一种城市交通路网交通中断预测方法
- 国知局
- 2024-07-31 21:21:02
本发明属于智能交通与机器学习领域,尤其涉及一种城市交通路网交通中断预测方法。
背景技术:
1、
2、随着计算机科学的飞速发展,利用智能交通系统对城市交通路网实况进行分析预测引起了广泛关注。各种机器学习算法逐渐被用于分析从系统中获得的交通记录数据,目前使用的机器学习预测方法大多分为基于时间序列的预测方法和基于图表示模型的预测方法这两大类。基于时间序列的预测方法是利用过去观测到的监测数据记录构成的时间序列来预测未来的发展趋势或潜在事故风险的一种方法,近年来以循环神经网络为代表的基于深度学习的时间序列预测模型在这方面工作中取得了优秀的表现。此外,基于回归模型的预测方法也属于这一类别,包括多元回归分析和非线性回归模型两种。多元线性回归分析是通过选择区域人口总数、机动车总量、非机动车总量和驾驶员总量等多项变量来建立多元线性回归分析预测模型,并根据建立的方程组得出各个线性回归系数,进而进行模型的检验。非线性回归模型利用非线性回归方法将人均 gdp、经济增长率、时间因素、工程因素以及机动化水平确定为宏观交通安全的影响因素,基于时间序列的预测方法选择指标全面,能涵盖道路交通安全中的大部分相关因素。基于图表示模型的预测方法,则是利用城市道路拓扑与过往监测数据组成的时间序列。这一方法,考虑到时间序列间的空间关联,从时空两方面把握数据关联。这两类方法都是较为成熟的方法。
3、然而,这两种模型都有着不足存在。基于时间序列的预测模型忽略了路网结构拓扑等因素的影响,并假设观察到的时间序列周期性地重复,处理长期时间依赖的效果较差。基于图表示模型的预测方法不能处理多源数据,无法利用丰富的外部信息。因此,急需一种新的预测模型,能够利用多类型数据,并结合道路空间拓扑,对城市交通路网交通中断做更为准确的预测。
技术实现思路
1、本发明技术解决问题:针对城市交通路网交通中断预测领域现有的预测方法预测准确率低、多模态数据利用不充分的问题。该发明的方法可以提高对城市交通路网交通中断预测的准确率,以及预测值与真实值的相关系数,使得预测结果更加贴近实际情况。
2、本发明提出一种城市交通路网交通中断预测方法,所述方法包括以下步骤:
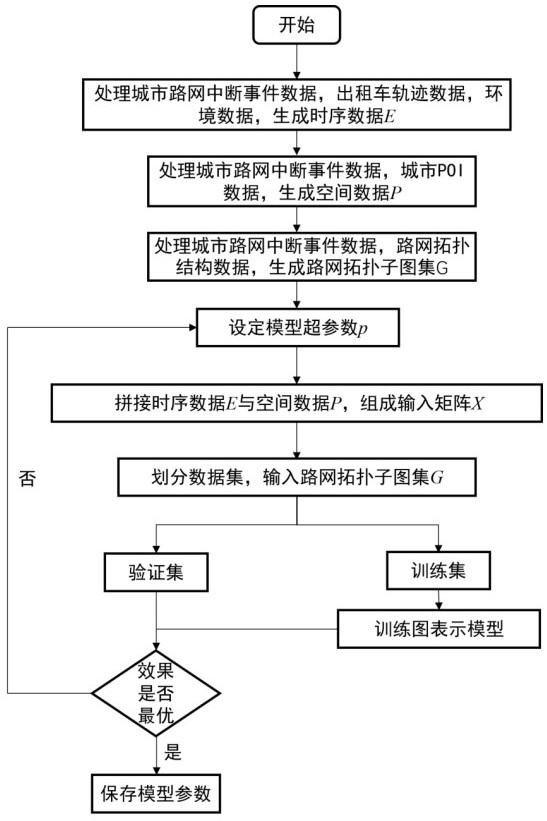
3、步骤s1:使用网格采样、邻域聚合、kd-tree最近邻搜索算法处理出租车轨迹gps数据、自然环境数据、城市poi数据,以经纬度为粒度匹配城市路网中断事件数据,生成时空数据序列;
4、步骤s2:使用网格采样、邻域聚合、kd-tree最近邻搜索算法与k-扩散算法处理路网拓扑结构数据,得到各中断事件地理位置对应的路网拓扑子图集。
5、步骤s3:将时空数据序列与路网拓扑子图集输入多源多核拓扑时空图表示模型进行训练,得到模型预测的时空数据序列和训练好的多源多核拓扑时空图表示模型;其中,所述多源多核拓扑时空图表示模型包括:空间特征表示模块、时空特征表示模块和综合依赖学习模块;重复步骤s3,对所述多源多核拓扑时空图表示模型进行迭代训练。
6、步骤s4:选取步骤s3保存的最佳模型,选取待预测地理位置节点,创建该节点路网拓扑子图集,生成该节点对应时空数据序列,输入到多源多核拓扑时空图表示模型中,即得到对城市任意节点交通路网交通中断的预测结果。
7、进一步,步骤s1的具体实现方法为,
8、步骤s11:处理出租车轨迹gps数据,生成城市车流流量数据:根据经纬度将城市划分为多个l×l的网格,记录固定时间窗t中网格内车流流量数据ge,车流流量数据ge格式为m×k,其中m为采集的数据长度,k为划分网格数目,初始车流流量数据中所有数据值都为0,遍历出租车轨迹gps数据,根据数据格式中的时间、经度、纬度信息匹配网格,对所匹配到的对应时刻的网格,车流流量数据值加一,处理完全部出租车轨迹gps数据后,即将出租车的轨迹数据转化为网格化的车流流量数据ge;
9、步骤s12:匹配城市路网中断事件数据、车流流量数据、自然环境数据,遍历城市路网中断事件数据,根据中断事件的类型信息,将其标记为交通事故与非交通事故,根据中断事件的经纬度信息,分别匹配两类外部数据即车流流量数据和自然环境数据;使用网格命中方法匹配车流流量数据,将中断事件发生地所处网格m×1的车流流量数据作为节点车流流量数据;使用k-d tree最近邻搜索算法匹配自然环境数据,按照气象观测点地理位置将气象观测点组织为k-d tree,使用最近邻搜索算法,在k-d tree上匹配与中断事件发生地欧氏距离最近的气象观测点,以固定周期t_poi记录该气象观测点的自然环境数据,生成m×1的自然环境数据作为节点自然环境数据;合并三类输入数据,得到(2m+1)×n的时序数据输入矩阵e,其中n为城市中断事件节点的个数。
10、步骤s13:匹配城市路网中断事件数据和城市poi数据,遍历城市路网中断事件数据,根据中断事件的类型信息,将其标记为交通事故与非交通事故,根据中断事件的经纬度信息,匹配城市poi数据;使用邻域聚合匹配城市poi数据,以中断事件发生地为中心节点做邻域聚合,将与中心节点经度、纬度距离差均小于l的城市poi数据聚合为节点poi数据;合并输入数据,得到2×n的空间数据输入矩阵p,其中n为城市中断事件节点的个数。
11、步骤s14:将时序数据输入矩阵e与空间数据输入矩阵p合并为(2m+3)×n的时空输入矩阵x,基于随机非重采样方法,按照70%、10%、20%的比例将时空输入矩阵x随机划分为训练集、验证集、测试集。
12、进一步,步骤s2的具体实现方法为:
13、步骤s21:匹配城市路网中断事件数据与路网空间拓扑节点:将路网拓扑结构数据中的节点按照经度、纬度作为坐标处理为二维二叉k-d树格式,遍历城市路网中断事件数据,对每一个中断事件地理位置,使用k-d树最近邻搜索算法寻找距该地理位置最近的路网空间拓扑节点,作为该中断事件所匹配的路网空间拓扑节点,保存为匹配点集合。
14、步骤s22:根据中断事件匹配点构造路网拓扑子图集:将路网拓扑结构按照邻接关系保存为邻接矩阵格式,遍历匹配点集合,每次取出一个匹配点,并构建路网拓扑子图,将匹配点加入路网拓扑子图中,对路网拓扑子图做k次邻接洪泛,即每次洪泛从当前路网拓扑子图出发,将与当前路网拓扑子图内节点邻接的节点添加到路网拓扑子图中,重复该操作k次,将最终生成的路网拓扑子图保存到路网拓扑子图集合中,形成路网拓扑子图集g。
15、进一步,步骤s3的具体实现方法为:
16、设定超参数p,p为观察窗口大小,构造多源多核拓扑时空图表示模型,该模型能够建模多源数据中的空间关联与时空关联,将步骤s1所生成的时空输入矩阵x拆分为合并前的时序数据输入矩阵e与空间数据输入矩阵p,根据城市路网拓扑子图,分别在路网拓扑子图上对空间数据输入矩阵p与时间数据输入矩阵e做不同类型的图表示操作,该多源多核拓扑时空图表示模型包含以下模块:
17、1)空间特征表示模块,构建空间特征表示模块具体包括:
18、步骤s311:使用多核拓扑图卷积在路网拓扑子图集g上学习空间数据输入矩阵p得到空间数据的隐藏层表示,公式为:为空间特征表示模块的拓扑子图结构,x为输入数据,k为表示维度,为的度矩阵,为可训练参数,使用线性整流函数relu处理得到的隐藏层表示,得到非线性激活后的空间数据隐藏层表示,使用批量归一化函数batchnorm1d处理得到的隐藏层表示,得到归一化后的空间数据隐藏层表示,公式表示为:为多核拓扑图卷积公式,l为表示模块堆叠层数,标记当前输入为第l层表示模块的输出,为输入隐藏层表示,为上述归一化函数,为上述线性整流函数;
19、步骤s312:跳转指定次数到步骤s311,实现空间多核拓扑图表示的串联操作,实现多级图表示,得到最终空间隐藏层表示hs;
20、2)时空特征表示模块,构建时空特征表示模块具体包括:
21、步骤s321:使用多核拓扑图卷积在路网拓扑子图集g上学习时序数据输入矩阵e得到时序数据的隐藏层表示,公式为:b为时空特征表示模块的拓扑子图结构,为的度矩阵,y为输入数据,u为表示维度,为可训练参数,使用线性整流函数relu处理得到的隐藏层表示,得到非线性激活后的时序数据隐藏层表示,使用批量归一化函数batchnorm1d处理得到的隐藏层表示,得到归一化后的时序数据隐藏层表示,公式表示为:为多核拓扑图卷积公式;为表示模块堆叠层数表示,标记当前输入为第层表示模块的输出,为输入隐藏层表示,为上述归一化函数,为上述线性整流函数;
22、步骤s322:使用一维池化函数avgpool1d对输入的隐藏层表示做一维池化,得到输出的时空数据隐藏层表示,公式表示为:,其中v为池化池尺寸,z为表示堆叠层数,标记当前输入为第z层表示模块的输出,为输入隐藏层表示,为表示函数稀疏矩阵;
23、步骤s323:跳转指定次数到步骤s321,实现时空多核拓扑图表示的串联操作,实现多级图表示,得到最终时序隐藏层表示ht;
24、3)综合依赖学习模块,构建综合依赖学习模块具体包括:
25、步骤s331:在空间特征表示模块和时空特征表示模块每轮表示学习完成后,保存内部隐藏层表示he,用以减少噪声数据对特征学习的影响;
26、步骤s332:拼接空间隐藏层表示hs、时序隐藏层表示ht、内部隐藏层表示he,使用线性输出函数linear、激活函数sigmoid串联处理拼接后的输出序列,得到模型预测值,公式如下:<mover><msub><mi>y</mi><mi>i</mi></msub><mo stretchy="true">̂</mo></mover><mi>=sigmoid(</mi><msubsup><mi>w</mi><mn>0</mn><mi>t</mi></msubsup><mi>∙[hs;ht;he]+</mi><msub><mi>b</mi><mn>0</mn></msub><mi>)</mi>,计算模型损失函数,梯度回传训练模型,其中,为线性输出函数系数矩阵,为线性输出函数偏置矩阵计,跳转到步骤s2;保存效果最好的模型。
27、本发明与现有技术相比,具有以下优点:
28、1、本发明公开了一种城市交通路网交通中断预测方法与框架,使用了多源数据深度时空图表示机制。针对时间序列模型、回归模型只能建模多特征间的时间依赖的问题,图表示模型只能建模单类型数据、依赖辅助模型,使用网格等粗粒度路网结构数据、空间关联粗糙、只能预测交通节点或区域的交通中断的问题,使用时空图表示机制,在建模输入数据时间依赖的同时,建模输入数据时空依赖;使用空间特征表示模块、时空表示模块,建模时序、空间两种类型、四种来源的数据,不依赖注意力机制等辅助模型;使用网格采样、邻域聚合、kd-tree最近邻搜索算法,以地理位置节点建模路网结构数据,细化空间关联粒度,能够对任意节点进行预测。
29、2、本发明提出的基于出租车轨迹gps数据、自然环境数据、路网拓扑结构、城市poi数据做网格采样、邻域聚合、kd-tree最近邻搜索算法从而获取所需数据的方法。相较于现有交通中断预测方法,无需布置路网流量传感器等专属设备,实现成本低,适用范围广,且模型效果受传感器节点布置区域影响小,有更强的抗干扰性。
30、3、本发明提出的方法以城市路网中断事件为基础,中断事件包含交通事故、交通管制、施工封路等多类型中断事件,相较于传统方法直接使用交通事故数据集,由于只存在发生交通事故的正样本、缺少未发生交通事故的负样本,预测模型易发生过拟合现象的问题。本模型从中断事件构建的交通事故数据集同时包含发生事故的正样本、未发生事故的负样本,避免模型过拟合,有更好的预测成绩。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189372.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表