用于检测空间中的物体的雷达系统和方法与流程
- 国知局
- 2024-08-05 11:51:38
本发明涉及用于检测空间中的物体的雷达系统和方法。
背景技术:
1、为了检测、尤其是为了定位空间中的物体,使用了雷达传感器,这些雷达传感器布置在转子上并因此围绕旋转轴线可旋转地布置。通过转子的位置可以检测由雷达传感器捕获的反射信号的方位角。方位角对应于信号从其反射的空间中的物体的方位角位置。为了检测仰角,已知使用具有多个彼此间隔开一定距离布置的接收天线的雷达传感器。通过在各种接收天线处捕获反射信号的相移和接收天线之间的已知距离,可以检测反射信号的仰角。此外,仰角可以使用所谓的相控阵法来检测,其中使用多个发射天线并且从每个发射天线以确定的相移发射信号。由此,可以使传播的发射波束在其传播方向方面偏转。
2、us2018/0267160a1被称为现有技术。
3、已知系统和方法的缺点是需要大量的发射和/或接收天线来检测仰角,由此伴随着高的系统复杂性。发射信号和接收信号的处理相应地是复杂的。在这里,系统的分辨率的改进伴随着进一步的复杂性提高。因此,常规雷达系统成本高昂。
技术实现思路
1、因此,本发明所基于的目的是提供一种雷达系统,利用该雷达系统可以可靠且精确地检测空间中的物体,并且该雷达系统具有低的开发、制造和操作成本。
2、本发明所基于的目的还在于提供一种方法,利用该方法可以可靠且精确地检测空间中的物体,并且该方法易于实施。
3、根据本发明,该目的通过具有权利要求1的特征的雷达系统、具有权利要求15的特征的方法以及具有权利要求20的特征的雷达系统来实现。
4、本发明的有利的设计方案和改进方案在从属权利要求中给出。
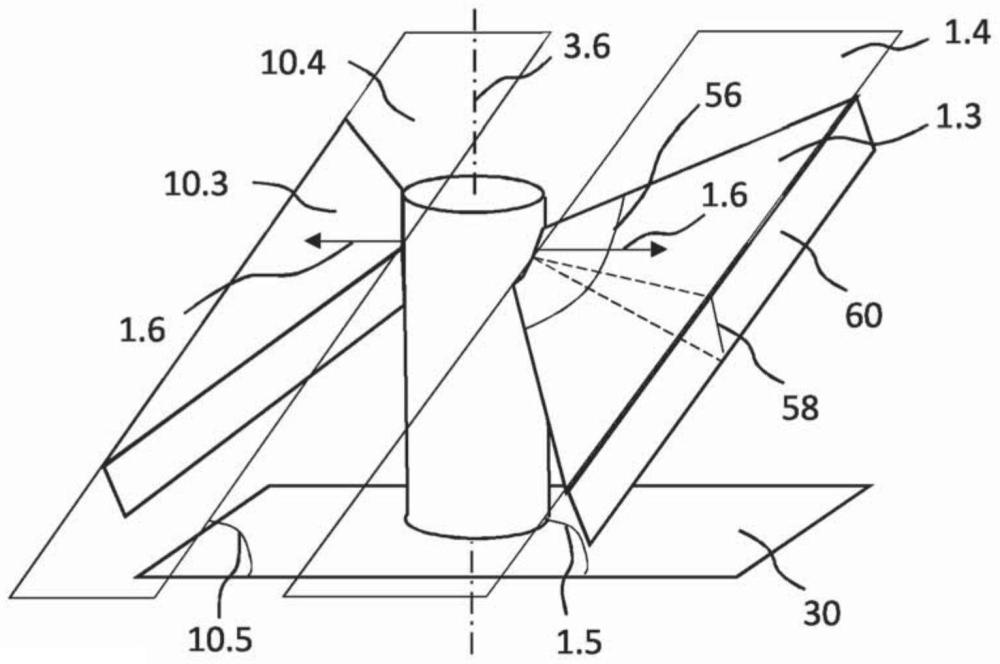
5、根据本发明的雷达系统包括第一定位传感器和第二定位传感器,其中,第一定位传感器和第二定位传感器构成为雷达传感器,其中,第一定位传感器和第二定位传感器如此在移动方向上偏移地布置在公共载体上,使得它们具有传感器偏移,其中,载体在移动方向上可移动地布置。此外,根据本发明的雷达系统具有用于检测定位传感器的定位传感器位置的器件,其中,可以借助第一定位传感器产生第一定位辐射波瓣,并且可以借助第二定位传感器产生第二定位辐射波瓣,定位辐射波瓣呈扇形构成为各自具有扇形主平面,其中,第一定位辐射波瓣的第一扇形主平面与假想的平行于移动方向布置的基平面成第一迎角布置,并且第二定位辐射波瓣的第二扇形主平面与基平面成第二迎角布置,第一迎角和第二迎角不同。在这里,移动方向的术语优选如此使用,使得移动方向也包括相应相反的方向。
6、在第一定位传感器和第二定位传感器之间的传感器偏移优选使得第一定位传感器和第二位置传感器在移动方向上偏移地布置在载体上。移动方向优选水平布置。
7、定位辐射波瓣由于它们的扇形形状而优选在一方向上构成得非常窄并在垂直于该方向的方向上构成得非常宽。在这里,相应扇形主平面优选平行于由发射方向和相应定位辐射波瓣构成得宽的方向限定的平面布置。由于第一迎角和第二迎角不同,优选地,布置在第一定位辐射波瓣和第二定位辐射波瓣之间的偏移尤其依赖于仰角。
8、为了描述空间上的布置和移动,这里优选使用“仰角”和“方位角”的概念。用仰角来优选描述在围绕水平轴线的旋转方向上的位置。通常,这里优选用仰角方向来描述垂直于移动方向布置的方向。方位角优选描述在围绕垂直轴线的旋转方向上的位置。通常,这里优选用方位角方向来描述围绕垂直于移动方向布置的旋转轴线的旋转方向。特别优选地,移动方向水平地布置,使得可以用方位角来描述在水平方向上的取向,用仰角来描述在垂直方向上的取向。
9、优选地,载体构成为转子,该转子相对于定子围绕旋转轴线可旋转地布置,使得移动方向构成为是旋转的。在这里,旋转轴线优选垂直于移动方向布置。
10、在本发明的一个优选实施方式中,用于检测定位传感器位置的器件构成为编码器系统。编码器系统可以如此构成,使得可以用其捕获载体尤其相对于定子的布置。因此,可以借助编码器系统来检测定位传感器的定位传感器位置。优选地,编码器系统构成为旋转编码器。编码器系统优选如此布置在雷达系统上,使得至少一个读取头布置在载体上并且量具布置在定子上。特别优选地,编码器系统具有第一读取头和第二读取头。由此,编码器系统可以至少部分地冗余地构成。
11、在本发明的一个优选实施方式中,定位辐射波瓣如此布置,使得第一扇形主平面和第二扇形主平面相对于移动方向反向于基平面倾斜。由此,可以增强定位辐射波瓣的偏移对仰角的依赖性。
12、特别优选地,第一迎角和第二迎角具有相同的大小。由此,可以尤其简化雷达系统的结构和数据评估。
13、定位辐射波瓣优选如此构成,使得它们各自具有主张角和垂直于其布置的横向张角,主张角为至少90°、优选至少120°,并且主张角与横向张角的比率大于5:1,优选大于10:1。因此,定位辐射波瓣中的每一个可以具有椭圆形或近似矩形的横截面。优选地,主张角描述平行于相应扇形主平面的定位辐射波瓣的张角。横向张角优选垂直于主张角布置。空间中的物体的定位尤其需要高分辨率和尽可能高的更新率。这可以通过定位辐射波瓣的可旋转的布置和几何形状来实现。尤其地,由于每个定位辐射波瓣的横截面相对较窄,定位传感器可以实现高分辨率。
14、在本发明的一个优选实施方式中,第一定位传感器构成为捕获第一反射定位信号,并且第二定位传感器构成为捕获第二反射定位信号,在第一反射定位信号和第二反射定位信号之间布置有信号偏移,并且其中,雷达系统具有定位计算单元,该定位计算单元构成为使用信号偏移与传感器偏移的比率来确定反射仰角。反射定位信号的仰角优选被称为反射仰角。相应反射定位信号优选是由于由相应定位传感器发射的定位辐射波瓣而由空间中的物体反射的信号。在这里,第一反射定位信号和第二反射定位信号优选由相同的反射物体反射。信号偏移优选形成在第一信号位置和第二信号位置之间。对应于相应信号位置的载体位置可以优选利用用于检测定位传感器位置的器件来捕获。优选地,捕获到第一反射定位信号时的第一定位传感器的定位传感器位置被称为第一信号位置,并且相应优选地,捕获到第二反射定位信号时的第二定位传感器的定位传感器位置被称为第二信号位置。
15、信号偏移可以相应地形成在当借助第一定位传感器捕获到第一反射定位信号时的载体位置和当借助第二定位传感器捕获到第二反射定位信号时的载体位置之间。相应载体位置可以利用用于检测定位传感器位置的器件、尤其是利用编码器系统来捕获。尤其地,当传感器偏移和迎角已知时,定位计算单元可以使用信号偏移与传感器偏移的比率来确定反射仰角。
16、优选地,定位计算单元构成为根据第一反射定位信号和/或第二反射定位信号来检测反射位置值和距离值,由反射仰角、反射位置值和距离值形成定位数据集。相应反射定位信号在移动方向上的位置可以被称为反射位置值。反射位置值通常优选不同于接收相关的反射定位信号的定位传感器的定位传感器位置。反射位置值可以尤其根据接收相关的反射定位信号的定位传感器的定位传感器位置和相应扇形主平面的迎角来确定。接收的定位传感器的定位传感器位置的检测可以尤其基于由编码器系统捕获的载体位置来检测。为了确定距离值,可以尤其使用在定位信号的发射和反射定位信号的捕获之间的运行时间。距离值可以描述反射物体距相应定位传感器的距离。借助定位数据集可以优选清楚地描述反射物体在空间中的位置。
17、定位计算单元优选与定位传感器和用于检测定位传感器位置的器件连接。优选地,定位计算单元布置在载体上。雷达系统可以具有旋转馈通件,以连接载体和定子之间的电源线和数据线。此外,雷达系统可以具有第一定位计算单元和第二定位计算单元作为冗余并用于提高雷达系统的可靠性。优选地,第一定位计算单元和第二定位计算单元相同地构成。
18、在本发明的一个优选实施方式中,定位计算单元构成为将第一定位数据集与第二定位数据集进行比较,并且仅继续处理不同的数据。在这里,继续处理可以尤其包括数据传输。利用定位传感器扫描的环境可以具有相对于定位传感器的静态物体,该静态物体的反射定位信号随着时间推移而不变化或不显著变化。通过将第二定位数据集与第一定位数据集进行比较,可以将静态物体与相对于定位传感器移动的物体分开。此外,可以通过比较来减少待继续处理的数据量。由此,可以尤其提高雷达系统的动态性和精确性。优选地,定位计算单元如此构成,使得在转子的每一圈时执行比较。
19、在本发明的一个改进方案中,雷达系统具有用于识别物体的至少一个识别传感器,其中,可以借助至少一个识别传感器产生识别辐射波瓣,并且其中,至少一个识别传感器构成为固定式雷达传感器。物体的识别优选借助由物体产生的特征性雷达签名来执行。雷达签名可以包括多普勒频率的频谱,即所谓的多普勒签名,利用该多普勒签名可以在高分辨率下实现对活物体和非活物体的区分。关于多普勒签名的高分辨率需要相对长的观测时间,这会尤其与用于定位物体的高更新率相反。由于雷达系统具有可旋转的定位传感器以及优选至少一个固定式识别传感器,因而雷达系统可以为空间中物体的同时定位和识别提供理想的先决条件。
20、优选地,识别辐射波瓣具有至少90°、特别优选至少120°的主张角,并且识别辐射波瓣具有至少90°、特别优选至少120°的横向张角。因此,识别辐射波瓣优选具有圆形或近似正方形的横截面。此外,识别辐射波瓣的主张角和横向张角因此相对较大,使得可以借助识别传感器捕获大范围。优选地,识别辐射波瓣的主张角布置在仰角方向上,并且识别辐射波瓣的横向张角布置在方位角方向上。
21、优选地,至少一个识别传感器布置在定子上。由此,可以实现雷达系统的简单且统一的结构。
22、在本发明的一个改进方案中,雷达系统具有第一识别传感器和第二识别传感器,该第一识别传感器和该第二识别传感器优选以特别优选在移动方向上布置的180°的偏移布置在定子上。由此,可以在大范围内识别物体。雷达系统还可以具有另外的识别传感器,以便可以覆盖更大的范围。在这里,不同的识别传感器的识别辐射波瓣可以至少近似相同或不同地构成。
23、雷达系统可以具有至少一个识别计算单元,该识别计算单元构成为识别反射识别信号的雷达签名。为此,雷达系统可以尤其构成为将反射识别信号的多普勒签名分配给确定的物体。尤其地,识别计算单元可以构成为将反射识别信号的雷达签名与参考数据库进行比较。至少一个识别计算单元优选尤其与至少一个识别传感器连接。至少一个识别计算单元可以布置在定子上。
24、此外,雷达系统可以具有第一识别计算单元和第二识别计算单元作为进一步的冗余并用于进一步提高雷达系统的可靠性。
25、雷达系统可以具有中央计算单元,该中央计算单元构成为将反射识别信号分配给反射定位信号。由此,雷达系统可以以高分辨率定位并同时识别空间中的物体。为此,中央计算单元优选与至少一个定位计算单元和至少一个识别计算单元连接。为了可以将反射识别信号分配给反射定位信号,至少一个识别传感器优选如此构成,使得其可以基于反射识别信号来至少近似地定位物体。优选地,至少一个识别传感器为此具有一个发射天线和至少两个接收天线。由此,反射识别信号可以使用波束形成法优选由至少一个识别计算单元处理。在这里,基于反射识别信号的物体定位可能会比基于反射定位信号的定位明显不精确。
26、一种用于确定空间中的物体的方法借助构成为定位传感器的第一雷达传感器并借助构成为定位传感器的第二雷达传感器来执行,第一定位传感器和第二定位传感器如此在移动方向上偏移地布置在公共载体上,使得它们具有传感器偏移,其中,载体在移动方向上可移动地布置。在载体的移动周期期间执行以下步骤:
27、·借助第一定位传感器发射第一定位辐射波瓣,并且借助第二定位传感器发射第二定位辐射波瓣,其中,定位辐射波瓣呈扇形构成为各自具有扇形主平面,其中,第一定位辐射波瓣的第一扇形主平面与假想的平行于移动方向布置的基平面成第一迎角布置,并且第二定位辐射波瓣的第二扇形主平面与基平面成第二迎角布置,并且第一迎角和第二迎角不同;
28、·借助第一定位传感器捕获第一反射定位信号并捕获相关的第一信号位置;
29、·借助第二定位传感器捕获第二反射定位信号并捕获相关的第二信号位置;
30、·检测在第一信号位置和第二信号位置之间的信号偏移;
31、·使用信号偏移与传感器偏移的比率来确定反射仰角。
32、优选地,上述步骤在载体的移动周期期间执行多次。优选地,第一信号位置和第二信号位置借助编码器系统来捕获。优选地,载体可旋转地布置,并且移动周期通过载体的绕转来形成。
33、如果在上面说明的雷达系统的描述中存在这样一个特征,该特征对应于该方法所提及的当前特征中的一个并且具有的相同的名称,则关于雷达系统描述的解释优选地以相同方式应用于该方法的当前特征。因此,例如关于雷达系统的定位传感器或定位辐射波瓣的上述说明可以相应地应用于该方法的定位传感器或定位辐射波瓣。
34、在本发明的一个优选实施方式中,根据第一反射定位信号和/或第二反射定位信号来检测反射位置值和距离值,由反射仰角、反射位置值和距离值形成定位数据集。
35、优选地,该方法如此构成,使得载体执行多个运动周期,其中,将第二定位数据集与具有相同的反射方位角的第一定位数据集进行比较。根据上述雷达系统的实施方案,可以由此减少待继续处理的数据量并且还简化了对移动物体的识别。
36、该方法优选如此构成,使得该方法附加地具有以下步骤:
37、·借助构成为识别传感器的固定式雷达传感器发射识别辐射波瓣;
38、·捕获具有雷达签名的反射识别信号;
39、·识别雷达签名;
40、·将反射识别信号分配给反射定位信号。
41、雷达签名可以包括多普勒频率的频谱,即所谓的多普勒签名,其可以在高分辨率下实现对活物体和非活物体的区分。雷达签名优选使用多普勒签名来执行识别。识别雷达签名尤其可以包括将反射识别信号与参考数据库进行比较。
42、为了可以将反射识别信号分配给反射定位信号,反射物体可以基于反射识别信号来至少近似地定位。优选地,反射识别信号为此借助波束形成法来处理。这样做,基于反射识别信号的物体定位可能会比基于反射定位信号的定位明显不精确。
43、优选地,上述雷达系统构成为执行所说明的方法。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259756.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。