车辆高速运动参数采集方法及装置
- 国知局
- 2024-07-31 21:34:16
本发明属于车辆运动参数采集领域,涉及一种车辆高速运动参数采集方法及装置。
背景技术:
1、目前为了得到车辆运动参数,通常是采用卫星定位技术和蜂窝无线定位技术来解算序列化的定位信息来实现。然而,由于定位时的精度问题,很难大部分时间都精确感知到车辆在高速行驶过程中的运动参数,例如车辆行驶时进行变道以及车辆与车辆间进行会车等。解决这个问题的方法是运用惯性导航技术,简而言之就是主要利用惯性传感器检测汽车在惯性参考系中的惯性加速度和欧拉角速度等惯性参数。但是,这种技术的运动参数感知性能取决于惯性传感器的性能。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种车辆高速运动参数采集方法及装置。
2、为达到上述目的,本发明提供如下技术方案:
3、一方面,本发明提供一种车辆高速运动参数采集方法,包括以下步骤:
4、s1:在不同时间内控制不同高清摄像头对车辆拍摄工作,通过顺时差分成像方法获取具有微小时间差连续帧的车辆所在路面细节图像;
5、s2:利用对路面图像细节在差分时间内偏移量的识别与匹配,结合标定参数、间隔时间和拍摄高度计算车辆相对于路面的运动速度、方向、横摆角;
6、s3:将步骤s2得到的参数融合陀螺仪、加速度计、磁力计和gnss得到车辆完整的运动参数。
7、进一步,步骤s1中,首先定义车辆二维坐标系,原点为车辆中心,车辆运动方向为横轴正方向,横轴逆时针旋转90°为纵轴方向;
8、根据速度积分原理,在离散情况下车辆位置的轨迹序列为(xn,yn),n=0,1,2,…,表示为:
9、
10、
11、式中t为两次采样的间隔,即(k-1)和k时刻的时间差;vk和uk分别为k时刻车辆在车辆坐标系中的纵向速度和横向速度,为车辆坐标系横轴与大地坐标系横轴的夹角在(k-1)至k时刻期间的增量,定义为“瞬态横摆角”;vn和un分别表示n序列时车辆在车辆坐标系中的纵向速度和横向速度,表示车辆坐标系横轴与大地坐标系横轴的夹角在n序列时的增量;
12、当t足够小时,所计算的轨迹序列无限逼近真实轨迹,且车辆坐标系横轴与大地坐标系xoy横轴夹角的累计值为:
13、
14、其中,定义x0=0、y0=0,则只要感知和检测到车辆在采样时刻k的纵向速度vk、横向速度uk和瞬态横摆角从而重构出车辆的运动轨迹。
15、进一步,步骤s1中所述差分成像是指间隔一定时间,具有一定视场重合度的两次成像工作模式,在车辆运动过程中,通过车载设备差分成像对路面进行拍摄,则第k次差分成像在δ时间间隔连续获取2帧图像,即a帧图像ⅰa(k)和b帧图像ⅰb(k),此时路面特征点将分别呈现在2帧图像上,通过特征点的坐标差别反映出车辆相对于路面的位移和横摆运动,从而获取车速和横摆角速度。
16、进一步,步骤s2中,利用图像识别技术获取各特征点在两帧图像中的坐标,求解下式中的d和β,经过图像距离与地面距离的尺度增益得到k时刻的车辆运动参数:
17、vk=αdx/δ
18、uk=αdy/δ
19、
20、式中α=h/f为尺度增益;h为差分成像设备与路面间的高度差;f为成像系统特性参数;δ为间隔时间;
21、用加速鲁棒性特征(speeded up robust features,surf)匹配算法识别道路的纹理特点,hessian矩阵是surf匹配算法的核心,使用hessian矩阵及其判别式来判定图像中的某一点是否为图像的极值点,从而检测出图像中的特征点及其位置与尺度;假设图像中的某一点为i(u,v),图像尺度为σ,则该点的hessian矩阵为:
22、
23、式中,为高斯函数g(u,v,σ)的二阶微分与图像在点i(u,v)的卷积结果;
24、当hessian矩阵的判别式取得局部极大值或极小值时,判定当前点较周围邻域内其他点更亮或更暗,由此定位关键点,检测出图像在尺度σ下特征点的响应值,遍历所有像素,检测出该尺度下所有的特征点;surf匹配算法采用不断增大滤波器模板尺寸求取hessian矩阵响应值,求取不同尺度下的特征点。
25、进一步,步骤s3中,设置车辆俯仰角、横滚角以及航向角的测量范围和测量精度,然后通过3个角速率陀螺仪进行实时测量;
26、通过3个伺服加速度计对车辆加速度进行实时测量;
27、通过磁力计定位车辆的具体方位;
28、通过gps/ins组合导航系统对车辆导航参数进行实时监测;
29、最后对所有数据进行时间同步,得到车辆完整的运动参数。
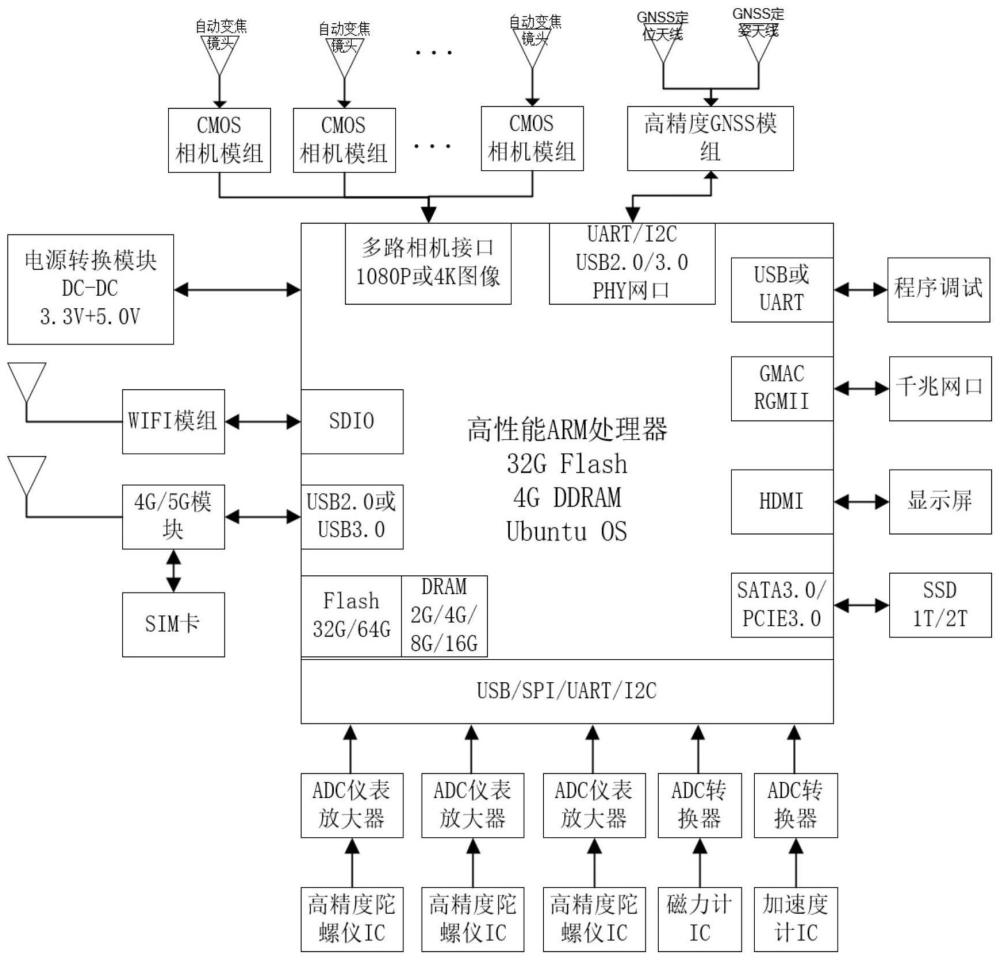
30、另一方面,本发明提供一种车辆高速运动参数采集系统,包括微处理器mcu,以及与微处理器连接的陀螺仪、磁力计、加速度计、多个cmos相机模组、gns模组、通信模块、显示屏及存储模块;
31、所述陀螺仪用于测量车辆俯仰角、横滚角以及航向角;
32、所述磁力计用于测量出当前车辆与东南西北四个方向上的夹角;
33、所述加速度计用于对车辆加速度进行实时测量;
34、所述多个cmos相机模组由同一个时钟管理,通过微处理器mcu控制其启动时刻,实现各个cmos相机模组的差分成像;
35、所述gns模组用于接收卫星信号,进行卫星定位;
36、所述通信模块用于接收基准站差分数据;
37、所述显示屏及存储模块用于显示数据和存储数据。
38、本发明的有益效果在于:针对目前国内汽车运动参数检测产品精度不高、数据采集频率低等问题,设计了车辆高速运动参数高精度采集方法及装置。本发明特点在于高精度、低成本、数据采集频率高、误检率低。
39、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:1.一种车辆高速运动参数采集方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的车辆高速运动参数采集方法,其特征在于:步骤s1中,首先定义车辆二维坐标系,原点为车辆中心,车辆运动方向为横轴正方向,横轴逆时针旋转90°为纵轴方向;
3.根据权利要求1所述的车辆高速运动参数采集方法,其特征在于:步骤s1中所述差分成像是指间隔一定时间,具有一定视场重合度的两次成像工作模式,在车辆运动过程中,通过车载设备差分成像对路面进行拍摄,则第k次差分成像在δ时间间隔连续获取2帧图像,即a帧图像ⅰa(k)和b帧图像ⅰb(k),此时路面特征点将分别呈现在2帧图像上,通过特征点的坐标差别反映出车辆相对于路面的位移和横摆运动,从而获取车速和横摆角速度。
4.根据权利要求1所述的车辆高速运动参数采集方法,其特征在于:步骤s2中,利用图像识别技术获取各特征点在两帧图像中的坐标,求解下式中的d和β,经过图像距离与地面距离的尺度增益得到k时刻的车辆运动参数:
5.根据权利要求1所述的车辆高速运动参数采集方法,其特征在于:步骤s3中,设置车辆俯仰角、横滚角以及航向角的测量范围和测量精度,然后通过3个角速率陀螺仪进行实时测量;
6.一种车辆高速运动参数采集系统,其特征在于:包括微处理器mcu,以及与微处理器连接的陀螺仪、磁力计、加速度计、多个cmos相机模组、gns模组、通信模块、显示屏及存储模块;
技术总结本发明涉及一种车辆高速运动参数采集方法,属于车辆运动参数采集领域,包括以下步骤:S1:在不同时间内控制不同高清摄像头对车辆拍摄工作,通过顺时差分成像方法获取具有微小时间差连续帧的车辆所在路面细节图像;S2:利用对路面图像细节在差分时间内偏移量的识别与匹配,结合标定参数、间隔时间和拍摄高度计算车辆相对于路面的运动速度、方向、横摆角;S3:将步骤S2得到的参数融合陀螺仪、加速度计、磁力计和GNSS得到车辆完整的运动参数。本发明还提供一种车辆高速运动参数采集装置。技术研发人员:邓天民,余洋,彭栎丹,邓天清,兰一凡受保护的技术使用者:重庆交通大学技术研发日:技术公布日:2024/3/17本文地址:https://www.jishuxx.com/zhuanli/20240731/190146.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。