一种樱桃番茄振动采摘机器人以及方法
- 国知局
- 2024-08-22 14:28:03
本发明涉及樱桃番茄采摘装置和方法,具体涉及一种樱桃番茄振动采摘机器人以及方法。
背景技术:
1、樱桃番茄属于茄科番茄属栽培变种一年生或多年生蔓性草本植物,其果实樱桃番茄主治口渴、食欲不振、便秘,还可降血压与增加人体的抗癌能力,具有很高的食用价值。我国冬种樱桃番茄种植面积超50万亩,广东粤西地区已发展成为我国冬种樱桃番茄主导产区之一,种植面积近10万亩。近年来,樱桃番茄的种植向着大规模规范化的植物工厂种植模式发展,这对樱桃番茄高效采摘的目标带来了挑战。
2、传统的樱桃番茄的采摘主要以人工采摘为主,存在劳动强度大、采摘效率低以及人工成本高的问题。随着农业机器人技术的发展,樱桃番茄采摘机器人得到广泛的研究,现有的樱桃番茄采摘机器人主要采用多轴夹取式机械臂搭载目标检测视觉识别算法对樱桃番茄进行识别并进行单果采摘,虽然搭载目标检测算法的樱桃番茄夹取式采摘机器人能完成精准的采摘任务,但是其单果识别时间较长以及采摘耗时不短的问题,在面对大规模规范化种植的樱桃番茄植物工厂环境,其存在采摘效率过低的问题,不利于樱桃番茄这种采摘周期短的水果在大规模种植环境下的高效快速采摘。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种樱桃番茄振动采摘机器人,该采摘机器人可以快速完成樱桃番茄的采摘工作,具有较高的采摘效率,适用于大规模种植的场合。
2、本发明的另一个目的在于提供一种樱桃番茄振动采摘方法。
3、本发明的目的通过以下技术方案实现:
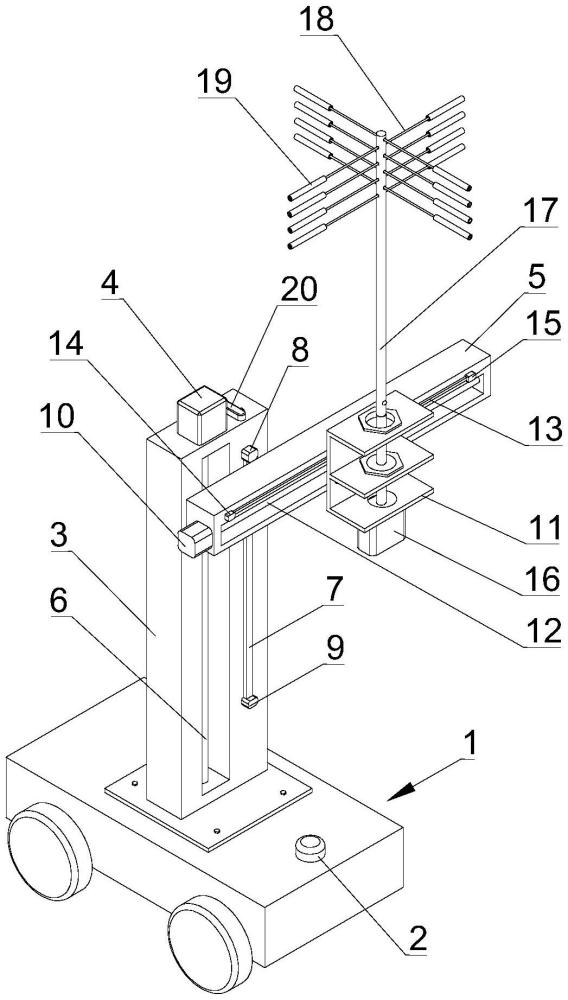
4、一种樱桃番茄振动采摘机器人,包括行走机构以及设置在行走机构上的位置调整机构、振动采摘机构、图像识别机构;
5、所述位置调整机构包括竖向调节机构和横向调节机构;所述横向调节机构与竖向调节机构的驱动端连接;所述横向调节机构的横向调节方向与行走机构的直线行走方向垂直;
6、所述振动采摘机构与横向调节机构的驱动端连接,该振动采摘机构包括振动驱动电机、传动杆和振动杆,所述传动杆的一端与振动驱动电机的驱动端固定连接,该传动杆的一端与振动杆固定连接;所述振动杆设有多组且分别沿着不同的方向延伸,每组振动杆包括多个振动杆;
7、所述图像识别机构包括摄像头和图像处理器;所述摄像头与图像处理器电连接,所述图像处理器分别与位置调整机构和振动采摘机构的控制器电连接。
8、本发明的一个优选方案,其中,所述行走机构包括车身、行走组件和行走控制器;所述车身的前端设置有三维激光雷达,用于收集作业环境点云信息;所述行走控制器与所述三维激光雷达电连接;所述行走机构具有建立导航栅格地图、自身定位、规划路径以及运动执行的功能。
9、本发明的一个优选方案,其中,所述竖向调节机构包括竖向安装架、竖向驱动电机和竖向传动组件;所述竖向安装架竖立固定设置在行走机构的车身上;所述竖向驱动电机设置在所述竖向安装架上;所述竖向传动组件包括竖向传动架、竖向丝杆和竖向丝杆螺母,所述竖向丝杆螺母与竖向传动架固定连接;所述竖向传动架与横向调节机构连接。
10、进一步,所述竖向传动架与竖向安装架之间设有竖向导向结构,该竖向导向结构包括竖向导轨和竖向滑块;所述竖向导轨竖向设置在竖向安装架上,所述竖向滑块与竖向传动架固定连接。
11、进一步,所述竖向导轨的上下方分别设有上限位器和下限位器。
12、进一步,所述横向调节机构包括横向驱动电机和横向传动组件;所述横向驱动电机设置在所述竖向传动架上;所述横向传动组件包括横向传动架、横向丝杆和横向丝杆螺母,所述横向丝杆螺母与横向传动架固定连接;所述横向传动架与振动采摘机构连接。
13、进一步,所述横向传动架与竖向传动架之间设有横向导向结构,该横向导向结构包括横向导轨和横向滑块;所述横向导轨横向设置在竖向传动架上,所述横向滑块与横向传动架固定连接。
14、进一步,所述横向导轨的左右两侧分别设有左限位器和右限位器。
15、进一步,所述横向传动架包括下部中空固定板、中部中空固定板、中部菱形带座轴承、上部中空固定板、上部菱形带座轴承和背部连接板;
16、所述下部中空固定板的中间槽位与振动驱动电机顶部固定连接,所述中部中空固定板的中间槽位安装有中部菱形带座轴承,所述梅花式联轴器安装于中部菱形带座轴承中,所述上部中空固定板的中间槽位安装有上部菱形带座轴承;所述背部连接板与水平滑块表面固定连接。
17、本发明的一个优选方案,其中,所述振动杆远离传动杆的一端套设有棉套,可以防止番茄被打坏。
18、一种樱桃番茄振动采摘方法,包括以下步骤:
19、通过行走机构搭载位置调整机构、振动采摘机构移动至待采摘的番茄的前方;
20、通过摄像头开始获取待采摘的番茄的图像,并将图像上传至图像处理器中,由图像处理器进行图像分析,获得最佳的振动位置,并计算出当前的番茄的最佳采摘振幅与频率;
21、通过图像处理器向位置调整机构的控制器发送对应的位置调节指令,由位置调整机构驱动振动采摘机构移动至最佳的振动位置;
22、通过图像处理器向振动采摘机构的控制器发送最佳采摘振幅与频率指令,由振动采摘机构按照该采摘振幅与频率控制振动杆进行振动,将成熟的番茄振落,完成当前番茄的采摘工作。
23、本发明的一个优选方案,其中,所述图像处理器包括目标检测识别定位模块,该目标检测识别定位模块包括目标检测模块和检测坐标输出模块,所述目标检测模块使用轻量化的目标检测基准模型并采用不同环境不同光照条件下的樱桃番茄图像数据进行训练最后得到检测模型;所述目标检测模块其采用均值平均精度map作为评价指标,表达式为:
24、
25、式中:pr为模型精确度评价指标,re为模型召回率评价指标,ap为平均精度评价指标,map为均值平均精度评价指标。
26、进一步,所述检测坐标输出模块首先根据目标检测模块输出结果提取boundingbox数据,获取当前番茄植株的位置所有果实在当前图像坐标系下的x,y坐标,之后对坐标进行遍历约束以求得图像平面坐标系下的最佳垂直作业域,其作业域范围满足以下约束条件:
27、yarea∈[ymin,ymax];
28、式中ymin为bounding box数据中的y坐标最小值,ymax为bounding box数据中的y坐标最大值;
29、通过检测坐标输出模块向位置调整机构的控制器发送对应的指令,由位置调整机构的控制器控制竖向调节机构进行竖向调节,使振动采摘机构在最佳竖向作业域范围内往复作业。
30、进一步,所述图像处理器还包括深度定位优化模块,该深度定位优化模块通过目标检测识别定位模块输出的坐标计算当前检测果实的平均深度信息,之后遍历每个果实位置深度信息得到深度坐标系下的最佳深度作业域,其作业域范围满足以下约束条件:
31、darea∈[dmin,dmax];
32、式中dmin为深度数据中的深度最小值,dmax为深度数据中的深度最大值;
33、通过检测坐标输出模块向位置调整机构的控制器发送对应的指令,由位置调整机构的控制器控制横向调节机构进行横向调节,使振动采摘机构在最佳横向作业域范围内往复作业。
34、上述方法中,根据作业植株果实的目标定位与深度信息输出最佳垂直作业域与最佳深度作业域融合为采摘精准域,对采摘精准域进行空间范围覆盖的往复作业以提高采摘效果,最后结合自主导航功能提高了采摘机器人的自主运动作业能力。
35、本发明的一个优选方案,其中,计算番茄的最佳采摘振幅与频率的方法为:
36、根据樱桃番茄植株特征,建立在实际作业环境下的参数优化方法,以频率x1和振幅x2为因素,采摘率y1和破损率y2为响应进行响应曲面优化,其建立的回归方程为:
37、
38、式中a、b、c、d、e、f、g、h、i、j、k、l为回归方程系数;
39、对采摘率望大且破损率望小的目标进行设计,寻找振幅与频率的最佳优化组合,其满足以下联立公式:
40、
41、式中f1max为y1对应的回归方程,f2min为y2对应的回归方程。
42、上述方法中,引入响应曲面优化参数方法,首先以樱桃番茄采摘环境下的振动采摘机构的频率和振幅作为因素,采摘率和破损率作为响应构建响应曲面优化回归方程,之后使用响应优化器优化频率和振幅的最优组合解,以实现更高的采摘率和更低的破损率。
43、本发明与现有技术相比具有以下有益效果:
44、本发明的采摘机器人可以快速完成樱桃番茄的采摘工作,具有较高的采摘效率,适用于大规模种植的场合。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278793.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表