基于CBCT技术的无托槽隐形矫治器系统的制作方法
- 国知局
- 2024-08-05 11:57:12
本发明涉及三维影像,更具体地说,本发明涉及基于cbct技术的无托槽隐形矫治器系统。
背景技术:
1、在没有现代三维影像技术出现之前,口腔颅颌面三维有限元分析和无托槽隐形矫治等技术研究主要依赖于传统的层析法,即通过对石膏模型进行逐层磨掉来获取每层的影像资料,这个过程费时费力且效率较低。
2、随着螺旋ct和cbct等三维影像技术的发展,医生们能够更准确地观察牙槽骨、牙根及其位置关系,为牙齿移动提供更可靠的判断依据。
3、然而,尽管螺旋ct和cbct数据为医生提供了更多的三维信息,但虚拟排牙和这些数据并不是完全结合在一起的。单独的虚拟排牙和单独的螺旋ct或cbct数据,仍然需要医生进行主观的预测和判断,缺乏对于牙齿在移动过程中动态三维空间关系的准确判断。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供基于cbct技术的无托槽隐形矫治器系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案,基于cbct技术的无托槽隐形矫治器系统,包括数据重建模块、图像分析模块、三维模型模块,以及虚拟矫治方案设计模块;
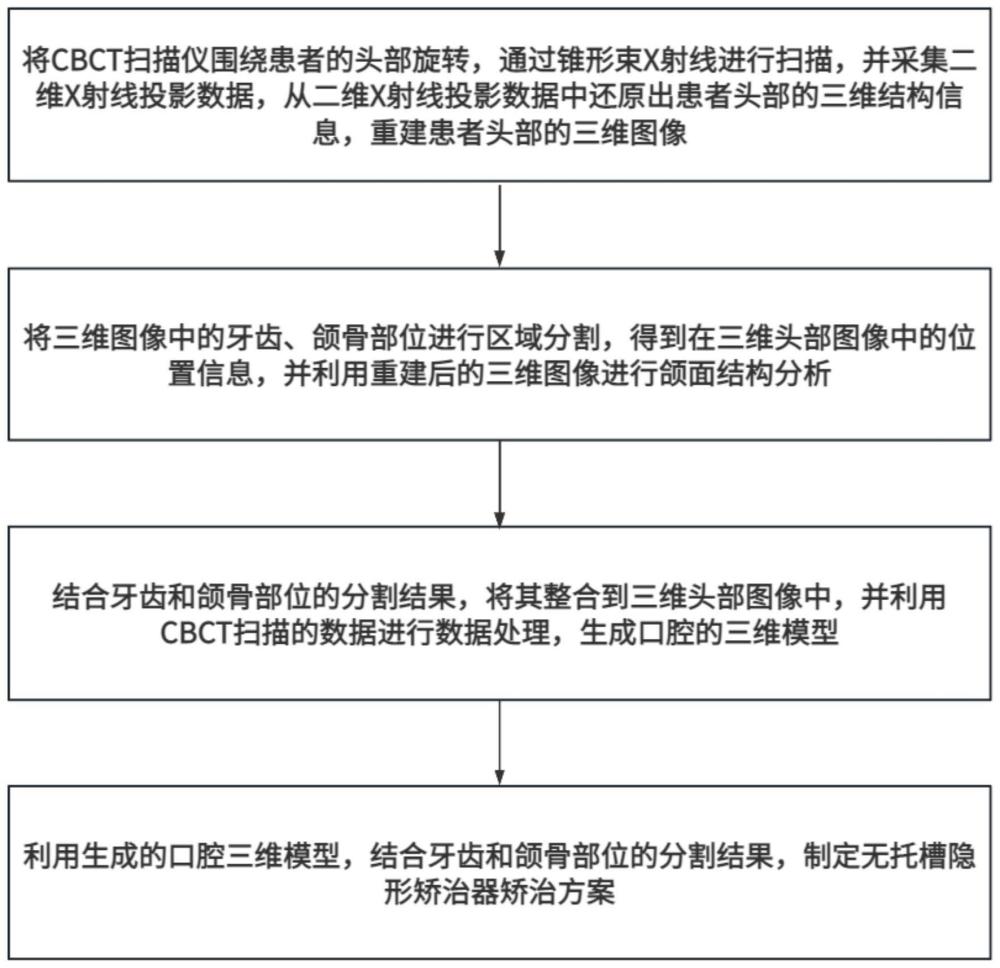
3、数据重建模块:将cbct扫描仪围绕患者的头部旋转,通过锥形束x射线进行扫描,并采集二维x射线投影数据,从二维x射线投影数据中还原出患者头部的三维结构信息,重建患者头部的三维图像;
4、图像分析模块:将三维图像中的牙齿、颌骨部位进行区域分割,得到在三维头部图像中的位置信息,并利用重建后的三维图像进行颌面结构分析;
5、三维模型模块:结合牙齿和颌骨部位的分割结果,将其整合到三维头部图像中,并利用cbct扫描的数据进行数据处理,生成口腔的三维模型;
6、虚拟矫治方案设计模块:利用生成的口腔三维模型,结合牙齿和颌骨部位的分割结果,制定个性化的无托槽隐形矫治器矫治方案。
7、在一个优选地实施方式中,所述数据重建模块,将cbct扫描仪围绕患者的头部旋转,通过锥形束x射线进行扫描,并采集二维x射线投影数据,从二维x射线投影数据中还原出患者头部的三维结构信息,重建患者头部的三维图像,具体步骤如下:
8、a1、radon变换:在cbct扫描中,通过多次旋转x射线源和探测器,获取大量不同角度的投影数据,将二维投影数据转换到radon空间,表示x射线束在物体内部吸收的强度,通过对物体各个点的吸收系数进行积分投影,得到在不同角度和距离处的投影强度,实现对物体内部结构的探测和重建,具体计算公式如下:
9、
10、其中,r(θ,t)是在角度θ和距离t处的投影强度,f(x,y)是物体在(x,y)处的吸收强度,θ是旋转角度,t是平移距离;
11、a2、滤波和反投影:对radon空间的数据进行滤波处理,以提高重建图像的质量和清晰度,根据滤波后的数据进行反投影计算,将各个方向的投影数据反投影到空间中对应的位置,得到三维重建图像,具体计算公式如下:
12、
13、其中,v(x,y,z)是在三维空间中像素位置为(x,y,z)处的重建图像值,(x,y,z)是重建图像中的像素位置,r(θ,t)是在角度θ和距离t处的投影强度,d是扫描仪的最大检测范围,f-1是傅里叶逆变换,ω(t)是滤波函数,δ是狄拉克函数,用于将投影数据反投影到对应的空间位置。
14、在一个优选地实施方式中,所述图像分析模块,将三维图像中的牙齿、颌骨部位进行区域分割,得到在三维头部图像中的位置信息,并利用重建后的三维图像进行颌面结构分析,具体步骤如下:
15、b1、区域分割:将三维图像中的牙齿、颌骨部位进行区域分割,通过区域生长算法识别和分割出三维图像中具有相似特征的区域,包括牙齿、颌骨部位,区域分割包括以下步骤:
16、步骤s1、初始化:选择种子点(xs,ys,zs)作为起始点,设置初始阈值tth和生长准则;
17、步骤s2、区域生长准则:将像素灰度强度相似性定义为一个生长准则,以决定是否将相邻像素加入到当前区域,当相邻像素的灰度值与种子点的灰度值之差小于阈值tth,则将该像素加入当前区域,具体计算公式如下:
18、|i(x,y,z)-i(xs,ys,zs)|<tth
19、其中,i(x,y,z)表示像素(x,y,z)的灰度值,i(xs,ys,zs)表示种子点(xs,ys,zs)的灰度值,tth是设定的阈值;
20、步骤s3、生长过程:从种子点开始,根据生长准则逐步生长区域,将相邻像素逐个加入当前区域,直到达到预设的分割准则为止;
21、步骤s4、分割结果:最终得到以种子点为中心的一个区域。
22、b2、结构分析:针对不同的颌面结构部位,利用图像处理技术和医学影像分析软件进行详细的分析,包括牙齿的位置、数量、大小,颌骨的结构、密度参数的测量与分析,包括以下步骤:
23、步骤s1、牙齿位置、数量、大小的分析:使用边缘检测算法检测牙齿的边缘,并标记和分析图像中的连通区域,确定牙齿的数量,利用最小外接矩形方法拟合牙齿的形状并测量大小;
24、步骤s2、颌骨结构的分析:基于分割的颌骨区域,统计颌骨区域的像素灰度值,得到密度分布情况,进行结构和密度参数的测量。
25、在一个优选地实施方式中,所述三维模型模块,结合牙齿和颌骨部位的分割结果,将其整合到三维头部图像中,并利用cbct扫描的数据进行数据处理,生成口腔的三维模型,具体步骤如下:
26、c1、数据整合:将分割得到的牙齿和颌骨部位数据与三维头部图像进行整合,确保在同一坐标系下,并利用配准算法将不同部位的数据对齐到同一空间中,保证数据的一致性和连贯性;
27、c2、模型重建:利用整合后的数据进行口腔的三维重建,根据牙齿和颌骨部位的信息重建患者口腔的结构,采用体素化重建方法生成口腔的三维模型,进一步包括以下步骤:
28、步骤s1、体素化:将在三维空间中的一个长方体区域定义为一个口腔区域,将口腔区域进行离散化处理,将其分割成一系列小立方体单元,每个小立方体单元表示一个体素,每个体素代表口腔区域内的一个体积元素,对每个体素进行分类和属性赋值;
29、步骤s2、属性赋值:根据牙齿和颌骨部位的信息,对体素进行属性赋值,将牙齿体素标记为牙齿属性,颌骨体素标记为颌骨属性,并将牙齿体素和颌骨体素分别标记为1和0;
30、步骤s3、三维模型生成:通过空间体素的堆叠和连接,以及表面绘制算法,根据经过属性赋值的体素数据,生成口腔的三维模型。
31、在一个优选地实施方式中,所述虚拟矫治方案设计模块,利用生成的口腔三维模型,结合牙齿和颌骨部位的分割结果,制定个性化的无托槽隐形矫治器矫治方案,具体步骤如下:
32、d1、初始牙齿位置分析:在口腔三维模型的基础上,分析患者牙齿的位置、咬合情况,通过对牙齿位置的分析,确定调整的牙齿,以及矫治的目标和重点;
33、d2、制定矫治目标:根据患者的个人情况和期望的矫治效果,制定具体的矫治目标,包括牙齿的最终位置、咬合关系的改善;
34、d3、路径规划:结合初始牙齿位置分析和矫治目标,设计牙齿移动的路径,确定每颗牙齿移动的距离、方向,设一颗牙齿的初始位置为(p0,q0)目标位置为(p1,q1),将牙齿的移动路径分为m个步骤,每个步骤移动一个小段距离,通过计算每个小段距离的曲线函数,来描述牙齿从初始位置到目标位置的移动路径,进一步包括以下步骤:
35、步骤s1、定义3个控制点:起始点h0(p0,q0),终点h3(p1,q1),和两个中间的控制点h1和h2,p1和p2的位置是根据初始位置和目标位置计算得出的,具体计算公式如下:
36、h1=h0+(p1-p0)×d1
37、h2=h3-(p1-p0)×d2
38、其中,h1和h2分别是中间的控制点,h0(p0,q0)是起始点位置,h3(p1,q1)是终点位置,d1是一个介于0和1之间的常量,d2是与d1相反的介于0和1之间的常量,用来调整控制点的位置;
39、步骤s2、使用三次贝塞尔曲线的参数方程来计算每个小段距离的曲线函数,通过计算多个小段距离的曲线函数,得到从初始位置到目标位置的整个移动路径,具体计算公式如下:
40、b(λ)=(1-λ)3×h0+3×(1-λ)2×h1+3×(1-λ)×λ2×h2+λ3×h3
41、其中,b(λ)表示贝塞尔函数,h1和h2分别是中间的控制点,λ为一个介于0和1之间的参数,用来描述曲线上的点的位置。
42、本发明的有益效果是:将cbct扫描仪围绕患者的头部旋转,通过锥形束x射线进行扫描,并采集二维x射线投影数据,从二维x射线投影数据中还原出患者头部的三维结构信息,重建患者头部的三维图像,将三维图像中的牙齿、颌骨部位进行区域分割,得到在三维头部图像中的位置信息,并利用重建后的三维图像进行颌面结构分析,结合牙齿和颌骨部位的分割结果,将其整合到三维头部图像中,并利用cbct扫描的数据进行数据处理,生成口腔的三维模型,利用生成的口腔三维模型,结合牙齿和颌骨部位的分割结果,制定无托槽隐形矫治器矫治方案,根据患者的口腔情况和矫治需求,制定个性化的矫治计划,使矫治器更贴合牙齿,提高矫治效果。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260263.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表