智能眼镜的控制方法、智能眼镜、存储介质及计算机程序产品与流程
- 国知局
- 2024-08-19 14:22:18
本申请涉及智能眼镜,尤其涉及智能眼镜的控制方法、智能眼镜、存储介质及计算机程序产品。
背景技术:
1、智能眼镜是指如同智能手机一样拥有独立的操作系统,可以通过软件安装来实现各种功能的可穿戴的眼镜设备统称。作为融合信息科技与可穿戴设备前沿领域的代表性产品,智能眼镜因其多元化的功能整合与智能化的操作体验,得到了广泛关注和广泛应用。
2、目前,智能眼镜的控制方法主要分为按键触发和语音触发。然而,这两中控制方法均存在适用场景受限的技术问题,其中,语音触发的控制方法在课堂、会议、电影院等不便于发出声音或需要保持安静的场景下存在局限性,按键触发的控制方法在用户双手忙碌或手部残疾的情况下无法满足用户的操作需求。
技术实现思路
1、本申请的主要目的在于提供一种智能眼镜的控制方法、智能眼镜、存储介质及计算机程序产品,旨在解决相关技术中智能眼镜的控制方法适用场景受限的技术问题。
2、为实现上述目的,本申请提供一种智能眼镜的控制方法,所述智能眼镜包括骨传导语音拾取单元,所述方法包括:
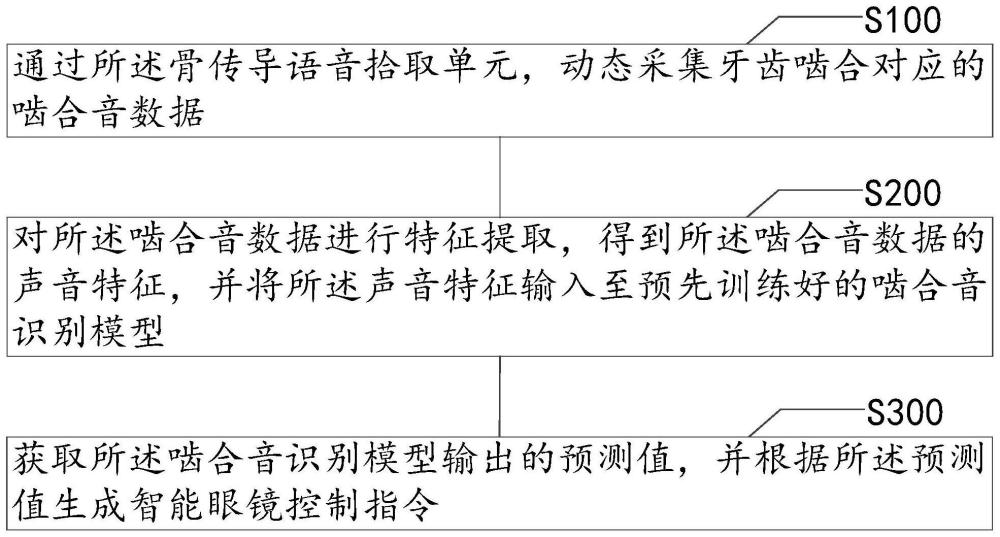
3、通过所述骨传导语音拾取单元,动态采集牙齿啮合对应的啮合音数据;
4、对所述啮合音数据进行特征提取,得到所述啮合音数据的声音特征,并将所述声音特征输入至预先训练好的啮合音识别模型;
5、获取所述啮合音识别模型输出的预测值,并根据所述预测值生成智能眼镜控制指令。
6、在一实施例中,所述方法还包括:
7、获取预先准备好的多份不同牙齿啮合次数的啮合音识别训练数据,以及各所述啮合音识别训练数据的标签,其中,所述啮合音识别训练数据通过所述骨传导语音拾取单元采集,所述标签表征啮合音识别训练数据对应的牙齿啮合次数;
8、对各所述啮合音识别训练数据进行特征提取,得到各所述啮合音识别训练数据的声音特征;
9、基于各所述啮合音识别训练数据的声音特征和标签,构建啮合音识别训练数据集;
10、将所述啮合音识别训练数据集输入至预设的机器学习模型中进行训练,得到训练好的啮合音识别模型。
11、在一实施例中,所述对各所述啮合音识别训练数据进行特征提取的步骤包括:
12、通过主成分分析法对各所述啮合音识别训练数据进行特征提取。
13、在一实施例中,所述机器学习模型包括支持向量机模型,所述将所述啮合音识别训练数据集输入至预设的机器学习模型中进行训练的步骤包括:
14、将所述啮合音识别训练数据集输入至预设的支持向量机模型中进行训练。
15、在一实施例中,所述机器学习模型包括移动神经网络模型,所述将所述啮合音识别训练数据集输入至预设的机器学习模型中进行训练的步骤包括:
16、将所述啮合音识别训练数据集输入至预设的移动神经网络模型中进行训练。
17、在一实施例中,所述骨传导语音拾取单元包括骨传导麦克风和模数转换器,所述通过所述骨传导语音拾取单元,动态采集牙齿啮合对应的啮合音数据的步骤包括:
18、通过所述骨传导麦克风动态检测牙齿啮合对应的振动信号,并将所述振动信号转换为电信号;
19、通过所述模数转换器将所述电信号转换为数字信号,以动态采集牙齿啮合对应的啮合音数据。
20、在一实施例中,所述对所述啮合音数据进行特征提取的步骤之前包括:
21、对所述啮合音数据进行预处理,以更新所述啮合音数据,其中,所述预处理包括滤波、分帧、加窗和归一化。
22、在一实施例中,所述智能眼镜包括拍摄模块,所述根据所述预测值生成智能眼镜控制指令的步骤包括:
23、若所述预测值为第一预测值,则生成拍照指令,其中,所述拍照指令用于控制所述拍摄模块执行拍照操作;
24、若所述预测值为第二预测值,则生成录像指令,其中,所述录像指令用于控制所述拍摄模块执行录像操作。
25、在一实施例中,所述智能眼镜包括听歌模块,所述根据所述预测值生成智能眼镜控制指令的步骤包括:
26、若所述预测值为第三预测值,则生成听歌指令,其中,所述听歌指令用于控制所述听歌模块执行听歌操作;
27、若所述预测值为第四预测值,则生成切歌指令,其中,所述切歌指令用于控制所述听歌模块执行切歌操作;
28、若所述预测值为第五预测值,则生成暂停指令,其中,所述暂停指令用于控制所述听歌模块执行暂停操作。
29、此外,为实现上述目的,本申请还提供一种智能眼镜,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上文所述的智能眼镜的控制方法的步骤。
30、此外,为实现上述目的,本申请还提出一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的智能眼镜的控制方法的步骤。
31、此外,为实现上述目的,本申请还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如上文所述的智能眼镜的控制方法的步骤。
32、本申请提供了一种智能眼镜的控制方法,该智能眼镜包括骨传导语音拾取单元。本申请通过骨传导语音拾取单元动态采集牙齿啮合对应的啮合音数据,通过对啮合音数据进行特征提取,得到啮合音数据的声音特征,并将该声音特征输入至预先训练好的啮合音识别模型,提高识别啮合音的效率和准确性,通过获取该啮合音识别模型输出的预测值,并根据该预测值生成智能眼镜控制指令,从而对智能眼镜进行控制,实现了牙齿啮合触发控制智能眼镜。相比于按键触发和语音触发的控制方式,本申请提供的牙齿啮合触发的控制方式,几乎不受环境、气候、手套穿戴等因素影响,也不会对其他人造成影响,即使是残障人士或特定医疗需求的用户,也能在各种场景中通过牙齿啮合的动作触发智能眼镜的控制指令,适用场景十分广。
技术特征:1.一种智能眼镜的控制方法,其特征在于,所述智能眼镜包括骨传导语音拾取单元,所述方法包括:
2.如权利要求1所述的智能眼镜的控制方法,其特征在于,所述方法还包括:
3.如权利要求2所述的智能眼镜的控制方法,其特征在于,所述对各所述啮合音识别训练数据进行特征提取的步骤包括:
4.如权利要求2所述的智能眼镜的控制方法,其特征在于,所述机器学习模型包括支持向量机模型,所述将所述啮合音识别训练数据集输入至预设的机器学习模型中进行训练的步骤包括:
5.如权利要求2所述的智能眼镜的控制方法,其特征在于,所述机器学习模型包括移动神经网络模型,所述将所述啮合音识别训练数据集输入至预设的机器学习模型中进行训练的步骤包括:
6.如权利要求1所述的智能眼镜的控制方法,其特征在于,所述骨传导语音拾取单元包括骨传导麦克风和模数转换器,所述通过所述骨传导语音拾取单元,动态采集牙齿啮合对应的啮合音数据的步骤包括:
7.如权利要求6所述的智能眼镜的控制方法,其特征在于,所述对所述啮合音数据进行特征提取的步骤之前包括:
8.如权利要求1至7中任一项所述的智能眼镜的控制方法,其特征在于,所述智能眼镜包括拍摄模块,所述根据所述预测值生成智能眼镜控制指令的步骤包括:
9.如权利要求8所述的智能眼镜的控制方法,其特征在于,所述智能眼镜包括听歌模块,所述根据所述预测值生成智能眼镜控制指令的步骤包括:
10.一种智能眼镜,其特征在于,所述智能眼镜包括骨传导语音拾取模块、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如权利要求1至9中任一项所述的智能眼镜的控制方法的步骤。
11.一种存储介质,其特征在于,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至9中任一项所述的智能眼镜的控制方法的步骤。
12.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如权利要求1至9中任一项所述的智能眼镜的控制方法的步骤。
技术总结本申请公开了一种智能眼镜的控制方法、智能眼镜、存储介质及计算机程序产品,涉及智能眼镜技术领域,该智能眼镜的控制方法包括:通过骨传导语音拾取单元,动态采集牙齿啮合对应的啮合音数据;对啮合音数据进行特征提取,得到啮合音数据的声音特征,并将声音特征输入至预先训练好的啮合音识别模型;获取啮合音识别模型输出的预测值,并根据预测值生成智能眼镜控制指令。本申请几乎不受环境、气候、手套穿戴等因素影响,也不会对其他人造成影响,适用场景广。技术研发人员:刘成金,张庆凯受保护的技术使用者:歌尔科技有限公司技术研发日:技术公布日:2024/8/16本文地址:https://www.jishuxx.com/zhuanli/20240819/274931.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表