一种基于中心视觉传感的双钨极电弧耦合形态的监测装置与方法
- 国知局
- 2024-08-08 16:47:55
本发明属于焊接设备,涉及一种基于中心视觉传感的双钨极电弧耦合形态的监测装置与方法。
背景技术:
1、双钨极氩弧焊技术作为一种新型高效焊接方法,因电弧之间发生耦合使其在较高电流条件下仍可保持较低的电弧力,提高了焊丝的熔覆率,具有抑制驼峰缺陷的优点,因而其能够实现在大电流高速焊接时,能够极大的减少凹坑、咬边等缺陷,得到成形良好的焊缝。但双钨极氩弧焊存在电弧干扰而不稳定的现象,目前,双钨极的电弧干扰均利用控制电弧之间的耦合效果来消除电弧干扰从而促进焊接效果。
2、专利号为cn109483021a提出的一种双钨极脉冲tig焊方法,将两个钨极垂直设置,使双钨极电弧耦合,能够提高双钨极tig焊最大许用电流,并且有效减少钨极烧损,但无法得知双钨极电弧的耦合情况,对其改善双钨极焊接效果比较困难。专利号为cn109483022a提出了一种气-磁联合调控双钨极toptig焊焊接方法,该方法通过空心钨极和普通钨极进行电弧耦合,并施加外部磁场控制,使得焊接热输出更加集中,磁场对电弧偏转影响程度极大,控制精度差。专利号为cn114131146a提出的一种双钨极自动焊接控制方法及系统,该方法通过对两台电源模拟量控制的方式改变双电源的相位差进而控制双电弧进行耦合,进而控制焊接过程中的稳定性,但该发明主要控制相位差改善双钨极电弧耦合情况,对焊接时双电弧的耦合状态的变化无法实时判定。
技术实现思路
1、因此,针对上述基于当前对双钨极电弧耦合情况无法确定的缺陷,且现有的视觉传感装置相对于焊枪运动的位置局限性,本发明提供了一种基于中心视觉传感的双钨极电弧耦合形态的监测装置与方法。
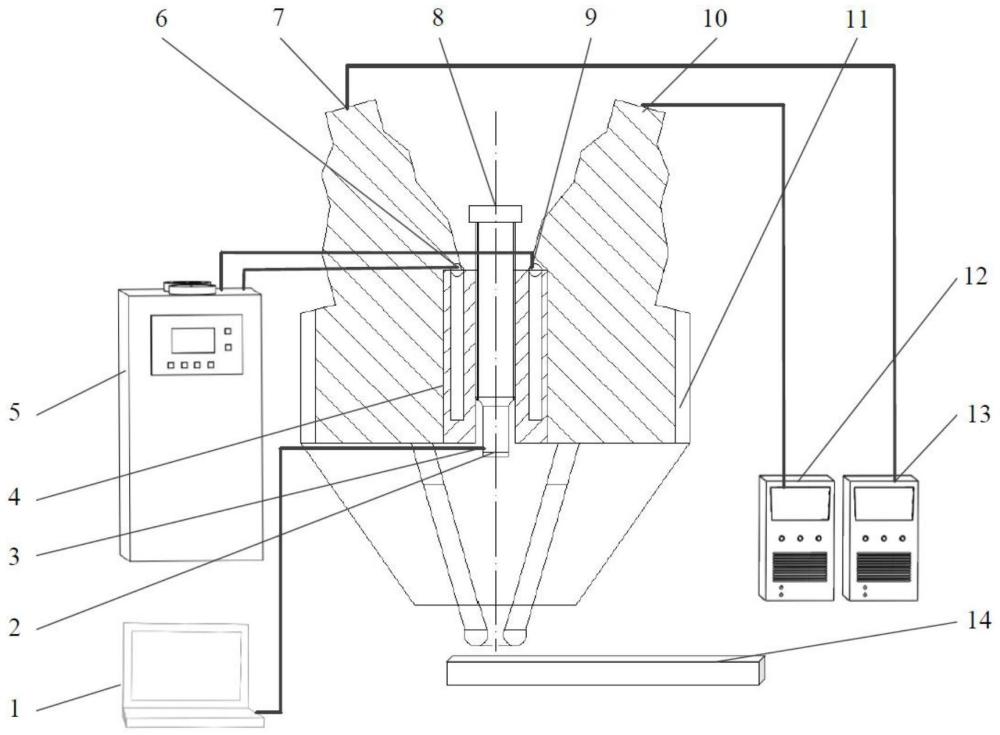
2、为达到上述目的,本发明采用的技术方案是:一种基于中心视觉传感的双钨极电弧耦合形态的监测装置,包括双钨极耦合电弧视觉传感模块和视觉传感循环冷却模块。
3、双钨极耦合电弧视觉传感模块,具体包括微型相机镜头,微型相机镜头镶嵌在微型相机调节杆上,微型相机镜头与左钨极和右钨极的间隙中心对应,微型相机镜头通过网线与计算机连接,微型相机挡光片外嵌在微型相机镜头前。
4、视觉传感循环冷却模块,具体包括循环冷却铜块,微型相机镜头和微型相机调节杆通过螺纹与循环冷却铜块内部连接,循环冷却铜块内嵌在双钨极焊枪的枪体内,与双钨极焊枪集成一体,进水管和出水管固定在循环冷却铜块上侧连接,进水管与出水管和水箱连接,与循环冷却铜块的内部环形空腔形成循环视觉冷却功能。
5、进一步的,微型相机镜头直径大小为2~4mm,镜头中心线位于两钨极连线的中垂线上。
6、进一步的,微型相机镜头与左右钨极尖端中心轴线交点的距离为20~30mm。
7、进一步的,微型相机调节杆通过与循环冷却铜块的螺纹连接来移动,其对微型相机镜头到循环冷却铜块底部的距离调节范围为1~8mm。
8、一种基于中心视觉传感的双钨极电弧耦合形态的监测方法,具体包括以下步骤:
9、1)设置左右钨极间距,设置焊接电流、脉冲频率等参数。
10、2)在计算机端调节微型相机的镜头参数,并预设双钨极电弧的耦合度范围,使其在焊接过程中能够监测到清晰的双钨极耦合电弧图像。
11、3)启动焊接程序,等待焊枪移动至起弧点,随后启动视觉传感循环冷却模块,左右钨极先后起弧,随之,双钨极耦合电弧视觉传感模块立即启动,对双钨极电弧图像的耦合度进行实时监测,焊枪按预设路径运动,计算机端根据实时传输的电弧图像对耦合电弧度进行分析判断,当耦合电弧存在间隙时,计算机端判断双钨极电弧耦合度为0以下,并由计算机端发送命令给机器人,机器人对焊接电流参数进行实时调整;当耦合电弧不存在间隙,但计算机端判断双钨极电弧耦合度为0~8%时,双电弧处于耦合不良状态,计算机端亦通过机器人实时调整焊接电流参数,控制双钨极电弧耦合度在8%-30%为耦合良好。
12、4)焊枪运动至路径末,左右钨极先后熄弧,计算机端发送停止命令,微型相机、机器人、焊机皆进入待机状态,视觉传感循环冷却模块运转一段时间后关闭。
13、进一步的,左右钨极末端间距范围在2.0~6.0mm。
14、进一步的,左右钨极所通的焊接电流范围均为80~250a,双钨极电弧的耦合度在-10%~30%。
15、本发明与现有技术相比有如下优点:
16、(1)本发明设计的基于中心视觉传感的双钨极电弧耦合形态的监测装置,解决了无法确定双钨极电弧是否存在间隙及具体耦合情况的问题。
17、(2)微型相机的设置与可调节机构极大的解决了当前用于监测电弧的视觉传感装置相对于焊枪运动的位置受限问题。
18、(3)可以适用于不同焊接方法的双钨极焊接领域,可广泛应用于双钨极电弧耦合特性的研究。
技术特征:1.一种基于中心视觉传感的双钨极电弧耦合形态的监测装置,其特征在于:该装置包括双钨极耦合电弧视觉传感模块和视觉传感循环冷却模块;
2.根据权利要求1所述的一种基于中心视觉传感的双钨极电弧耦合形态的监测装置,其特征在于:所述的微型相机镜头(3)直径大小为2~4mm,镜头中心线位于两钨极连线的中垂线上。
3.根据权利要求1所述的一种基于中心视觉传感的双钨极电弧耦合形态的监测装置,其特征在于:所述的微型相机镜头(3)与左右钨极尖端中心轴线交点的距离为20~30mm。
4.根据权利要求1所述的一种基于中心视觉传感的双钨极电弧耦合形态的监测装置,其特征在于:所述微型相机调节杆(8)通过与循环冷却铜块(4)的螺纹连接来移动,其对微型相机镜头到(3)循环冷却铜块(4)底部的距离调节范围为1~8mm。
5.一种基于权利要求1-4任一项所述的基于中心视觉传感的双钨极电弧耦合形态的监测装置的方法,其特征在于,具体包括以下步骤:
6.根据权利要求5所述的一种基于中心视觉传感的双钨极电弧耦合形态的监测方法,其特征在于:左右钨极末端间距范围在2.0~6.0mm。
7.根据权利要求5所述的一种基于中心视觉传感的双钨极电弧耦合形态的监测方法,其特征在于:左右钨极所通的焊接电流范围均为80-250a,双钨极电弧的耦合度在-10%~30%。
技术总结本发明公开了一种基于中心视觉传感的双钨极电弧耦合形态的监测装置与方法。该装置包括双钨极耦合电弧视觉传感模块和视觉传感循环冷却模块。基于中心视觉传感的双钨极电弧耦合形态的监测方法是利用微型相机调节杆来来调整视觉传感装置的精准度,利用循环冷却模块冷却的双钨极耦合电弧视觉传感模块,实时在焊接过程中对两个钨极的电弧图像进行采集,并通过计算机端对双钨极电弧耦合图像特征进行提取、识别、分析来判断电弧的耦合形态,进而经机器人控制焊机改变焊接电流参数实现对电弧耦合度的调整。本发明能改善视觉传感设备相对于焊枪运动的位置受限问题,并通过对电弧耦合度来确定双钨极电弧的耦合情况,从而实现高加热效率的双钨极焊接。技术研发人员:冯曰海,张潇,王克鸿,黄俊,周琦,彭勇,张德库受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/270428.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。