道路巡查任务处理方法、装置、终端、介质和程序产品与流程
- 国知局
- 2024-08-22 14:20:52
本发明涉及智能交通,具体涉及一种道路巡查任务处理方法、装置、终端、存储介质和计算机程序产品,特别是涉及一种基于轨迹点的道路巡查任务处理方法、装置、终端、存储介质和计算机程序产品。
背景技术:
1、道路及其配套设施构成了城市交通运营与管理的核心元素,同时,这些设施的日常维护保养亦成为城市市容市政管理部门的核心任务之一,对于实现城市管理精细化具有重要意义。
2、在应对局部小范围的路基损害、路面塌陷、雨水井的损坏以及侧石缘石损伤等细微病害时,尚未能实现全机械化操作,依然依赖于市政道路巡查人员人工巡查来发现问题;另外,相关方案中,在判断道路巡查任务是否完成时也需要审核人员人工审核,极大地增加了人工成本。
3、因此,亟需开发一种道路巡查任务处理方法、装置、终端、存储介质和计算机程序产品,特别是一种基于轨迹点的道路巡查任务处理方法、装置、终端、存储介质和计算机程序产品,能够通过市政道路巡查人员的轨迹点自动判断道路巡查任务的完成状态,极大地提高审核效率,降低市政道路养护运维的成本。
4、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的目的是提供一种道路巡查任务处理方法、装置、终端、存储介质和计算机程序产品,通过市政道路巡查人员的轨迹点自动判断道路巡查任务的完成状态,极大地提高审核效率,降低市政道路养护运维的成本。
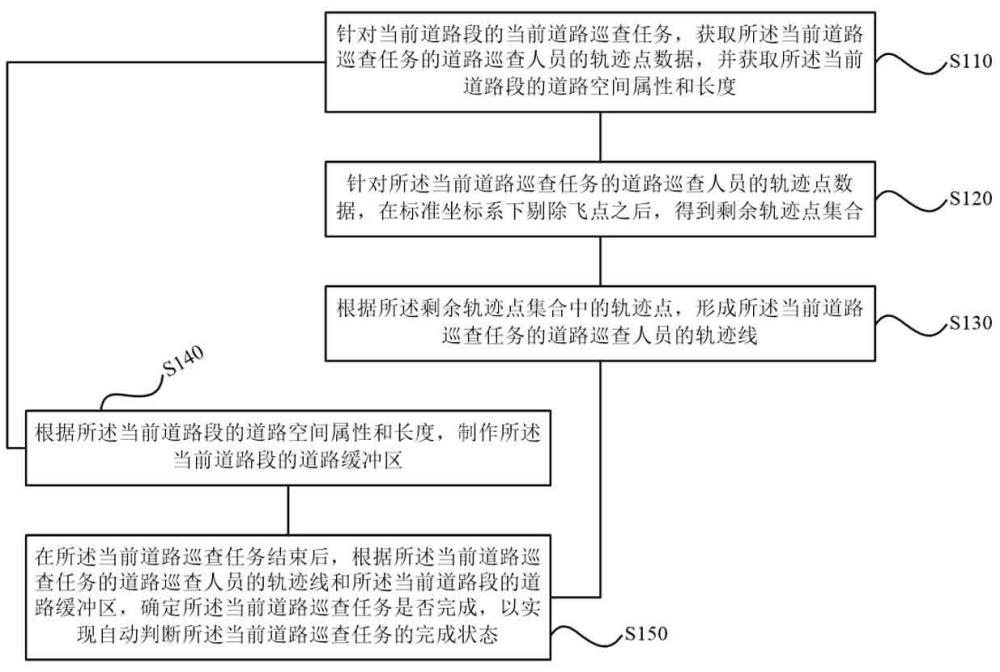
2、为解决上述技术问题,作为本发明的一个方面,提供了一种道路巡查任务处理方法,包括:针对当前道路段的当前道路巡查任务,获取所述当前道路巡查任务的道路巡查人员的轨迹点数据,并获取所述当前道路段的道路空间属性和长度;针对所述当前道路巡查任务的道路巡查人员的轨迹点数据,在标准坐标系下剔除飞点之后,得到剩余轨迹点集合;根据所述剩余轨迹点集合中的轨迹点,形成所述当前道路巡查任务的道路巡查人员的轨迹线;根据所述当前道路段的道路空间属性和长度,制作所述当前道路段的道路缓冲区;在所述当前道路巡查任务结束后,根据所述当前道路巡查任务的道路巡查人员的轨迹线和所述当前道路段的道路缓冲区,确定所述当前道路巡查任务是否完成,以实现自动判断所述当前道路巡查任务的完成状态。
3、根据本发明一示例实施方式,获取所述当前道路巡查任务的道路巡查人员的轨迹点数据,包括:获取在数据库中存储的所述当前道路巡查任务的道路巡查人员的轨迹点数据,作为所述当前道路巡查任务的道路巡查人员的轨迹点数据;其中,所述数据库中存储的所述当前道路巡查任务的道路巡查人员的轨迹点数据,是由服务器接收所述当前道路巡查任务的道路巡查人员所携带的客户端设备在一段时间内定时发送的轨迹点后,上报至所述数据库,在所述数据库中按时间顺序存储的数据。
4、根据本发明一示例实施方式,针对所述当前道路巡查任务的道路巡查人员的轨迹点数据,在预设的标准坐标系下剔除飞点之后,得到剩余轨迹点集合,包括:
5、将所述当前道路巡查任务的道路巡查人员的轨迹点数据,按获取的时间先后顺序,存储在预设的有序数组中,得到所述有序数组中的轨迹点数据;按预设的标准坐标系,对所述有序数组中的轨迹点数据的轨迹点坐标系进行校准;在所述标准坐标下,计算所述有序数组中的轨迹点数据中的相邻两个轨迹点之间的距离,若该距离的绝对值大于标准距离,则将该相邻两个轨迹点中时序上在后的轨迹点确定为飞点,并在所述有序数组中的轨迹点数据中剔除该飞点;以此,剔除所述有序数组中的轨迹点数据中的所有飞点之后,得到剩余轨迹点集合;其中,所述标准距离,是所述当前道路段所在城市的最高时速、以及与所述有序数组中的轨迹点数据中的相邻两个轨迹点之间的时间间隔的乘积的值。
6、根据本发明一示例实施方式,根据所述剩余轨迹点集合中的轨迹点,形成所述当前道路巡查任务的道路巡查人员的轨迹线,包括:从所述剩余轨迹点集合中时序上最早的一个轨迹点开始,将所述剩余轨迹点集合中所有轨迹点按时序依次相连,形成的连线作为所述当前道路巡查任务的道路巡查人员的轨迹线。
7、根据本发明一示例实施方式,根据所述当前道路段的道路空间属性和长度,制作所述当前道路段的道路缓冲区,包括:根据所述当前道路段的道路空间属性,确定所述当前道路段的路面区域和形状,作为所述当前道路段的原道路面;将所述当前道路段的长度与预设的缓冲系数的乘积的值,作为所述当前道路段的缓冲区的半径;按所述当前道路段的缓冲区的半径,在所述当前道路段的原道路面的外围设置缓冲区,得到所述当前道路段的道路缓冲区。
8、根据本发明一示例实施方式,根据所述当前道路巡查任务的道路巡查人员的轨迹线和所述当前道路段的道路缓冲区,确定所述当前道路巡查任务是否完成,包括:将所述当前道路巡查任务的道路巡查人员的轨迹线、以及所述当前道路段的道路缓冲区进行空间相交,得到相交线;并确定所述相交线的长度;确定所述相交线的长度与所述当前道路段的长度的比值;确定所述相交线的长度与所述当前道路段的长度的比值是否大于预设的误差系数;若确定所述相交线的长度与所述当前道路段的长度的比值大于预设的误差系数,则确定所述当前道路巡查任务已被完成;若确定所述相交线的长度与所述当前道路段的长度的比值小于或等于预设的误差系数,则确定所述当前道路巡查任务未被完成。
9、作为本发明的第二个方面,本发明提供一种道路巡查任务处理装置,包括:获取单元,被配置为针对当前道路段的当前道路巡查任务,获取所述当前道路巡查任务的道路巡查人员的轨迹点数据,并获取所述当前道路段的道路空间属性和长度;控制单元,被配置为针对所述当前道路巡查任务的道路巡查人员的轨迹点数据,在标准坐标系下剔除飞点之后,得到剩余轨迹点集合;所述控制单元,还被配置为根据所述剩余轨迹点集合中的轨迹点,形成所述当前道路巡查任务的道路巡查人员的轨迹线;所述控制单元,还被配置为根据所述当前道路段的道路空间属性和长度,制作所述当前道路段的道路缓冲区;所述控制单元,还被配置为在所述当前道路巡查任务结束后,根据所述当前道路巡查任务的道路巡查人员的轨迹线和所述当前道路段的道路缓冲区,确定所述当前道路巡查任务是否完成,以实现自动判断所述当前道路巡查任务的完成状态。
10、根据本发明一示例实施方式,所述获取单元,获取所述当前道路巡查任务的道路巡查人员的轨迹点数据,包括:获取在数据库中存储的所述当前道路巡查任务的道路巡查人员的轨迹点数据,作为所述当前道路巡查任务的道路巡查人员的轨迹点数据;其中,所述数据库中存储的所述当前道路巡查任务的道路巡查人员的轨迹点数据,是由服务器接收所述当前道路巡查任务的道路巡查人员所携带的客户端设备在一段时间内定时发送的轨迹点后,上报至所述数据库,在所述数据库中按时间顺序存储的数据。
11、根据本发明一示例实施方式,所述控制单元,针对所述当前道路巡查任务的道路巡查人员的轨迹点数据,在预设的标准坐标系下剔除飞点之后,得到剩余轨迹点集合,包括:将所述当前道路巡查任务的道路巡查人员的轨迹点数据,按获取的时间先后顺序,存储在预设的有序数组中,得到所述有序数组中的轨迹点数据;按预设的标准坐标系,对所述有序数组中的轨迹点数据的轨迹点坐标系进行校准;在所述标准坐标下,计算所述有序数组中的轨迹点数据中的相邻两个轨迹点之间的距离,若该距离的绝对值大于标准距离,则将该相邻两个轨迹点中时序上在后的轨迹点确定为飞点,并在所述有序数组中的轨迹点数据中剔除该飞点;以此,剔除所述有序数组中的轨迹点数据中的所有飞点之后,得到剩余轨迹点集合;其中,所述标准距离,是所述当前道路段所在城市的最高时速、以及与所述有序数组中的轨迹点数据中的相邻两个轨迹点之间的时间间隔的乘积的值。
12、根据本发明一示例实施方式,所述控制单元,根据所述剩余轨迹点集合中的轨迹点,形成所述当前道路巡查任务的道路巡查人员的轨迹线,包括:从所述剩余轨迹点集合中时序上最早的一个轨迹点开始,将所述剩余轨迹点集合中所有轨迹点按时序依次相连,形成的连线作为所述当前道路巡查任务的道路巡查人员的轨迹线。
13、根据本发明一示例实施方式,所述控制单元,根据所述当前道路段的道路空间属性和长度,制作所述当前道路段的道路缓冲区,包括:根据所述当前道路段的道路空间属性,确定所述当前道路段的路面区域和形状,作为所述当前道路段的原道路面;将所述当前道路段的长度与预设的缓冲系数的乘积的值,作为所述当前道路段的缓冲区的半径;按所述当前道路段的缓冲区的半径,在所述当前道路段的原道路面的外围设置缓冲区,得到所述当前道路段的道路缓冲区。
14、根据本发明一示例实施方式,所述控制单元,根据所述当前道路巡查任务的道路巡查人员的轨迹线和所述当前道路段的道路缓冲区,确定所述当前道路巡查任务是否完成,包括:将所述当前道路巡查任务的道路巡查人员的轨迹线、以及所述当前道路段的道路缓冲区进行空间相交,得到相交线;并确定所述相交线的长度;确定所述相交线的长度与所述当前道路段的长度的比值;确定所述相交线的长度与所述当前道路段的长度的比值是否大于预设的误差系数;若确定所述相交线的长度与所述当前道路段的长度的比值大于预设的误差系数,则确定所述当前道路巡查任务已被完成;若确定所述相交线的长度与所述当前道路段的长度的比值小于或等于预设的误差系数,则确定所述当前道路巡查任务未被完成。
15、作为本发明的第三个方面,本发明提供一种终端,包括:以上所述的道路巡查任务处理装置。
16、作为本发明的第四个方面,本发明提供一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的道路巡查任务处理方法。
17、作为本发明的第五个方面,本发明提供一种计算机程序,该计算机程序被处理器执行时实现以上所述的道路巡查任务处理方法的步骤。
18、本发明的有益效果是:
19、本发明的方案,通过针对当前道路段的道路巡查任务,获取道路巡查人员在一段时间内按时间排列的轨迹点数据,并获取当前道路段的道路空间属性和长度;在标准坐标系下剔除获取到的轨迹点数据中的飞点之后得到剩余轨迹点集合,针对剩余轨迹点集合中的轨迹点形成轨迹线;根据当前道路段的道路空间属性和长度,制作道路缓冲区;在针对当前道路段的道路巡查任务结束后,确定轨迹线与道路缓冲区的相交线的长度,并确定该长度与当前道路段的长度的比值,根据该比值确定针对当前道路段的道路巡查任务是否完成,以实现自动判断针对当前道路段的道路巡查任务的完成状态;从而,通过市政道路巡查人员的轨迹点自动判断道路巡查任务的完成状态,极大地提高审核效率,降低市政道路养护运维的成本。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278244.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表