一种智能筋膜机器人的制作方法
- 国知局
- 2024-08-22 14:22:31
【】本发明涉及医疗器械,尤其涉及一种可全方位按摩、灵敏精准且安全的智能筋膜机器人。
背景技术
0、背景技术:
1、筋膜仪是一种通过物理振动方式来放松肌肉、筋膜的设备。随着生活方式的改变,许多人在日常活动和工作中会长时间地久坐,日常生活中也缺乏运动,这会导致肌肉紧张、僵硬和不适,而筋膜仪可以通过刺激和放松肌肉、筋膜来缓解这些问题。其次,对于职业运动员和健身爱好者来说,肌肉的恢复和保养都是至关重要的,而筋膜仪可以在他们运动后帮助缓解肌肉酸痛,减少肌肉损伤的风险。
2、目前市面上的筋膜仪通常为手持式筋膜枪和自动式筋膜机器人,但,手持式筋膜枪常为震动按摩,仅作用于皮肤表层或浅层筋膜,其按摩效果较差,且用户使用手持式筋膜枪时,有时因难以控制手持力度大小或者在同一部位使用时间过长,会导致肌肉损伤、瘀伤,此外,手持式结构不利于用户对身体进行全方位按摩;而大多数自动式筋膜机器人,其机械臂并不能全方位移动,可选择的按摩手法有限,且其智能化程度不高,可能会导致按摩力度不够、按摩位置偏移、安全系数低等问题。
技术实现思路
0、技术实现要素:
1、本发明的目的在于提供一种可全方位按摩、灵敏精准且安全的智能筋膜机器人,解决目前筋膜仪不能全方位按摩、不够智能化、灵敏度和安全性较差、按摩效果较差的问题。
2、本发明由以下技术方案实现的:
3、一种智能筋膜机器人,包括底座,所述的底座设有用于模拟按摩动作的机械臂,以及用于控制所述的智能筋膜机器人运行的控制组件,所述的控制组件连接有用于给用户身体提供生物电流的电极组件,所述的机械臂连接有用于按摩和传导生物电流的按摩组件,在所述的按摩组件与所述的电极组件同时接触到用户身体时,所述的按摩组件通过所述的电极组件与所按摩的身体部位之间形成电路回路。
4、如上所述的智能筋膜机器人,所述的电极组件包括通过所述的控制组件控制捕捉传递生物电信号的电极片,以及用于提供热量的发热电极。
5、如上所述的智能筋膜机器人,所述的电极组件的输出电流为100ma。
6、如上所述的智能筋膜机器人,所述的按摩组件包括有用于与用户身体接触的按摩头,以及通过所述的控制组件控制提供红外辐射能和热量的发热元件。
7、如上所述的智能筋膜机器人,所述的按摩头材料为导电材料,所述的按摩头的输出频率为500-1000khz。
8、如上所述的智能筋膜机器人,所述的机械臂包括有固定设置在所述的底座上表面的固定座,所述的固定座连接有用于s轴旋转的第一关节,所述的第一关节连接有用于l轴旋转的第一机械臂,所述的第一机械臂连接有用于u轴旋转的第二机械臂,所述的第二机械臂连接有用于r轴旋转的第二关节,所述的第二关节连接有用于b轴旋转的第三机械臂,所述的第三机械臂与所述的按摩组件旋转连接,使得所述的按摩组件能在t轴旋转。
9、如上所述的智能筋膜机器人,所述的第三机械臂与所述的按摩组件之间设有用于调整所述的机械臂动作的传感器。
10、如上所述的智能筋膜机器人,所述的传感器与所述的第三机械臂之间设有用于监测所述的智能筋膜机器人运行的监测组件。
11、如上所述的智能筋膜机器人,所述的监测组件包括有用于定位按摩区域与实时监控的摄像组件,以及用于测量体感距离的激光传感器。
12、如上所述的智能筋膜机器人,所述的控制组件连接有用于保护用户和设备的复位按钮,所述的复位按钮设于所述的底座上表面。
13、本发明提出了一种智能筋膜机器人,首先,通过电极组件给用户身体提供生物电流,先将负电极片贴在相应的位置,使其通电后可与按摩部位之间形成电路回路,从而产生生物电效应;电极组件中还包括有发热电极,可使电极片产生热量,从而提高用户舒适感,缓解了电极片与用户皮肤贴合所产生的不适感。第二,按摩组件包括有正极按摩头,通过按摩组件上的导电按摩头能将电极组件所提供的生物电流传导到按摩部位,再通过按摩组件产生振动和热量,来提高按摩的舒适度和效果;按摩组件还包括有发热元件,可使按摩头产生红外辐射能,这种红外辐射能深入人体皮下组织,使得皮下深层皮肤温度上升,促进血液循环,还能透入肌肉关节伸出,有利于肌肉放松;此外,按摩头的输出频率为500-1000khz,该频率能深入达到深层筋膜和内脏筋膜层面,从而起到震动作用和产生高频热效应。第三,通过机械臂模拟如:按、推、拉等多种按摩动作,其机械臂具有六个自由度,通过传感器信号实时地调节机械臂的位置和姿态,使得设备能全方位运行,扩大了按摩范围。第四,通过监测组件能够实时监控设备的运行情况,该监测组件包括有用于准确定位按摩区域,以及能从实时画面上查看用户和设备的状态的摄像组件,还包括有能高精度测量体感距离的激光传感器,使得按摩头与人体在一定的安全距离范围内接触,降低了风险。最后,控制组件能对电极组件、按摩组件、机械臂与监测组件进行智能化控制,可精准控制生物电流大小和频率、按摩强度和按摩温度,可实现多种按摩手法、按摩轨迹和按摩力度的切换,还可以根据用户的反馈和其身体状况进行自适应调整,从而提供更加智能化的按摩服务;此外,本发明还设有用于双重保护的复位按钮,在异常情况下,可快速复位设备,此时,机械臂带动按摩组件自动上升至最高位,远离用户,有效保障用户安全和保护设备。
14、本发明以筋膜学理论为基础,结合生物电技术,在智能化控制下,通过按摩组件的振动和放热、电极组件提供的生物电流和红外辐射能,以及六轴机械臂的多种智能化按摩动作,可提供多方位、多样化的智能化按摩方式,实现更为全面、精准、深入的按摩,给用户带来更好的个性化体验;同时,智能化控制,提高了设备的可靠性和安全性,解决目前筋膜仪不能全方位按摩、不够智能化、灵敏度和安全性较差、按摩效果较差的问题。
技术特征:1.一种智能筋膜机器人,包括底座(1),所述的底座(1)设有用于模拟按摩动作的机械臂(2),以及用于控制所述的智能筋膜机器人运行的控制组件(3),其特征在于:所述的控制组件(3)连接有用于给用户身体提供生物电流的电极组件(8),所述的机械臂(2)连接有用于按摩和传导生物电流的按摩组件(4),在所述的按摩组件(4)与所述的电极组件(8)同时接触到用户身体时,所述的按摩组件(4)通过所述的电极组件(8)与所按摩的身体部位之间形成电路回路。
2.根据权利要求1所述的智能筋膜机器人,其特征在于:所述的电极组件(8)包括通过所述的控制组件(3)控制捕捉传递生物电信号的电极片,以及用于提供热量的发热电极。
3.根据权利要求2所述的智能筋膜机器人,其特征在于:所述的电极组件(8)的输出电流为100ma。
4.根据权利要求1所述的智能筋膜机器人,其特征在于:所述的按摩组件(4)包括有用于与用户身体接触的按摩头(41),以及通过所述的控制组件(3)控制提供红外辐射能和热量的发热元件。
5.根据权利要求4所述的智能筋膜机器人,其特征在于:所述的按摩头(41)材料为导电材料,所述的按摩头(41)的输出频率为500-1000khz。
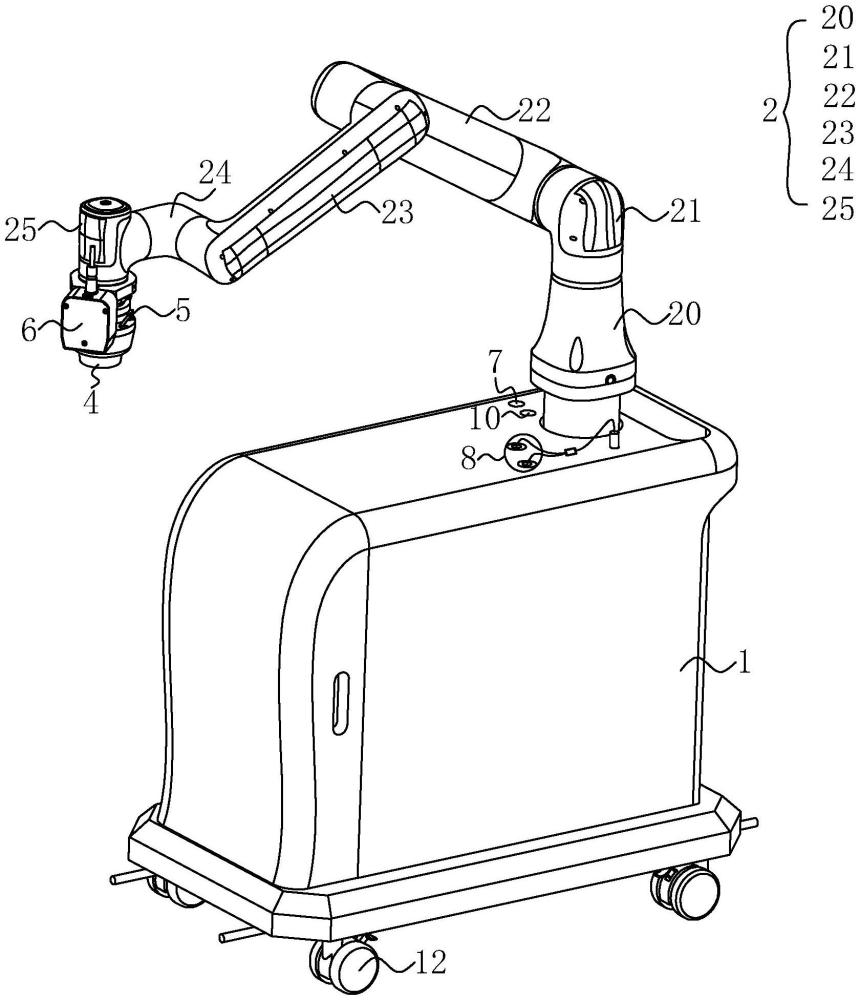
6.根据权利要求1所述的智能筋膜机器人,其特征在于:所述的机械臂(2)包括有固定设置在所述的底座(1)上表面的固定座(20),所述的固定座(20)连接有用于s轴旋转的第一关节(21),所述的第一关节(21)连接有用于l轴旋转的第一机械臂(22),所述的第一机械臂(22)连接有用于u轴旋转的第二机械臂(23),所述的第二机械臂(23)连接有用于r轴旋转的第二关节(24),所述的第二关节(24)连接有用于b轴旋转的第三机械臂(25),所述的第三机械臂(25)与所述的按摩组件(4)旋转连接,使得所述的按摩组件(4)能在t轴旋转。
7.根据权利要求6所述的智能筋膜机器人,其特征在于:所述的第三机械臂(25)与所述的按摩组件(4)之间设有用于调整所述的机械臂(2)动作的传感器(5)。
8.根据权利要求7所述的智能筋膜机器人,其特征在于:所述的传感器(5)与所述的第三机械臂(25)之间设有用于监测所述的智能筋膜机器人运行的监测组件(6)。
9.根据权利要求8所述的智能筋膜机器人,其特征在于:所述的监测组件(6)包括有用于定位按摩区域与实时监控的摄像组件(61),以及用于测量体感距离的激光传感器(62)。
10.根据权利要求1所述的智能筋膜机器人,其特征在于:所述的控制组件(3)连接有用于保护用户和设备的复位按钮(7),所述的复位按钮(7)设于所述的底座(1)上表面。
技术总结本发明的目的在于提供一种智能筋膜机器人,包括有底座、机械臂、控制组件、按摩组件及电极组件,在所述的按摩组件与所述的电极组件同时接触到用户身体时,所述的按摩组件通过所述的电极组件与所按摩的身体部位之间形成电路回路。本发明可根据用户需求,在智能化控制下,可提供个性化按摩服务,实现更为全面、精准、深入的按摩,给用户带来更好的按摩体验。技术研发人员:吴洪德,袁崇昊,袁本晴晓,刘伟荣,陈金坤,刘永,吴俊涛受保护的技术使用者:广东物语云智能科技股份有限公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/278415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表