与待标记分岔口直接相连的未标记分岔口,标记为相连分岔口;
20、将待标记分岔口与相连分岔口之间的行车道标记为待标记车道,将车道长度最小的行车道标记为rn+1,再将n加一并继续进行分析,直至标记完全部行车道为止;
21、建立车位数据库,将行车道两侧的停车位的车位号编入对应的车道编号的目录下。
22、进一步地,构建寻路分析图,将车道编号录入寻路分析图包括如下子步骤:
23、构建由第一数量乘第一数量个小正方形组成的大正方形的网格图,命名为寻路分析图;
24、将寻路分析图的几何中心对应的小正方形标记为起始点,将r1填充进起始点;
25、按照行车道的布局将车道编号录入寻路分析图,将寻路分析图中未填充车道编号的小正方形剔除。
26、进一步地,当待停车辆进入停车场后,基于空车位以及寻路分析图查找可行路径包括如下子步骤:
27、将寻路分析图中剩余的小正方形标记为路径点;
28、查找停车场内的空车位对应的车位号,标记为空位号;
29、查找空位号对应的车道编号,标记为可停编号;
30、以r1为起始点,将与r1相邻的路径点标记为第一路径格,将与第一路径格相邻的路径点标记为第二路径格,将与第m路径格相邻的路径点标记为第m+1路径格,m为正整数,若第m+1路径格对应的路径点为可停编号,则将第m+1路径格标记为目标路径格,同时将对应的m+1标记为号码值;
31、将目标路径格的数量标记为目标数量,将目标数量与第一目标数阈值进行比对,若目标数量小于第一目标数阈值,则输出继续查找信号;若目标数量大于等于第一目标数阈值,则输出停止查找信号;
32、若输出继续查找信号,则继续将与第m路径格相邻的路径点标记为第m+1路径格以查找新的目标路径格;若输出停止查找信号,则停止查找目标路径格;
33、对不同的目标路径格进行进一步分析,得到可行路径。
34、进一步地,对不同的目标路径格进行进一步分析包括如下子步骤:
35、针对任意目标路径格,获取目标路径格对应的号码值,通过符号g表示,g为正整数;
36、以第g路径格为起始,反向查找第g-1路径格,循环查找,直至第g-1路径格为第一路径格为止;
37、将查找所经过的所有的第g路径格整合为一条可行路径;
38、对所有目标路径格进行分析,得到不同的可行路径。
39、进一步地,对可行路径进行分析,查找可行路径中的最佳路径包括如下子步骤:
40、针对任意可行路径,获取可行路径中包含的路径点对应的车道编号,标记为路径编号;
41、查询车道参数数据库,获取路径编号对应的行车道的长度,标记为车道长度,将所有车道长度相加得到路径长度;
42、检测可行路径上待停车辆以及待出车辆的数量,分别标记为待停数以及待出数;
43、通过路径优先度计算公式对路径长度、待停数以及待出数进行计算,得到可行路径的路径优先度;
44、计算所有可行路径的路径优先度,查找路径优先度中的最大值,标记为最大优先度,将最大优先度对应的可行路径标记为最佳路径。
45、进一步地,基于最佳路径对车辆进行照明智能引导包括如下子步骤:
46、将最佳路径所对应的空车位标记为待停车位,待停车位不再参与目标路径格的查找;
47、将待停车位的车位灯调整至高亮;
48、在每个分岔口设置指示灯,按照最佳路径为待停车辆亮起指示灯;
49、在待停车辆按照指示灯的引导每驶过一个指示灯时同步关闭该指示灯;
50、在待停车辆停入待停车位后关闭车位灯的高亮状态。
51、第二方面,本技术提供基于车辆识别的停车场照明智能引导系统,包括车辆标记模块、可行路径查询模块、最佳路径选取模块以及路径引导模块;所述车辆标记模块、可行路径查询模块以及路径引导模块分别与最佳路径选取模块数据连接;
52、所述车辆标记模块用于对停车场车辆进行标记;
53、所述可行路径查询模块用于当有车辆进入停车场后,查询停车场内的空车位,基于空车位的位置信息标记可行路径;
54、所述最佳路径选取模块用于对可行路径进行分析,查找可行路径中的最佳路径;
55、所述路径引导模块用于基于最佳路径对车辆进行照明智能引导。
56、本发明的有益效果:本发明通过对停车场内的行车道进行编号,再将车道编号转换为寻路分析图,优势在于,寻路分析图可以便于可行路径的查找,同时为车辆挑选距离最近的若干个停车位,提高了车辆停车的便捷性以及车辆停车的效率;
57、本发明通过将停车场内的车辆划分为待停车辆、已停车辆以及待出车辆,再对可行路径进行分析,结合可行路径的路径长度以及可行路径上待停车辆以及待出车辆的数量进行分析计算,得到可行路径的路径优先度,基于路径优先度选取最佳路径为待停车辆进行引导,优势在于,在为待停车辆的停车路径规划中充分考虑了所有可控变量的影响,由此选出的最佳路径可以帮助待停车辆更快的到达空车位,提高了车辆停车的效率以及照明引导的智能性;
58、本发明通过将待停车位的车位灯调整至高亮,并在每个分岔口设置指示灯,按照最佳路径为待停车辆亮起指示灯,同时在待停车辆按照指示灯的引导每驶过一个指示灯时同步关闭该指示灯,优势在于,将待停车位显示为高亮可以让待停车辆一目了然的知晓待停车辆的位置,同时亮起最佳路径上的指示灯让车辆提前知晓路径,在通过一个指示灯后及时熄灭以免对后车产生误导,同时可以更快的为后车提供引导,进一步提高了车辆停车的便捷性以及照明引导的智能性。
59、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188399.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表