一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法
- 国知局
- 2024-08-08 16:52:57
本发明属于光学陀螺领域,是一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法。
背景技术:
1、陀螺仪在惯性导航系统中发挥着关键作用,在商业和军事领域都有广泛的应用。消费类智能设备、微型无人机和微型卫星的发展强调了对高度精确、紧凑和集成光学陀螺仪的巨大需求,目前有大量研究致力于芯片级光学陀螺仪的发展。谐振式微光学陀螺仪(rmog)以小型环形谐振腔或基于芯片的配置为特征,且其精度与环形长度无关,因此,rmog成为了集成光学陀螺仪的首选解决方案。然而,在传统rmog中,由sagnac效应引起的共振分裂与器件的线性尺寸直接相关,导致不理想的精度水平。例如,半径为5mm、波长为1.55μm、旋转速度约为1°/h的rmog,其sagnac频率分裂约为0.02hz,然而许多实际应用需要测量0.1–100°/h范围内的角速度。在完全集成的光学平台中,环路的面积通常更小,可能要小几个数量级,因此在完全集成的光学平台中获得这样一个灵敏度水平面临着巨大的挑战。
2、由于bender等人的开创性研究,激发了人们对非厄米系统中奇异点(ep)特别是其在传感器应用方面的极大兴趣。bender等人证明了一种特殊形式的非厄米哈密顿量,其在宇称(p)算符和时间(t)算符的联合操作下表现出实特征值。ep是这些宇称-时间(pt)对称的系统的一个有趣的性质,在ep处,系统的本征值和其相应的特征向量同时发生简并。在ep附近特征值的强光谱响应激发了许多传感应用的研究工作。
3、在ep处工作的2×2阶的非厄米系统中,特征值的分裂与所施加扰动的平方根成正比,因此系统对小扰动显示出增强的灵敏度。一般来说,高阶ep有望实现光与物质相互作用的实质性增强,超过现有的基本限制,这一特点使它们特别引人注目。具体而言,对于由n个不同的本征值和相关本征态合并而成的n阶ep(epn),当有ε大小的扰动作用于系统时,其响应为然而,由于制造缺陷的复杂性和敏感性,在现有方案中实施高阶ep是一项相当困难的任务。
技术实现思路
1、针对现有技术的不足,本发明提供一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法,首先,通过构造倒8形谐振腔,利用谐振腔的不对称耦合在不增加参数调控难度的情况下,将二阶非厄米系统扩展到四阶系统;然后,通过在倒8形谐振腔中嵌入π-相移布拉格光栅,实现高灵敏度的sagnac效应输出。基于此,本发明提供一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法。
2、本发明提供了一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法,本发明提供了以下技术方案:
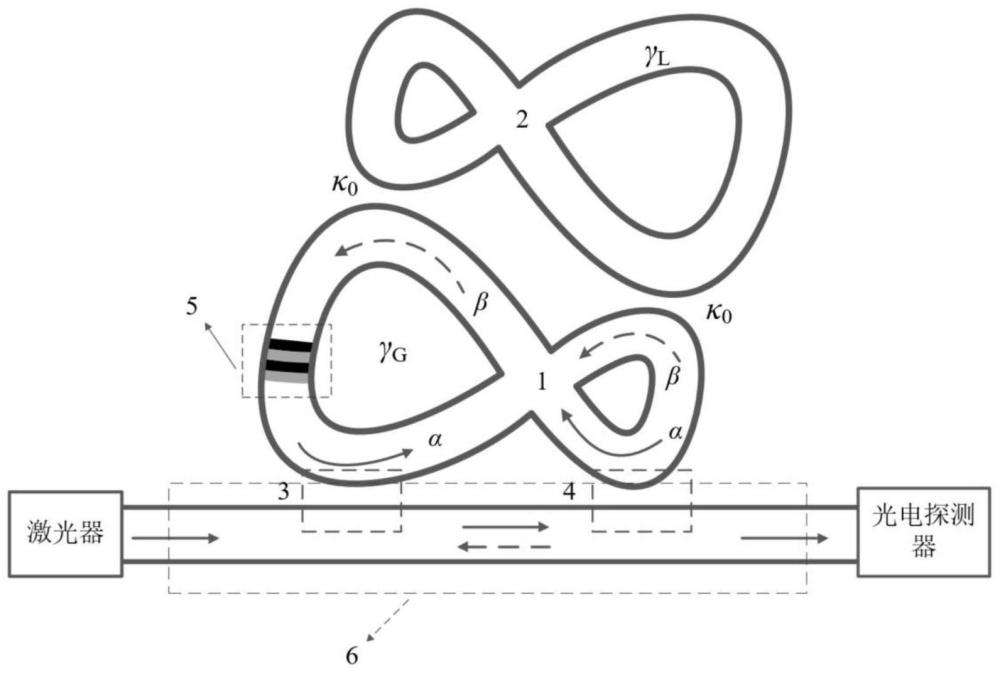
3、一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪,其特征在于,所述高灵敏度微光学陀螺仪包括:激光器、有源倒8形谐振腔、无源倒8形谐振腔、第一耦合器、第二耦合器、直波导、π-相移布拉格光栅、光电探测器;
4、所述激光器通过直波导经由第一耦合器与有源倒8形谐振腔的左波瓣耦合,再通过第二耦合器与有源倒8形谐振腔的右波瓣耦合;
5、所述无源倒8形谐振腔与有源倒8形谐振腔直接耦合;
6、所述光电探测器通过直波导与有源倒8形谐振腔相连。
7、一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法,包括以下步骤:
8、步骤1:构造宇称-时间pt对称系统;
9、步骤2:基于宇称-时间pt对称系统,利用直波导将二阶系统调节至四阶系统;
10、步骤3:通过调节有源倒8形谐振腔和无源倒8形谐振腔的增益损/耗值以及两者间的耦合系数,使其特征值的虚部发生简并,从而将步骤二中的系统调节至非厄米系统中ep点;
11、步骤4:将π-相移布拉格光栅嵌入有源倒8形谐振腔中,实现陀螺sagnac效应的非线性输出;
12、步骤5:计算基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪相较于传统陀螺仪的灵敏度提升因子。
13、优选地,所述步骤1具体为:
14、有源倒8形谐振腔和无源倒8形谐振腔的形状完全相同,均由两个不对称波瓣通过交叉连接在一起,通过有源倒8形谐振腔和无源倒8形谐振腔间的直接耦合来构造pt对称系统。
15、优选地,所述步骤2具体为:
16、有源倒8形谐振腔的两个波瓣都耦合到直波导,波瓣和直波导之间的两个耦合率分别为μl和μr,通过与直波导的两次耦合激发,耦合的两个谐振腔中具有四个传输模态,在只有两个谐振腔的情况下,通过利用直波导与倒8形谐振腔的两次耦合,二阶系统被调节为四阶系统。
17、优选地,所述步骤3具体为:
18、通过时间耦合理论求出系统的动力学方程:
19、
20、其中,ω0为两个倒8形谐振腔的谐振频率,κ0为两个倒8形谐振腔的直接耦合率,γg为有源倒8形谐振腔的增益率,γl为无源倒8形谐振腔的损耗率,表示光模态在有源倒8形谐振腔的两瓣之间传播所获得的相位。
21、由式(1)可求出系统的特征频率,表示为:
22、
23、其中,γ1=(γg+μr+μl)/2,γ2=γl/2,κep=(γ2-γ1)/2表示将系统调节至ep处的耦合系数。在ep处,所有四个本征频率及其相应的本征向量同时发生简并。
24、优选地,所述步骤4具体为:
25、当有角速度ω,cw方向作用于系统时,π-相移布拉格光栅会引起所在谐振腔中反向传播模态间的相互耦合,其扰动哈密顿量hω可以表示为:
26、
27、其中,δωs是与转速相关的sagnac相移,因此π-相移布拉格光栅引起的反向模态耦合系数ε(δωs)为与转速相关的系数;
28、当角速度ω足够小,即δωs<<ε(δωs),则本征频率分裂可表示为δωep=2e-iπ/4κ11/4κep1/2ε(δωs)1/4,展现出频率分裂与转速的四次方根关系。
29、优选地,所述步骤5具体为:
30、基于高阶非厄米奇异特性的高灵敏度微光学陀螺的sagnac比例因子通过下式表示为:
31、
32、其中,2πr/(neffλ)是传统陀螺仪的sagnac比例因子,一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺的sagnac比例因子的增强因子2e-iπ/4κep1/2κ11/4[c/(neffl)]1/4rg-3/4取决于耦合率κ1和π-相移布拉格光栅的反射振幅rg,反射振幅rg由π-相移布拉格光栅的结构参数决定。
33、优选地,通过使用高灵敏度的π-相移布拉格光栅可使基于高阶非厄米奇异特性的微光学陀螺的灵敏度提升多个数量级。
34、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法。
35、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现一种基于高阶非厄米奇异特性的高灵敏度微光学陀螺仪设计方法。
36、本发明具有以下有益效果:
37、本发明与现有技术相比:
38、本发明通过利用倒8形谐振腔与直波导的不对称耦合,使二阶pt对称系统在不增加调控参数个数的情况下从二阶非厄米系统调节至四阶非厄米系统;通过采用高灵敏度的π-相移布拉格光栅来引起背向传播光模态间的耦合,实现sagnac效应的非线性输出。本发明可以保证光学陀螺仪在满足微体积的同时具有极高灵敏度。
本文地址:https://www.jishuxx.com/zhuanli/20240808/270962.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
厚度检测装置的制作方法
下一篇
返回列表