一种大场景下高速弹体的三维位姿测量方法与流程
- 国知局
- 2024-08-22 14:22:23
本发明属图形处理,具体涉及一种大场景下高速弹体的三维位姿测量方法。
背景技术:
1、导弹的末弹道参数受落区涉及地域广阔、自然环境恶劣、场景干扰内容复杂以及导弹自身速度快、体积小等因素的限制,其准确检测较为困难。因此,构建一种适用于大场景下高速弹体的三维位姿测量方法,在满足试验要求的同时,能够有效提高测量结果精度与可靠性,具有重要意义。
2、文献“黄会敏.基于图像的三维重建即测量技术研究[d].中国科学院大学(中国科学院西安光学精密机械研究所),2021.doi:10.27605/d.cnki.gkxgs.2020.000040.”提出的基于双目立体视觉的三维位姿测量方法,主要利用左右图像时差估计深度信息,分为相机标定、立体匹配和三维信息恢复三个步骤。文献“黄莎莎,柳琦,乔嘉.高速弹体的运动姿态测量方法[j].弹箭与制导学报,2018,38(04):73-76.doi:10.15892/j.cnki.djzdxb.2018.04.018.”采用标定好的高速相机测量系统对弹体进行拍摄,后对弹体上喷涂的多个标志点进行交会测量,最终计算获得弹体的运动姿态参数。文献“庄苏峰,屠大维,张旭等.水下双目立体视觉对应点匹配与三维重建方法研究[j].仪器仪表学报,2022,43(05):147-154.doi:10.19650/j.cnki.cjsi,j2209215.”提出了一种水下对应点匹配与三维测量的方法,实现了水下目标的三维重建。文献“闫小宇,陆凡凡,葛芦生等.基于双目立体视觉系统的测量研究[j].重庆工商大学学报(自然科学版),2023,40(03):48-55.doi:10.16055/j.issn.1672-058x.2023.0003.007.”设计了一种基于双目立体视觉的测量系统方法,采用了bm立体匹配特征的方法实现了目标物体的测量。文献“李湘平,鲁军勇,张晓等.脱壳弹弹托分离的双目视觉测量[j].国防科技大学学报,2023,45(01):150-156.”搭建了基于双目视觉原理物体姿态测量平台,实现了对弹体和弹托表面标记点的跟踪和测量。
3、传统的三维位姿测量方法,为保证图像特征匹配,图像存在交叉信息,测量精度依赖于图像匹配精度,导致相机布设光轴夹角小与光轴相临近。同时,高速弹体会导致相机振动、损坏影响测量精度与可靠性。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种大场景下高速弹体的三维位姿测量方法。首先,利用光轴相邻远、光轴夹角大的多个通用高清相机,结合北斗高精度授时技术多角度同步获取高速弹体运动影像,然后基于多光轴融合处理方法完成大场景多视场下的高速弹体三维坐标高精度重建,解决了传统双目视觉测量系统观测高速弹体时易受地冲击振动影响、单个相机受损无法运行等难题,实现了高速弹体三维位姿的高精度、高可靠性测量。
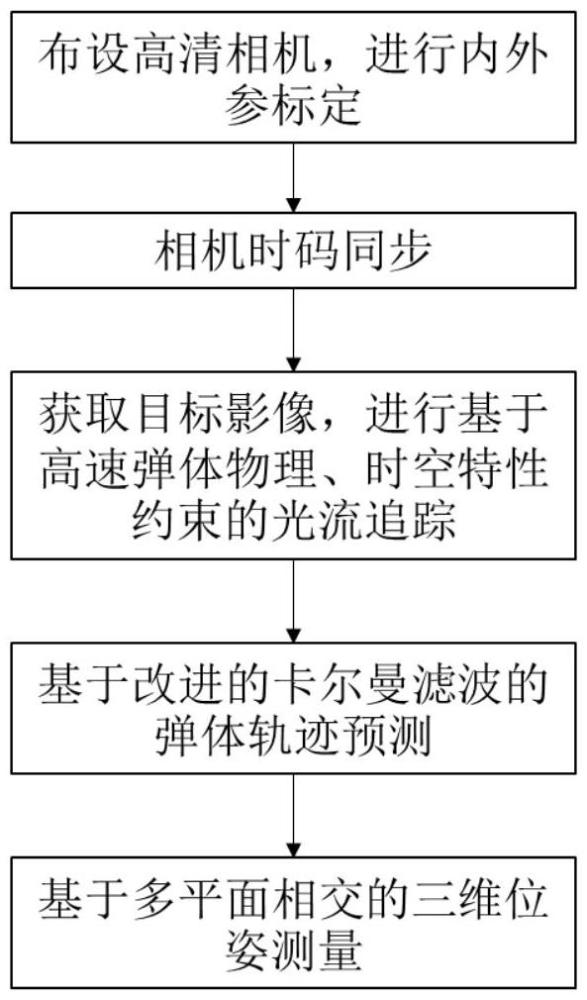
2、一种大场景下高速弹体的三维位姿测量方法,其特征在于步骤如下:
3、步骤1:布设光轴相邻远、光轴夹角大的若干通用高清相机对目标进行拍摄,拍摄前进行相机内外参标定;所述的光轴相邻远是指不同相机之间的距离在140m以上,所述的光轴夹角大是指不同相机朝向之间的夹角在85°以上;
4、步骤2:利用北斗高精度授时技术,统一所有高清相机的时码系统;
5、步骤3:利用同步后的相机分别拍摄目标,各自获取目标序列图像,采用基于物理特性和时空特性约束的lk光流法分别对每台相机获取的图像序列进行光流跟踪,得到若干条目标运动轨迹;
6、步骤4:采用改进的卡尔曼滤波方法对每条目标运动轨迹进行估计预测,得到修正后的目标运动轨迹;所述的改进的卡尔曼滤波方法是指以目标像素坐标和目标运动时间作为参数定义其观测噪声因子的卡尔曼滤波方法;
7、步骤5:对每台相机,构建其光心和其所获取的修正后的目标运动轨迹所在平面,作为其轨道平面,计算两两轨道平面的交线,再利用最小二乘法对得到的所有平面交线进行拟合,得到初始的目标三维运动轨迹,采用最小重投影误差的方法对初始的目标三维轨迹进行非线性优化,得到最终的目标三维运动轨迹,再根据目标的运动轨迹结合几何运算获得目标的三维姿态参数。
8、具体地,步骤1中所述的相机内外参标定具体为:采用张正友标定法进行相机内参标定,再采用pnp问题求解方法进行相机的外参标定。
9、具体地,步骤1中布设光轴相邻远、光轴夹角大的若干通用高清相机的具体方式为:在距离目标物100~150m的圆周线上均匀布设4台高清相机。
10、具体地,步骤2的具体过程为:利用北斗高精度授时模块接收北斗卫星时频信息,在高清相机存储终端附近布设一台ntp时钟服务器将接收到的北斗卫星时频信息作为基准时钟,完成所有高清相机的时码同步,并配置一台笔记本电脑作为时钟网管,用于管理和监视时钟服务器。
11、具体地,步骤3中所述的基于物理特性和时空特性约束的lk光流法是指根据目标的物理特性、时空特性对lk光流法附加约束,其中,物理特性约束包括:a)对于目标运动终止中心点指向某一起始光流点的向量,其在y轴上的映射向量vy与其在x轴上的映射向量vx间的夹角θ总是大于某一阈值h;b)目标在图像中的面积满足s1≥s0,其中,s1表示图像相邻特征点集合的总面积,s0表示特征点集合的总面积阈值,对于长条形目标,其在图像中的长宽比满足l/w≥k;所述的阈值h初始范围为45°-135°,s0初始值为10,阈值k初始值为4;
12、时空特性约束包括:a)目标运动终止点总是在目标运动起始点y1的下方,满足y1≥y2,y1表示目标运动起始点在图像坐标中的纵坐标值,y2表示目标运动终止点在图像坐标中的纵坐标值;b)目标终止运动后会伴随着烟雾以及火焰,通过检测火焰的时间起始点t1过滤掉后续产生的干扰目标,即t≤t1,其中,t表示当前图像的时刻。具体地,步骤4中所述的以目标像素坐标和目标运动时间作为参数定义观测噪声因子的具体公式如下:
13、
14、其中,r表示观测噪声协方差矩阵,r0表示初始噪声协方差矩阵,(m,n)为图像中心坐标,(m0,n0)为目标运动初始时刻坐标,(mk,nk)为k时刻的目标坐标,k表示所处理图像的当前时刻,k0表示所处理图像的初始时刻。
15、具体地,步骤5中所述的采用最小重投影误差的方法对初始的目标三维轨迹进行非线性优化时,设定目标函数如下:
16、
17、其中,f表示目标函数值,pi,j表示计算得到的三维轨迹上第i个相机轨迹上第j个点的坐标在图像坐标中的投影坐标,表示三维轨迹上第i个相机轨迹上第j个点的坐标在图像坐标中的真实投影坐标,n表示三维轨迹上点的个数,k为布设的相机个数,wi表示第i个加权因子,按下式计算:
18、
19、其中,ocip表示第i个相机的像点到目标点之间的距离,ocjp表示第j个相机的像点到目标点之间的距离。
20、具体地,步骤5中所述的根据目标的运动轨迹结合几何运算获得目标的三维姿态参数是指目标的位置、角度和运动速度,其中,位置信息直接由三维运动轨迹读取,角度为三维运动轨迹在空间中与y轴和z轴方向的夹角,运动速度为三维运动距离对于时间的偏导,所述的三维运动距离s为:
21、
22、其中,x'(t)、y'(t)、z'(t)分别表示x轴、y轴、z轴的位置函数相对于时间t的导数;
23、运动速度为v(t)=s'(t)。
24、本发明的有益效果是:1)由于采用了一种与高速弹体运动时间相关的改进的卡尔曼滤波方法,有效解决了观测系统受高速弹体空中运动导致地面相机振动以及高速弹体落地带来地冲击震动影响的难题,实现了高速弹体三维位姿的高精度测量。2)由于采用光心-像平面映射轨迹面,并利用轨迹面相交的方法获得运动轨迹,有效解决了时间系统存在偏差导致的视频帧间时延的问题,实现了高速弹体三维位姿的高可靠性测量。本发明在满足试验要求的同时,能够有效提高测量结果精度与可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278399.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。