多源数据驱动的城市交通事故风险图谱深度预测方法
- 国知局
- 2024-08-22 14:50:16
本发明涉及图谱深度学习领域,具体是一种多源数据驱动的城市交通事故风险图谱深度预测方法。
背景技术:
1、深度学习模型是基于学习样本数据的内在规律和表示层次,并运用在这些学习过程中获得的对于图像、文字的规律构建学习模型,深度学习在探索技术、数据挖掘、机器学习等方面取得了诸多成果。
2、
3、长期以来,多源交通数据(包括gps数据、道路地图信息、交通流信息)缺乏数据融合,无法对城市道路潜在安全风险特征进行有效预测。
技术实现思路
1、本发明提供了一种多源数据驱动的城市交通事故风险图谱深度预测方法,以解决现有技术由于缺乏数据融合导致城市道路风险难以有效预测的问题。
2、为了达到上述目的,本发明所采用的技术方案为:
3、多源数据驱动的城市交通事故风险图谱深度预测方法,包括以下步骤:
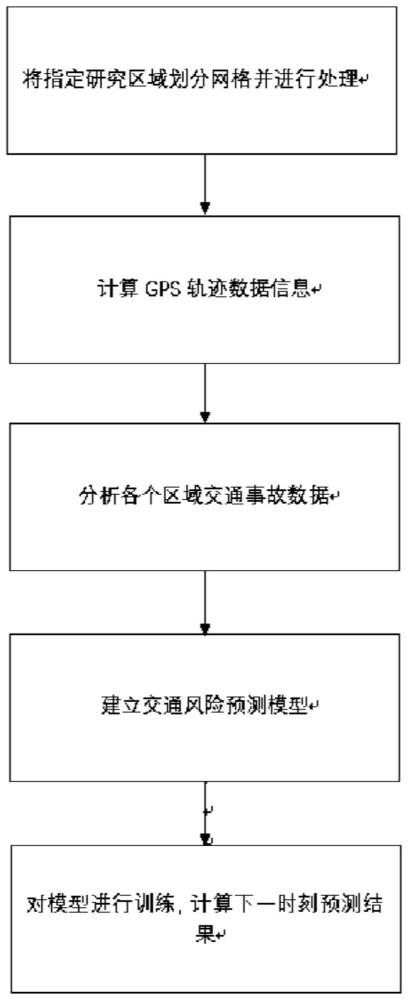
4、步骤1、收集指定地区的卫星图像、交通事故数据、gps轨迹数据,在卫星图像中将指定地区划分为多个网格区域;
5、步骤2、根据指定地区的gps轨迹数据,计算每个网格区域内交通流量数据;
6、步骤3、根据步骤1获得的指定区域交通事故数据分析得到各个网格区域内的交通事故数据,并将每个网格区域交通事故数据划分为历史事故数据集、未来事故数据集,其中历史事故数据集作为数据输入之一,未来事故数据集作为深度模型预测结果检验对比;
7、步骤4、将步骤1中指定地区的gps轨迹数据、步骤2中每个网格区域的交通流量数据和步骤3中每个网格区域历史事故数据作为输入,对深度学习模型进行训练;
8、步骤5、通过训练好的深度学习模型,计算出下一时刻交通事故风险预测情况并与未来事故数据集进行比对,检验预测结果准确性。
9、进一步的,步骤1过程如下:
10、步骤s11、对卫星遥感图像进行合理的像元选择;
11、步骤s12、根据卫星遥感图进行网格区域划分。
12、进一步的,步骤2过程如下:
13、步骤s21、依据网格切割划分统计各个网格区域内gps轨迹点的密度;
14、步骤s22、对每个网格区域gps轨迹数据内包含的速度数据分10%、50%和90%位速度分别统计,并组合成一个三通道的gps特征数据,作为对应网格区域的交通流量数据。
15、进一步的,步骤3过程如下:
16、步骤s31、根据已有的交通事故数据中包含的时间、经纬度、路段信息字段,从已有数据中提取交通事故数据样本;
17、步骤s32、对交通事故数据样本进行预处理;
18、步骤s33、获得每起交通事故数据样本对应的网格区域坐标并映射到对应网格区域,获得各个网格区域内交通事故数据样本;
19、步骤s34、将上步获得的各网格区域交通事故数据样本按时间顺序分为前后两部分数据,分别作为历史事故数据和未来事故数据集。
20、进一步的,步骤4过程如下:
21、s41、选取t时刻的gps轨迹数据、交通流量数据和历史事故数据集组合输入,选取t+1时刻的gps轨迹数据、交通流量数据和历史事故数据集作为输出结果,构建样本并划分训练集和测试集;
22、s42、构建深度学习模型并进行训练,所述深度模型基于resnet-18残差块建立了unet网络模型,首先定义全局参数和网络结构,接着定义数据加载的方式,最后编写训练模块,构建深度模型,用于学习卫星影像、gps轨迹特征信息、历史事故数据背后的与事故风险的潜在关联;
23、s43、将训练集输入到构建的度学习模型中进行训练,将测试集输入到训练好的度学习模型中,得到的输出结果与未来交通事故数据集比对检验结果的准确性,经过反复训练,最终得到交通事故风险预测模型。
24、进一步的,步所述深度学习模型中,卷积与反卷积过程中均使用随机失效操作,卷积神经网络与反卷积神经网络中使用relu函数作为激活函数,全连接层使用sigmoid函数作为激活函数。
25、本发明利用深度学习方法学习交通事故历史数据、gps轨道数据、历史交通事故数据之间的多层次复杂关系,对城市局部区域的交通事故风险进行预测,采用多源数据融合的方法,提高了预测结果的准确性,利用卷积结构学习城市区域的轨迹数据、历史交通事故数据之间的关联关系,建立起多层次的深度学习模型,进一步提高了预测模型结果的准确性。
26、现有大多数技术大多只关注某一类数据对于该区域风险特征的影响结果,本发明采用多源数据融合的方法,考虑了多种来源数据对于区域事故风险特征的影响,从而实现对于某一区域的交通事故风险预测。因此本发明相比现有技术的技术效果和优点为:
27、(1)本发明的数据源利用性更好,对不同类型的交通源数据可以进行有效统合。
28、(2)本发明对道路风险程度进行可视化呈现,能够有效展现研究区域内各路段的道路风险水平。
29、(3)本发明采用多层卷积模型和随即失效方法,得到拟合度较高的数据模型,对于风险分析预测更加有利。
技术特征:1.多源数据驱动的城市交通事故风险图谱深度预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的多源数据驱动的城市交通事故风险图谱深度预测方法,其特征在于,步骤1过程如下:
3.根据权利要求1所述的多源数据驱动的城市交通事故风险图谱深度预测方法,其特征在于,步骤2过程如下:
4.根据权利要求1所述的多源数据驱动的城市交通事故风险图谱深度预测方法,其特征在于,步骤3过程如下:
5.根据权利要求1所述的多源数据驱动的城市交通事故风险图谱深度预测方法,其特征在于,步骤4过程如下:
6.根据权利要求5所述的多源数据驱动的城市交通事故风险图谱深度预测方法,其特征在于,所述深度学习模型中,卷积与反卷积过程中均使用随机失效操作,卷积神经网络与反卷积神经网络中使用relu函数作为激活函数,全连接层使用sigmoid函数作为激活函数。
技术总结本发明公开了一种多源数据驱动的城市交通事故风险图谱深度预测方法,包括以下步骤:步骤1、收集指定地区的卫星图像、交通事故数据、GPS轨迹数据,将指定地区划分为多个网格区域;步骤2、根据指定地区的GPS轨迹数据,计算每个网格区域的交通流量数据;步骤3、根据交通事故数据分析其在各个区域内的交通事故数据;并将每个区域交通事故数据划分为历史事故数据、未来事故数据;步骤4、将所述交通事故数据、GPS轨迹数据、历史事故数据作为输入,对深度学习模型进行训练;步骤5、通过训练好的深度学习模型,并计算出下一时刻交通事故风险预测情况。本发明的数据源利用性更好,能够有效展现研究区域内各路段的道路风险水平。技术研发人员:程泽阳,张焱,翟文韬,张卫华,侯超群,张业寒,张伟,吴文佑受保护的技术使用者:合肥工业大学技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/280067.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。