融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法
- 国知局
- 2024-07-31 22:25:08
本发明属于汽车主动安全领域,涉及一种车辆碰撞预警系统的运维方法,尤其涉及一种基于信息融合的车辆碰撞预警系统的运维方法。
背景技术:
1、随着人们生活水平的提高及生活节奏的加快,汽车作为便捷的交通工具成为人们出行的首选,道路交通事故也逐渐成为人们生命和财产安全的严重威胁。其中,两车和多车碰撞是道路交通事故中最严重的事故类型之一。一些匝道汇入和无信号灯交叉路口极容易发生车辆碰撞事故。车辆碰撞事故一旦发生,往往易导致严重的人员伤亡和重大的经济损失。因此,在汽车碰撞发生前发出预警,是避免车辆碰撞事故的汽车安全与辅助驾驶的重要措施。车辆碰撞预警系统的预警模式主要分两种:一是参考实时车速与加速度等车辆状态基于安全碰撞距离模型进行碰撞预警;二是根据运动轨迹预测碰撞时间,参考安全碰撞时间模型进行碰撞预警。两个方法都需要对车辆的行驶状态和轨迹进行预测,因此准确估计状态和预测轨迹是实现碰撞预警的关键技术。
2、为了减小交通事故的发生概率和事故造成的损伤,科研人员对车辆碰撞问题进行了大量的研究,比如安全时间算法或安全距离算法进行自动紧急制动控制,以及基于多特征进行碰撞预测实现协同碰撞预警等。虽然这些基于参数或非参数车辆运动模型进行碰撞预警的方法,对车辆碰撞问题有一定的指导意义,但是碰撞预警精度极大地依赖于轨迹预测模型的精度,一旦车辆实际运行工况与运动模型不符,即工况存在不确定性时,碰撞预测精度很难得到保证。
3、在实际使用中,现有车辆碰撞预警系统运维方法存在如下不足:
4、1、现有技术未充分考虑灰色模型预测和卡尔曼滤波的信息融合,车辆碰撞预警精度有待提高。
5、2、现有技术未提出车辆状态估计器和灰色模型预测器的协同方法,车辆碰撞预警精度有待提高。
6、3、现有技术在计算安全碰撞预警时间中的驾驶员反应时间时,未考虑驾驶员风格,车辆碰撞预警系统的个性化适应能量不足。
7、4、现有技术将灰色模型预测器的原始数据个数设定为常数,需要在预测精度和计算负荷做权衡,无法达到两方面的最优。
8、5、现有技术未从车辆状态估计器和灰色模型预测器的协同角度提出它们的同步运行关系,容易发生数据冲突或数据过剩。
技术实现思路
1、为了克服上述问题,本发明提出同时解决上述多种问题的方案。
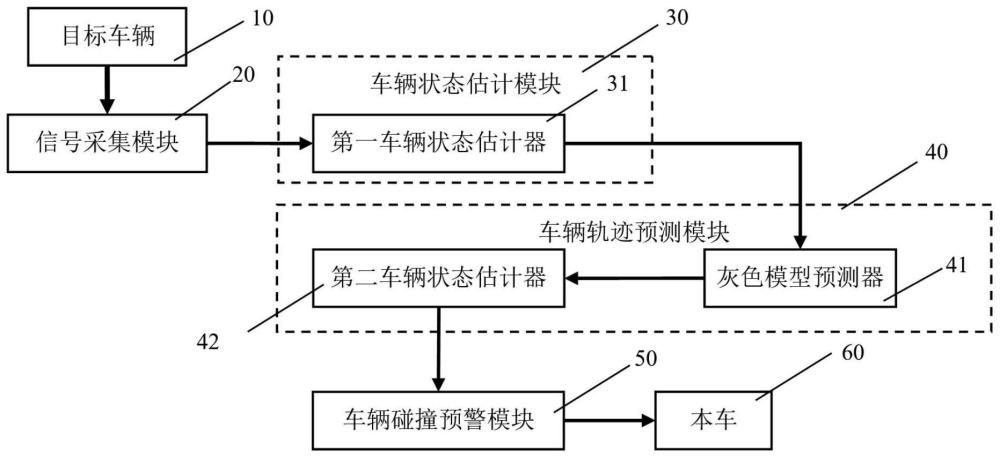
2、提供一种融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,其应用的系统包括信号采集模块、车辆状态估计模块、车辆轨迹预测模块和车辆碰撞预警模块;车辆状态估计模块为第一车辆状态估计器;车辆轨迹预测模块包括灰色模型预测器和第二车辆状态估计器;信号采集模块检测目标车辆相对本车的相对位置,作为量测变量输出给第一车辆状态估计器;第一车辆状态估计器进行车辆相对运动状态估计,作为灰色模型预测器的原始数据。
3、本发明解决其技术问题所采用的技术方案是:灰色模型预测器进行n步车辆相对位置预测,作为第二车辆状态估计器的输入;
4、第二车辆状态估计器进行车辆相对运动轨迹估计,作为车辆碰撞预警模块的输入;
5、车辆碰撞预警模块在安全碰撞预警时间内有碰撞风险时,对本车进行碰撞预警;
6、在启动灰色模型预测器进行多步车辆相对位置预测时,第一车辆状态估计器首先独立运行m步,为灰色模型预测器准备原始数据;
7、第二车辆状态估计器和灰色模型预测器同步工作;
8、驾驶员根据自己的驾驶风格,可在激进、普通和保守三类中选择其一作为当前风格;
9、预警系统通过比较第二车辆状态估计器的实际和理论新息协方差矩阵大小,自适应调整灰色模型预测器的原始数据个数m。
10、优选的,所述车辆碰撞预警系统运维方法在启动预警系统时,第一车辆状态估计器首先独立运行m步后,再与第二车辆状态估计器和灰色模型预测器同步工作。
11、优选的,所述车辆碰撞预警系统运维方法确保控制系统在计算安全碰撞预警时间中的驾驶员反应时间时,充分考虑驾驶员的驾驶风格。对于激进型驾驶风格采用较短的反应时间;对于普通型驾驶风格采用中等反应时间;对于保守型驾驶风格采用较长的反应时间。
12、优选的,所述车辆碰撞预警系统运维方法在调整灰色模型预测器的原始数据个数m时,采用如下策略:
13、mk=αkm0
14、
15、其中m0为灰色模型预测器的原始数据个数初始值,mk为第k步的m值,k为离散的时间步,和ck分别为实际和理论新息协方差矩阵。
16、优选的,所述车辆碰撞预警系统运维方法采用如下的规则确定车辆状态估计器和灰色模型预测器的同步运行关系:
17、当mk>mk-1时,第二车辆状态估计器和灰色模型预测器停止工作,等第一车辆状态估计器独立运行mk-mk-1步后,再同步工作;当mk≤mk-1时,第一车辆状态估计器、第二车辆状态估计器和灰色模型预测器继续保持同步工作状态。
18、本发明的有益效果是:
19、1、针对背景技术第1点,本发明充分考虑了车辆运动模型进行碰撞预警的缺陷,通过灰色模型预测和卡尔曼滤波的信息融合来提高预警精度。
20、2、针对背景技术第2点,本发明基于灰色模型预测器的原始数据个数m实现了车辆状态估计器和灰色模型预测器的协同。
21、3、针对背景技术第3点,本发明在计算安全碰撞预警时间中的驾驶员反应时间时考虑驾驶员风格,使得车辆碰撞预警系统适应不同的驾驶员。
22、4、针对背景技术第4点,本发明根据实际新息协方差矩阵和理论新息协方差矩阵的关系动态调整灰色模型预测器的原始数据个数m,同时实现预测精度和计算负荷的最佳。
23、5、针对背景技术第5点,本发明提出了实现第一车辆状态估计器、第二车辆状态估计器和灰色模型预测器三者的协同运行关系,确保数据不发生冲突和过剩。
24、注:上述改进措施不分先后,每一条都使得本发明相对现有技术具有区别和显著的进步。
技术特征:1.融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,应用的预警系统包括信号采集模块(20)、车辆状态估计模块(30)、车辆轨迹预测模块(40)和车辆碰撞预警模块(50);车辆状态估计模块(30)为第一车辆状态估计器(31);车辆轨迹预测模块(40)包括灰色模型预测器(41)和第二车辆状态估计器(42);信号采集模块(20)检测目标车辆(10)相对本车(60)的相对位置,作为量测变量输出给第一车辆状态估计器(31);第一车辆状态估计器(31)进行车辆相对运动状态估计,作为灰色模型预测器(41)的原始数据;灰色模型预测器(41)进行n步车辆相对位置预测,作为第二车辆状态估计器(42)的输入;第二车辆状态估计器(42)进行车辆相对运动轨迹估计,作为车辆碰撞预警模块(50)的输入;车辆碰撞预警模块(50)在安全碰撞预警时间内有碰撞风险时,对本车(60)进行碰撞预警,其特征在于:在启动灰色模型预测器(41)进行多步车辆相对位置预测时,第一车辆状态估计器(31)首先独立运行m步,为灰色模型预测器(41)准备原始数据;
2.根据权利要求1所述的融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,其特征在于:预警系统启动时,第一车辆状态估计器(31)首先独立运行m步后,再与第二车辆状态估计器(42)和灰色模型预测器(41)同步工作。
3.根据权利要求1所述的融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,其特征在于:安全碰撞预警时间中的驾驶员反应时间受驾驶风格影响;激进型驾驶风格对应较短的反应时间;普通型驾驶风格对应中等反应时间;保守型驾驶风格对应较长的反应时间。
4.根据权利要求1所述的融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,其特征在于:调整灰色模型预测器(41)的原始数据个数m的策略为
5.根据权利要求1或4所述的融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,其特征在于:当mk>mk-1时,第二车辆状态估计器(42)和灰色模型预测器(41)停止工作,等第一车辆状态估计器(31)独立运行mk-mk-1步后,再同步工作;当mk≤mk-1时,第一车辆状态估计器(31)、第二车辆状态估计器(42)和灰色模型预测器(41)继续保持同步工作状态。
技术总结融合灰色模型和卡尔曼滤波的车辆碰撞预警系统运维方法,系统包括信号采集模块、车辆状态估计模块、车辆轨迹预测模块和车辆碰撞预警模块。车辆状态估计模块为第一车辆状态估计器,车辆轨迹预测模块包括灰色预测模型和第二车辆状态估计器;第一车辆状态估计器先独立运行为灰色预测模型准备原始数据,然后与车辆轨迹预测模块同步工作;碰撞预警模块在计算安全碰撞预警时间时,考虑驾驶员驾驶风格差别,根据激进、普通和保守三类确定反应时间。技术研发人员:黄彩霞,张志勇,王宇翔,张细政受保护的技术使用者:湖南工程学院技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240731/193288.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表