一种网罩全自动生产系统及其使用方法与流程
- 国知局
- 2024-08-05 12:19:11
本发明涉及机械制造和空调网罩铁丝网的交叉点焊,具体而言,涉及一种网罩全自动生产系统及其使用方法。
背景技术:
1、目前,空调网罩铁丝网的交叉点焊,现有焊接方式主要是采用人工上料,自动焊接,焊接完后再人工下料。人工成本高,劳动强度大,设备稳定性差,生产效率低,人工操作存在很多不确定因素、上料速度跟不上工件焊接速度。
2、综上所述,存在如下至少一种技术问题:
3、采用人工上料,自动焊接,焊接完后再人工下料。人工成本高,劳动强度大,设备稳定性差,生产效率低,人工操作存在很多不确定因素、上料速度跟不上工件焊接速度。
技术实现思路
1、本发明的主要目的在于提供一种网罩全自动生产系统及其使用方法,以解决现有技术中采用人工上料,自动焊接,焊接完后再人工下料。人工成本高,劳动强度大,设备稳定性差,生产效率低,人工操作存在很多不确定因素、上料速度跟不上工件焊接速度的技术问题。
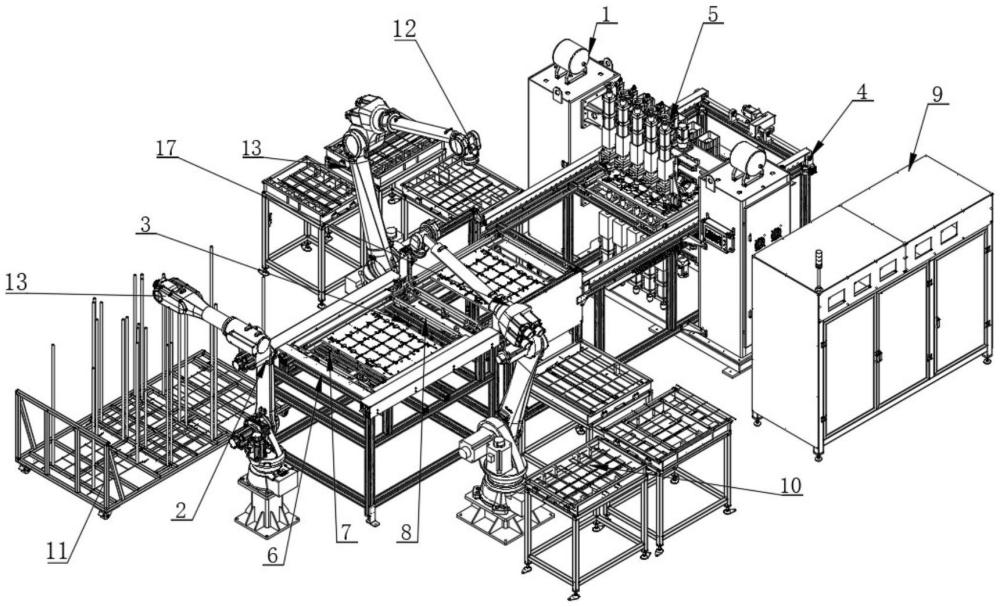
2、为了实现上述目的,根据本发明的一个方面,提供了一种网罩全自动生产系统,包括:
3、铝材支架总成,所述铝材支架总成上设有锁模机构、推拉模机构、脱模机构、模具小车和顶出机构;
4、龙门焊机总成,所述龙门焊机总成设置在铝材支架总成一端;
5、上料机器人总成,所述上料机器人总成设置在铝材支架总成两侧;
6、模具周转机构,所述模具周转机构设置在铝材支架总成上;
7、下料机器人总成,所述下料机器人总成设置在铝材支架总成的另一端;
8、传动机构,所述传动机构设置在铝材支架总成上;以及
9、码垛小车总成,所述码垛小车总成设置在下料机器人总成一侧。
10、优选的,还包括控制器总成,所述控制器总成分别与龙门焊机总成、上料机器人总成、模具周转机构、下料机器人总成、传动机构、码垛机器人总成相连以及铝材支架总成上的锁模机构、推拉模机构、脱模机构、模具小车相连。
11、优选的,还包括料斗,所述料斗设置在上料机器人总成一侧,所述上料机器人人总成成对设置,所述上料机器人总成分别设置在铝材支架总成的两侧。
12、优选的,所述传动机构包括:
13、伺服座;
14、伺服电机,所述伺服电机设置在伺服座上;
15、减速器,所述减速器与伺服电机相连;
16、转轴,所述转轴与减速器相连;
17、传动轮,所述传动轮与转轴相连;以及
18、传动带,所述传动带与传动轮相连。
19、优选的,所述焊机总成包括:
20、机箱总成,所述机箱总成成对相对设置;
21、直线导轨,所述直线导轨成对设置在机箱总成之间,上下平行设置;
22、上加压机构,所述上加压机构设置在位于上方的直线导轨上;
23、下加压机构,所述下加压机构设置在位于下方的直线导轨上;
24、焊头,所述焊头设置在上加压机构和下加压机构上。
25、优选的,所述锁模机构包括:
26、锁紧安装座,所述锁紧安装座设置在铝材支架总成上;
27、线性滑块,所述线性滑块设置在锁紧安装座的两端;
28、插销气缸,所述插销气缸设置在锁紧安装座上;
29、插销,所述插销与插销气缸相连。
30、优选的,所述铝材支架总成上的传动机构用于将工件送入龙门焊机总成进行焊接;所述铝材支架总成上的传动机构用于将焊好的工件送出到工件顶出机构上方。
31、优选的,所述上料机器人总成用于将铁丝网线材自动上料。
32、优选的,所述龙门焊机总成用于对铁丝网线材自动焊接。
33、根据本发明的另一方面提供了一种网罩全自动生产系统的使用方法,包括:
34、步骤1:铁丝网线材通过上料机器人总成的上料机器人抓取后自动放到铝材支架总成上;
35、步骤2:通过铝材支架总成上的传动机构将工件送入龙门焊机总成进行焊接;
36、步骤3:焊接完成后,通过铝材支架总成上的传动机构将焊好的工件送出到工件顶出机构上方;
37、步骤4:工件顶出机构将工件顶后,然后下料机器人将焊好的工件取出放入码垛小车总成,如此循环。
38、应用本发明的技术方案,具有如下技术效果:
39、铁丝网线材通过上料机器人总成的上料机器人抓取后自动放到铝材支架总成上;通过铝材支架总成上的传动机构将工件送入龙门焊机总成进行焊接;焊接完成后,通过铝材支架总成上的传动机构将焊好的工件送出到工件顶出机构上方;工件顶出机构将工件顶后,然后下料机器人将焊好的工件取出放入码垛小车总成,如此循环。设备自动化程度更高更稳定,采用机器人自动上料,自动输送,自动焊接,自动顶出工件,自动下料的方式,实现无人化生产,节省了人工成本,提高了生产效率。能同时生产多款不同工件,生产过程中可通过传感器识别不同工件然后机器人根据控制程序自动完成工件夹具快速换型,提高了设备的通用性和自动化程度。
技术特征:1.一种网罩全自动生产系统,其特征在于,包括:
2.如权利要求1所述的网罩全自动生产系统,其特征在于,还包括控制器总成,所述控制器总成分别与龙门焊机总成、上料机器人总成、模具周转机构、下料机器人总成、传动机构、码垛机器人总成相连以及铝材支架总成上的锁模机构、推拉模机构、脱模机构、模具小车相连。
3.如权利要求1所述的网罩全自动生产系统,其特征在于,还包括料斗,所述料斗设置在上料机器人总成一侧,所述上料机器人人总成成对设置,所述上料机器人总成分别设置在铝材支架总成的两侧。
4.如权利要求1所述的网罩全自动生产系统,其特征在于,所述传动机构包括:
5.如权利要求1所述的网罩全自动生产系统,其特征在于,所述焊机总成包括:
6.如权利要求1所述的网罩全自动生产系统,其特征在于,所述锁模机构包括:
7.如权利要求1所述的网罩全自动生产系统,其特征在于,所述铝材支架总成上的传动机构用于将工件送入龙门焊机总成进行焊接;所述铝材支架总成上的传动机构用于将焊好的工件送出到工件顶出机构上方。
8.如权利要求1所述的网罩全自动生产系统,其特征在于,所述上料机器人总成用于将铁丝网线材自动上料。
9.如权利要求1所述的网罩全自动生产系统,其特征在于,所述龙门焊机总成用于对铁丝网线材自动焊接。
10.一种网罩全自动生产系统的使用方法,基于权利要求1-9任意一项所述的网罩全自动生产系统,其特征在于,包括:
技术总结本发明公开了一种网罩全自动生产系统及其使用方法,包括铝材支架总成,铝材支架总成上设有锁模机构、推拉模机构、脱模机构、模具小车和顶出机构;龙门焊机总成,龙门焊机总成设置在铝材支架总成一端;上料机器人总成,上料机器人总成设置在铝材支架总成两侧;模具周转机构,模具周转机构设置在铝材支架总成上;下料机器人总成,下料机器人总成设置在铝材支架总成的另一端;传动机构,传动机构设置在铝材支架总成上;码垛小车总成,所述码垛小车总成设置在下料机器人总成一侧。具有自动化程度更高更稳定,采用机器人自动上料,自动输送,自动焊接,自动顶出工件,自动下料的方式,实现无人化生产,节省了人工成本,提高了生产效率的优点。技术研发人员:戴江松,徐国杰受保护的技术使用者:广州松合智能科技有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/262135.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表