一种变化噪声场景下的雷达辐射源识别方法及装置
- 国知局
- 2024-08-22 14:22:22
本发明属于雷达辐射源识别,具体涉及一种变化噪声场景下的雷达辐射源识别方法及装置。
背景技术:
1、雷达辐射源识别的相关工作最早可以追溯到上世纪70年代。传统的辐射源识别方法主要基于脉冲描述字中的统计特征实现,依赖对脉冲描述字参数的建模和统计,然后将待识别的雷达参数与数据库中已有的参数信息进行匹配,通过人工进行验证来实现识别。传统的雷达辐射源识别方法需要耗费大量的人力和时间,并且只能应对早期电磁环境简单、雷达工作模式常规的情况,是一种低效且可信度低的解决方案。
2、由于传统方法难以适应复杂、变化和开放的现代电磁环境,基于智能化的方法被逐渐引入辐射源识别问题,并取得了一系列成果。最初,一些简单的机器学习方法被应用于雷达辐射源识别。近年来,更复杂、完善的深度学习方法被设计出来应对复杂电磁环境的雷达辐射源识别问题。其中,通过一个基于注意力的循环神经网络来识别雷达信号,该网络对时间序列数据很有效,但是计算效率很低。另一种方法,通过非对称卷积挤压和激励网络,在低信噪比下使用归一化自相关特征作为输入,取得了较高的识别精度,但是该方法容易受到丢失脉冲的影响。还有一种方法通过使用时间卷积网络进行雷达信号识别,提供了稳健的性能。然而,根据经验提取的特征并不适合所有条件。在此基础上一种新的方法设计一个组合网络,采用向量化嵌入和挤压-激发机制进行特征提取,并提出了一个非线性、基于度量的关系模块,使得网络可以在目标训练样本数量极少的情况下适应新场景。但工作允许模型在训练阶段接收少量的测试数据,没有考虑测试数据完全不可见的情况。
3、尽管目前关于雷达辐射源识别的域泛化问题研究不够充分,但是计算机视觉领域的最新研究表明,数据增强和域不变表示学习可以显著提高深度模型的泛化能力。同时,对比学习在图像识别任务中也被证明是十分有效的。然而,这些方法大多尚未应用于雷达信号处理。
4、从目前的研究现状来看,传统方法已经无法适应复杂的电磁环境和雷达工作体制。现有的智能化雷达辐射源识别方法虽然缓解信号低信噪比的影响,但没有对变化的噪声场景做出合理的设计。而近年来,域泛化技术在图像识别、语音识别等领域取得了成功,正在推动人工智能思想向包括信息处理在内的广泛领域渗透。
5、综上所述,有必要研发一种用于变化噪声场景雷达辐射源识别的方案,以提高雷达辐射源信号识别在变化场景中的适应性。
技术实现思路
1、为此,本发明提供一种变化噪声场景下的雷达辐射源识别方法及装置,解决雷达辐射源信号识别在变化场景中的适应性差的问题。
2、为了实现上述目的,本发明提供如下技术方案:一种变化噪声场景下的雷达辐射源识别方法,包括:
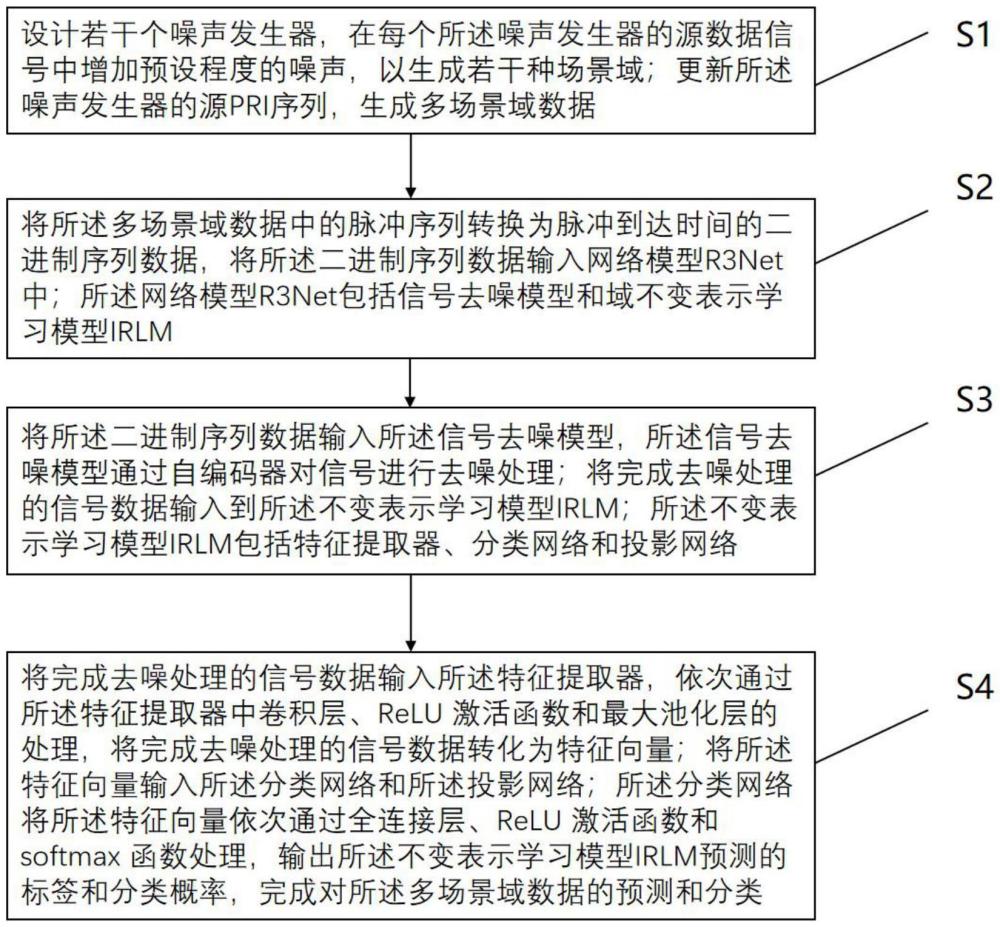
3、设计若干个噪声发生器,在每个所述噪声发生器的源数据信号中增加预设程度的噪声,以生成若干种场景域;更新所述噪声发生器的源pri序列,生成多场景域数据;
4、将所述多场景域数据中的脉冲序列转换为脉冲到达时间的二进制序列数据,将所述二进制序列数据输入网络模型r3net中;所述网络模型r3net包括信号去噪模型和域不变表示学习模型irlm;
5、将所述二进制序列数据输入所述信号去噪模型,所述信号去噪模型通过自编码器对信号进行去噪处理;将完成去噪处理的信号数据输入到所述不变表示学习模型irlm;所述不变表示学习模型irlm包括特征提取器、分类网络和投影网络;
6、将完成去噪处理的信号数据输入所述特征提取器,依次通过所述特征提取器中卷积层、relu激活函数和最大池化层的处理,将完成去噪处理的信号数据转化为特征向量;将所述特征向量输入所述分类网络和所述投影网络;所述分类网络将所述特征向量依次通过全连接层、relu激活函数和softmax函数处理,输出所述不变表示学习模型irlm预测的标签和分类概率,完成对所述多场景域数据的预测和分类。
7、作为一种变化噪声场景下的雷达辐射源识别方法优选方案,在每个所述噪声发生器的源数据信号中增加预设程度的噪声,增加噪声的方式包括添加脉冲、丢弃脉冲和添加高斯噪声;
8、所述添加脉冲是将虚假的脉冲随机插入到源数据信号的pri序列中;
9、所述丢弃脉冲是随机删除源数据信号pri序列脉冲流中的目标脉冲;
10、所述添加高斯噪声是在源数据信号的pri序列中添加加性白高斯噪声。
11、作为一种变化噪声场景下的雷达辐射源识别方法优选方案,将所述多场景域数据中的脉冲序列转换为脉冲到达时间的二进制序列数据的表达式为:
12、
13、
14、式中,ti(n)为脉冲到达时间的二进制序列;qi(k)为脉冲到达时间序列;tw为时间窗;n为序列数量,n∈[1,500];k为噪声发生器数量;为噪声发生器新的pri序列;j为第j个pri序列。
15、作为一种变化噪声场景下的雷达辐射源识别方法优选方案,采用mse损失训练所述信号去噪模型,训练所述信号去噪模型的损失函数为:
16、
17、式中,为信号去噪模型的损失项;为mse损失项;为相关损失项;λ1为正则化参数;
18、mse损失项的计算公式为:
19、
20、式中,m为序列的长度;d(ti)为去噪后的输出序列;ti为输入序列;
21、相关损失项的计算公式为:
22、
23、式中,r(ti,ti)为ti的自相关序列,r(ti,d(ti))为ti和d(ti)的互相关序列。
24、作为一种变化噪声场景下的雷达辐射源识别方法优选方案,采用交叉熵损失引导所述分类网络进行学习,所述交叉熵损失表达式为:
25、
26、
27、式中,为分类网络c的输出;f(ti)为ti经过特征提取器f的输出;yi(n)为yi的第n维度;为的第n维度;nc为辐射源的类别数量;
28、采用infonce损失引导所述投影网络进行学习,所述infonce损失表达式为:
29、
30、zi=p(f(ti))
31、
32、式中,f(ti)为ti经过特征提取器f的输出;为经过特征提取器f的输出;p(f(ti))为f(ti)经过投影网络p的输出;为经过投影网络p的输出;为zi的转置;
33、所述不变表示学习模型irlm的总体损失函数为:
34、
35、式中,λ2为用于平衡损失的正则化参数。
36、本发明还提供一种变化噪声场景下的雷达辐射源识别装置,包括:
37、多场景域数据生成模块,用于设计若干个噪声发生器,在每个所述噪声发生器的源数据信号中增加预设程度的噪声,以生成若干种场景域;更新所述噪声发生器的源pri序列,生成多场景域数据;
38、二进制序列转换模块,将所述多场景域数据中的脉冲序列转换为脉冲到达时间的二进制序列数据,将所述二进制序列数据输入网络模型r3net中;所述网络模型r3net包括信号去噪模型和域不变表示学习模型irlm;
39、信号数据去噪模块,用于将所述二进制序列数据输入所述信号去噪模型,所述信号去噪模型通过自编码器对信号进行去噪处理;将完成去噪处理的信号数据输入到所述不变表示学习模型irlm;所述不变表示学习模型irlm包括特征提取器、分类网络和投影网络;
40、预测标签生成模块,用于将完成去噪处理的信号数据输入所述特征提取器,依次通过所述特征提取器中卷积层、relu激活函数和最大池化层的处理,将完成去噪处理的信号数据转化为特征向量;将所述特征向量输入所述分类网络和所述投影网络;所述分类网络将所述特征向量依次通过全连接层、relu激活函数和softmax函数处理,输出所述不变表示学习模型irlm预测的标签和分类概率,完成对所述多场景域数据的预测和分类。
41、作为一种变化噪声场景下的雷达辐射源识别装置优选方案,所述多场景域数据生成模块中,在每个所述噪声发生器的源数据信号中增加预设程度的噪声,增加噪声的方式包括添加脉冲、丢弃脉冲和添加高斯噪声;
42、所述添加脉冲是将虚假的脉冲随机插入到源数据信号的pri序列中;
43、所述丢弃脉冲是随机删除源数据信号pri序列脉冲流中的目标脉冲;
44、所述添加高斯噪声是在源数据信号的pri序列中添加加性白高斯噪声。
45、作为一种变化噪声场景下的雷达辐射源识别装置优选方案,所述二进制序列转换模块中,将所述多场景域数据中的脉冲序列转换为脉冲到达时间的二进制序列数据的表达式为:
46、
47、
48、式中,ti(n)为脉冲到达时间的二进制序列;qi(k)为脉冲到达时间序列;tw为时间窗;n为序列数量,n∈[1,500];k为噪声发生器数量;为噪声发生器新的pri序列;j为第j个pri序列。
49、作为一种变化噪声场景下的雷达辐射源识别装置优选方案,所述信号数据去噪模块中,采用mse损失训练所述信号去噪模型,训练所述信号去噪模型的损失函数为:
50、
51、式中,为信号去噪模型的损失项;为mse损失项;为相关损失项;λ1为正则化参数;
52、mse损失项的计算公式为:
53、
54、式中,m为序列的长度;d(ti)为去噪后的输出序列;ti为输入序列;
55、相关损失项的计算公式为:
56、
57、式中,r(ti,ti)为ti的自相关序列,r(ti,d(ti))为ti和d(ti)的互相关序列。
58、作为一种变化噪声场景下的雷达辐射源识别装置优选方案,所述预测标签生成模块中,采用交叉熵损失引导所述分类网络进行学习,所述交叉熵损失表达式为:
59、
60、
61、式中,为分类网络c的输出;f(ti)为ti经过特征提取器f的输出;yi(n)为yi的第n维度;为的第n维度;nc为辐射源的类别数量;
62、采用infonce损失引导所述投影网络进行学习,所述infonce损失表达式为:
63、
64、zi=p(f(ti))
65、
66、式中,f(ti)为ti经过特征提取器f的输出;为经过特征提取器f的输出;p(f(ti))为f(ti)经过投影网络p的输出;为经过投影网络p的输出;为zi的转置;
67、所述不变表示学习模型irlm的总体损失函数为:
68、
69、式中,λ2为用于平衡损失的正则化参数。
70、本发明具有如下优点:通过设计若干个噪声发生器,在每个所述噪声发生器的源数据信号中增加预设程度的噪声,以生成若干种场景域;更新所述噪声发生器的源pri序列,生成多场景域数据;将所述多场景域数据中的脉冲序列转换为脉冲到达时间的二进制序列数据,将所述二进制序列数据输入网络模型r3net中;所述网络模型r3net包括信号去噪模型和域不变表示学习模型irlm;将所述二进制序列数据输入所述信号去噪模型,所述信号去噪模型通过自编码器对信号进行去噪处理;将完成去噪处理的信号数据输入到所述不变表示学习模型irlm;所述不变表示学习模型irlm包括特征提取器、分类网络和投影网络;将完成去噪处理的信号数据输入所述特征提取器,依次通过所述特征提取器中卷积层、relu激活函数和最大池化层的处理,将完成去噪处理的信号数据转化为特征向量;将所述特征向量输入所述分类网络和所述投影网络;所述分类网络将所述特征向量依次通过全连接层、relu激活函数和softmax函数处理,输出所述不变表示学习模型irlm预测的标签和分类概率,完成对所述多场景域数据的预测和分类。本发明针对训练域分布单一的问题,提出了用于雷达信号的数据增强方法,丰富不同噪声环境下的训练实例,从而扩展训练域的分布。其次,为有效提升模型泛化性,设计了变化噪声场景雷达辐射源分类网络r3net,通过信号去噪和跨域不变表征学习完成不同噪声水平下的辐射源识别,解决了雷达辐射源信号识别在变化场景中的适应性差的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278395.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。