一种全天候车辆检测方法与装置
- 国知局
- 2024-08-19 14:26:27
本发明涉及自动驾驶车辆检测,具体涉及一种全天候车辆检测方法与装置。
背景技术:
1、车辆检测和环境感知是实现自动驾驶的重要组成部分。车辆检测技术旨在识别并定位交通场景中的车辆,帮助系统做出行驶决策。然而,在实际应用中,环境条件的多样性和复杂性给车辆检测带来了巨大挑战。
2、传统的车辆检测方法通常依赖于图像处理和计算机视觉技术,如边缘检测、背景减除和基于haar特征的分类器等。这些方法在简单和理想的环境中能够取得较好的效果,但在复杂的现实场景中,性能往往大幅下降。尤其在恶劣天气(如雨天、雪天、雾天)和不同光线条件(如夜间、逆光)的影响下,传统的车辆检测技术往往无法保证稳定性和准确性。
3、鉴于以上挑战,研发一种能够在各种天气和光线条件下稳定运行的全天候车辆检测方法与装置显得尤为重要,确保在晴天、雨天、雾天、雪天和夜间等各种条件下,都能准确、可靠地检测车辆。
技术实现思路
1、本发明的目的是提供一种全天候车辆检测方法与装置,本发明综合运用了深度学习技术和传统图像处理技术,能够在各种天气条件和光线条件下都能准确地检测车辆。一种全天候车辆检测方法与装置,包括:
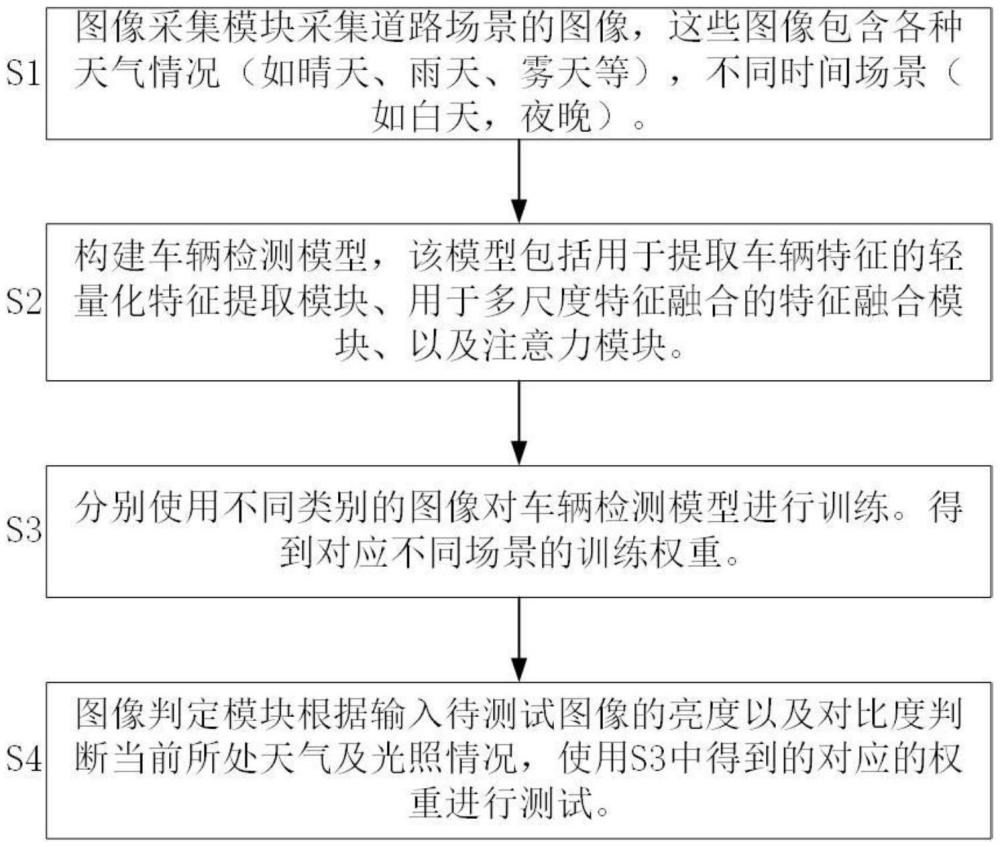
2、s1,图像采集模块采集道路场景的图像,这些图像包含各种天气情况(如晴天、雨天、雾天等),不同时间场景(如白天,夜晚)。
3、s2,构建车辆检测模型,该模型包括用于提取车辆特征的轻量化特征提取模块、用于多尺度特征融合的特征融合模块、以及注意力模块。
4、s3,分别使用不同类别的图像对车辆检测模型进行训练,得到对应不同场景的训练权重。
5、s4,图像判定模块根据输入待测试图像的亮度以及对比度判断当前所处天气及光照情况,使用s3中得到的对应的权重进行测试。
6、进一步地,s2中所述特征提取模块通过轻量化的特征提取网络ghosthgnetv2进行车辆目标的特征提取。ghosthgnetv2由多个包含ghost卷积的hgblock组成,首先通过n个ghost卷积层,每个卷积层的输出作为下一个卷积层的输入。其中,第一个卷积层输入通道数为c1,其余卷积层的输入通道为cm,输出通道数为cm,卷积核大小为k,卷积层数量为n。所有卷积层的输出在通道维度上进行拼接,拼接后的特征图通道数为c1+n*cm,拼接后的输出通过一个1×1的squeeze卷积层将通道数减少为c2/2,起到压缩特征的作用。然后再通过一个1×1的excitation卷积层,将通道数恢复到原始输出通道数c2,起到重新校准特征的作用。
7、进一步地,输入图像经过特征提取后得到5个不同尺度的特征图,其分辨率依次减小。多尺度特征融合模块将同尺度的特征图使用1×1卷积降维,将大尺度的特征图先使用1×1卷积降维,再使用3×3步长为2的卷积进行下采样,将小尺度的特征图使用2×2的转置卷积进行降采样,然后将三部分得到的特征图进行通道维度上的拼接,实现多尺度特征融合。
8、进一步地,s2所述双层空间注意力模块由双层路由注意力机制和空间注意力机制组成。双层路由注意力机制建立任务之间的关联和信息交互,减少无效任务之间产生的干扰,增强有效信息之间的交互。空间注意力机制将输入特征图通过通道上的最大池化和平均池化,得到两个空间特征图,然后通过一个卷积层生成空间注意力图。
9、进一步地,s4中图像判定模块将输入的测试图像转换为灰度图,计算灰度图的直方图并进行归一化,计算图像的亮度均值和标准差,其计算公式为:
10、
11、其中,μ表示图像的平均亮度,n表示图像中像素的总数,ii表示第i个像素的亮度值,σ表示图像的亮度标准差。
12、设定判定标准,当图像的平均亮度大于180且标准差小于60时,判定为晴天。当图像的平均亮度小于130且标准差大于80时,判定为雨雾天气。当图像的平均亮度小于100时,判定为夜间。根据天气判定的结果采用相应的训练权重对输入待测图像进行测试,得到输出结果。
13、本发明所述的一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器用于存放计算机程序;处理器用于执行存储器上所存放的程序时,实现上述方法中任一所述的方法步骤。
14、本发明所述的一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述方法中任一所述的方法步骤。
15、本发明与现有技术相比,有益效果在于:
16、本发明所述的一种全天候车辆检测方法与装置采集不同天气条件和光照条件的交通图像,并通过轻量化的特征提取模块提取图像特征,采用多尺度特征融合模块融合不同尺度的特征以获得更多的空间和细节信息,然后通过双层空间注意力模块过滤无效信息,调整注意力分布,有效地利用有用的信息,提高全天候车辆检测的准确率。
17、本发明结合了深度学习模型和传统图像处理技术,能够准确识别并定位交通场景中的车辆,大大降低了漏检和误检率,提高了检测的精度,能够在各种恶劣天气(如雨天、雪天、雾天)和不同光线条件(如夜间、逆光)下稳定运行并根据实时检测的环境数据动态调整检测算法,适应不同的天气和光线条件,保证了检测的可靠性和稳定性,同时具有较强的可扩展性,可以根据需求进行灵活配置和定制化开发。
技术特征:1.一种全天候车辆检测方法与装置,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种全天候车辆检测方法,其特征在于s2中所述特征提取模块通过轻量化的特征提取网络ghosthgnetv2进行车辆目标的特征提取。ghosthgnetv2由多个包含ghost卷积的hgblock组成,首先通过多个ghost卷积层,每个卷积层的输出作为下一个卷积层的输入。其中,第一个卷积层输入通道数为c1,其余卷积层的输入通道为cm,输出通道数为c2,卷积核大小为k,卷积层数量为n。所有卷积层的输出在通道维度上进行拼接,拼接后的特征图通道数为c1+n*cm,拼接后的输出通过一个1×1的squeeze卷积层将通道数减少为c2/2,起到压缩特征的作用。然后再通过一个1×1的excitation卷积层,将通道数恢复到原始输出通道数c2,起到重新校准特征的作用。
3.根据权利要求1所述的一种全天候车辆检测方法,其特征在于s2中所述多尺度特征融合模块将不同尺度特征图拼接融合。轻量化特征提取模块的输出为5个不同尺度的特征图fi={f1,f2,f3,f4,f5},其分辨率依次减小。多尺度特征融合模块将同尺度的特征图使用1×1卷积降维,将大尺度的特征图先使用1×1卷积降维,再使用3×3步长为2的卷积进行下采样,将小尺度的特征图使用2×2的转置卷积进行降采样,然后将三部分得到的特征图进行通道维度上的拼接,得到融合后的特征图ni={n1,n2,n3},实现多尺度特征融合。
4.根据权利要求1所述的一种全天候车辆检测方法,其特征在于s2中所述双层空间注意力模块由双层路由注意力机制和空间注意力机制组成。双层路由注意力机制输入特征图将其划分为m×m个不同的区域,其中每个区域包含个特征向量,即
5.根据权利要求1所述的一种全天候车辆检测方法,其特征在于s4中所述图像判定模块根据输入图像的亮度以及对比度判断当前所处天气及光照情况,使用对应的权重进行测试。
6.一种电子设备,其特征在于,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成上述权利要求1方法所述的步骤。
7.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,完成上述权利要求1方法所述的步骤。
技术总结本发明公开了一种全天候车辆检测方法与装置,包括图像采集模块采集不同天气条件和光照条件的交通图像;构建车辆检测模型,模型包括特征提取模块、特征融合模块、以及注意力模块;分别使用不同类别的图像对车辆检测模型进行训练,得到对应不同场景的训练权重;图像判定模块根据输入待测试图像的亮度以及对比度判断当前所处天气及光照情况,使用对应的权重进行测试,得到检测结果。本发明结合了深度学习模型和传统图像处理技术能够在不同天气条件和不同光线条件下稳定运行并根据实时检测的环境数据动态调整检测算法,保证了检测的可靠性和稳定性。技术研发人员:颜飞,刘岚,刘云清受保护的技术使用者:长春理工大学技术研发日:技术公布日:2024/8/16本文地址:https://www.jishuxx.com/zhuanli/20240819/275206.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。